BEV感知算法
功能介绍
BEV感知算法是使用OpenExplorer在nuscenes数据集上训练出来的BEV多任务模型。
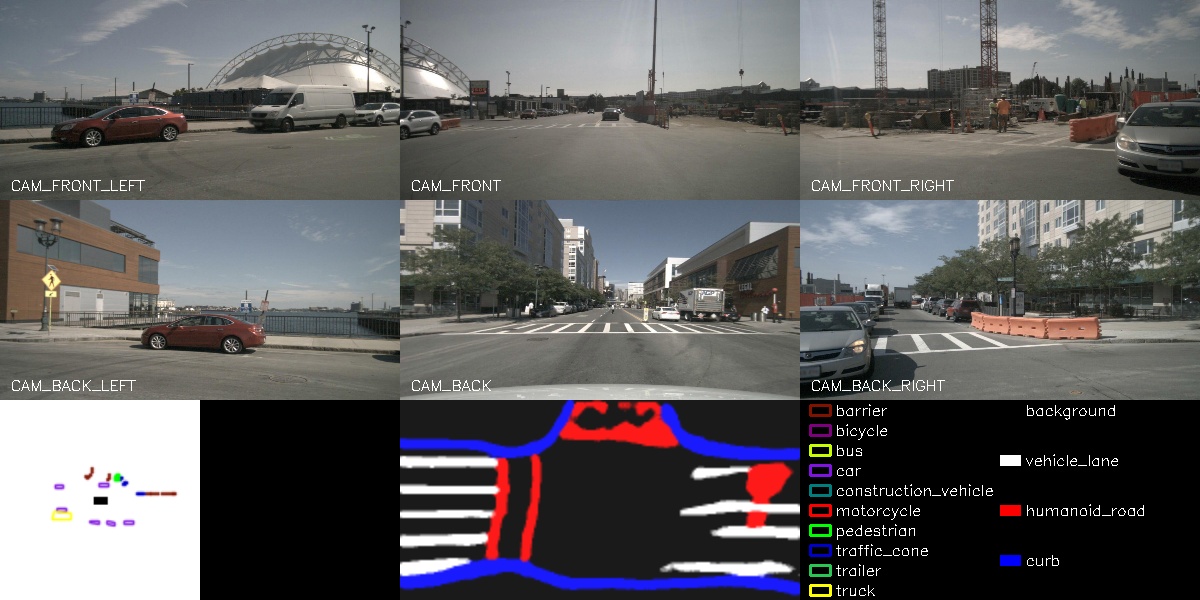
