路面结构化
功能介绍
parking_perception package 是基于 hobot_dnn package开发的路面结构化算法示例,利用BPU进行模型推理,从而得到算法推理结果。 本package支持直接订阅sensors/msg/image类型的话题,并且支持读取本地图片的形式进行推理,将算法信息通过话题发布的同时会将结果在Web页面渲染可视化,同时支持渲染图片保存在程序运行的result目录。
算法支持的目标检测类别如下:
| 类别 | 说明 |
|---|---|
| cyclist | 骑车人 |
| person | 行人 |
| rear | 车背 |
| vehicle | 汽车 |
| parking_lock | 地锁 |
算法支持的语义分割类别如下:
| 类别 | 说明 |
|---|---|
| road | 道路 |
| background | 背景 |
| lane_marking | 车道线 |
| sign_line | 标志线 |
| parking_lane | 车位线 |
| parking_space | 车位区域 |
| parking_rod | 停车杆 |
| parking_lock | 地锁 |
代码仓库: (https://github.com/D-Robotics/parking_perception.git)
应用场景:室外停车区检测算法基于语义分割,识别出图片中的停车区域,可实现自动泊车的功能,主要应用于自动驾驶领域。
小车车位寻找案例:4.8. 小车车位寻找
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK X3, RDK X3 Module | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) | · 启动MIPI/USB摄像头/本地回灌,推理渲染结果在Web显示/保存在本地 |
| X86 | Ubuntu 20.04 (Foxy) | · 启动本地回灌,推理渲染结果在Web显示/保存在本地 |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
X86平台
-
X86环境已配置Ubuntu 20.04系统镜像。
-
X86环境已成功安装tros.b。
使用介绍
package对外发布包含语义分割和目标检测信息的算法msg,用户可以订阅发布msg用于应用开发。
RDK平台
mipi摄像头发布图片
- Foxy
- Humble
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
使用usb摄像头发布图片
- Foxy
- Humble
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
使用单张回灌图片
- Foxy
- Humble
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置回灌图片
export CAM_TYPE=fb
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置回灌图片
export CAM_TYPE=fb
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
X86平台
使用单张回灌�图片
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/parking_perception/config/ .
# 配置回灌图片
export CAM_TYPE=fb
# 启动launch文件
ros2 launch parking_perception parking_perception.launch.py
结果分析
使用mipi摄像头发布图片
package初始化后,在运行终端输出如下信息:
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-08-02-06-46-55-605266-ubuntu-3669
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [mipi_cam-1]: process started with pid [3671]
[INFO] [hobot_codec_republish-2]: process started with pid [3673]
[INFO] [parking_perception-3]: process started with pid [3675]
[INFO] [websocket-4]: process started with pid [3677]
[parking_perception-3] [WARN] [1659394017.194211788] [parking_perception]: Parameter:
[parking_perception-3] shared_men:1
[parking_perception-3] is_sync_mode_: 1
[parking_perception-3] model_file_name_: config/parking_perception_640x320.bin
[parking_perception-3] feed_image:
[parking_perception-3] [INFO] [1659394017.194695288] [dnn]: Node init.
[parking_perception-3] [INFO] [1659394017.194784038] [parking_perception]: Set node para.
[parking_perception-3] [INFO] [1659394017.194845413] [dnn]: Model init.
[parking_perception-3] [BPU_PLAT]BPU Platform Version(1.3.1)!
[parking_perception-3] [C][3675][08-02][06:46:57:202][configuration.cpp:49][EasyDNN]EasyDNN version: 0.4.11
[parking_perception-3] [HBRT] set log level as 0. version = 3.14.5
[parking_perception-3] [DNN] Runtime version = 1.9.7_(3.14.5 HBRT)
[parking_perception-3] [INFO] [1659394017.247423580] [dnn]: The model input 0 width is 640 and height is 320
[parking_perception-3] [INFO] [1659394017.247664997] [dnn]: Task init.
[parking_perception-3] [INFO] [1659394017.255848788] [dnn]: Set task_num [2]
[parking_perception-3] [INFO] [1659394017.255999663] [parking_perception]: The model input width is 640 and height is 320
[parking_perception-3] [INFO] [1659394017.263431163] [parking_perception]: msg_pub_topic_name: ai_msg_parking_perception
[parking_perception-3] [INFO] [1659394017.263554788] [parking_perception]: Detect images that use subscriptions
[parking_perception-3] [WARN] [1659394017.263597997] [parking_perception]: Create hbmem_subscription with topic_name: /hbmem_img
[parking_perception-3] [WARN] [1659394017.267204163] [parking_perception]: start success!!!
[parking_perception-3] [WARN] [1662036456.219133588] [parking_perception]: input fps: 29.73, out fps: 29.79
[parking_perception-3] [WARN] [1662036457.228303881] [parking_perception]: input fps: 29.73, out fps: 29.73
[parking_perception-3] [WARN] [1662036458.237841548] [parking_perception]: input fps: 29.73, out fps: 29.73
使用单张回灌图片
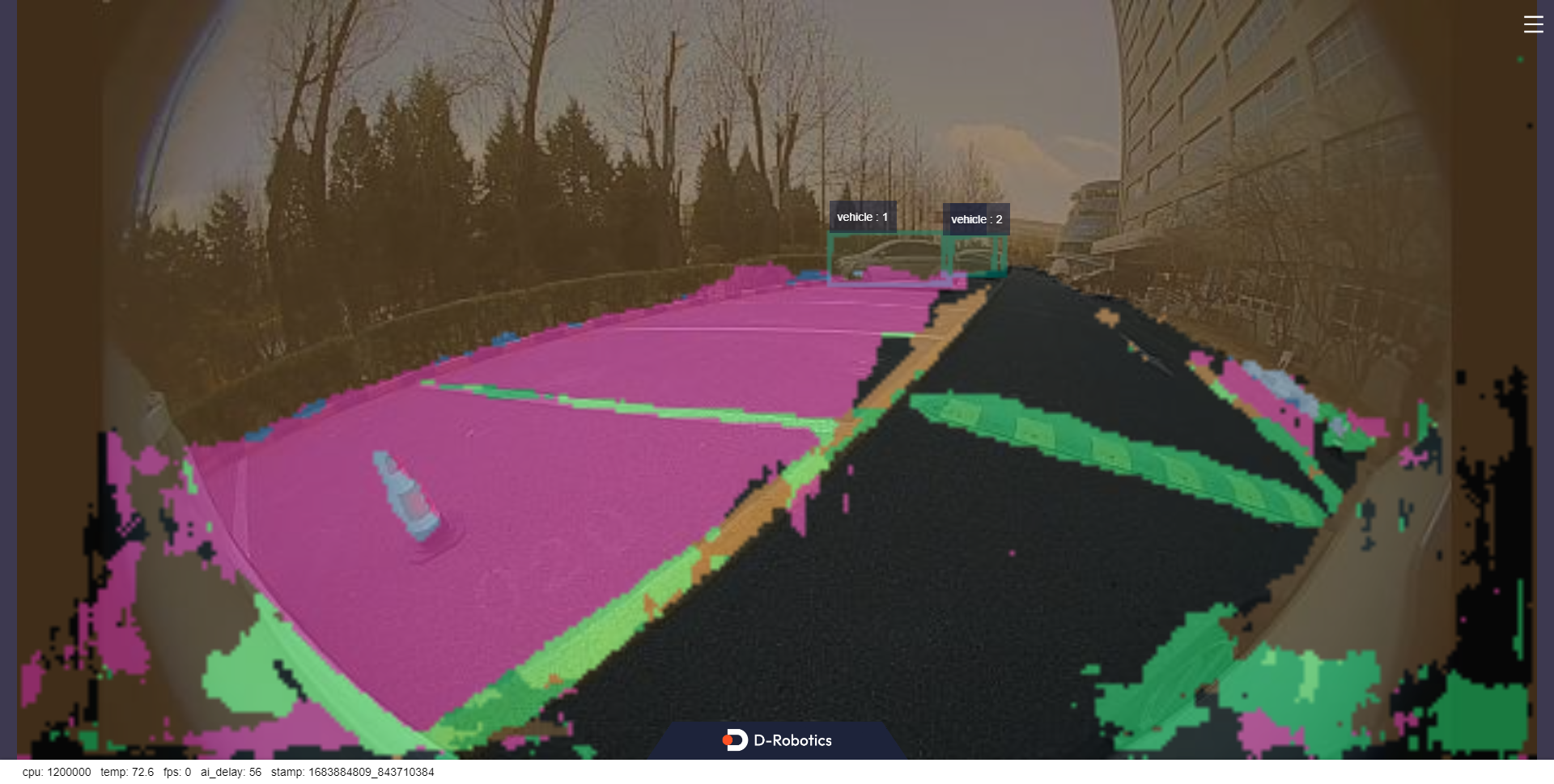
示例中读取本地图片推理的结果会渲染到图片上,在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址),打开界面右上角设置。

选中”全图分割“选项,可以显示渲染效果。

可视化结果可以看到,室外场景下停车区域与行车区域有效分割开,区分了停车车道线和行车车道线,同时目标检测任务定位到远处车辆。
"dump_render_img"设置为"1"时,渲染效果保存在当前路径的result目录下。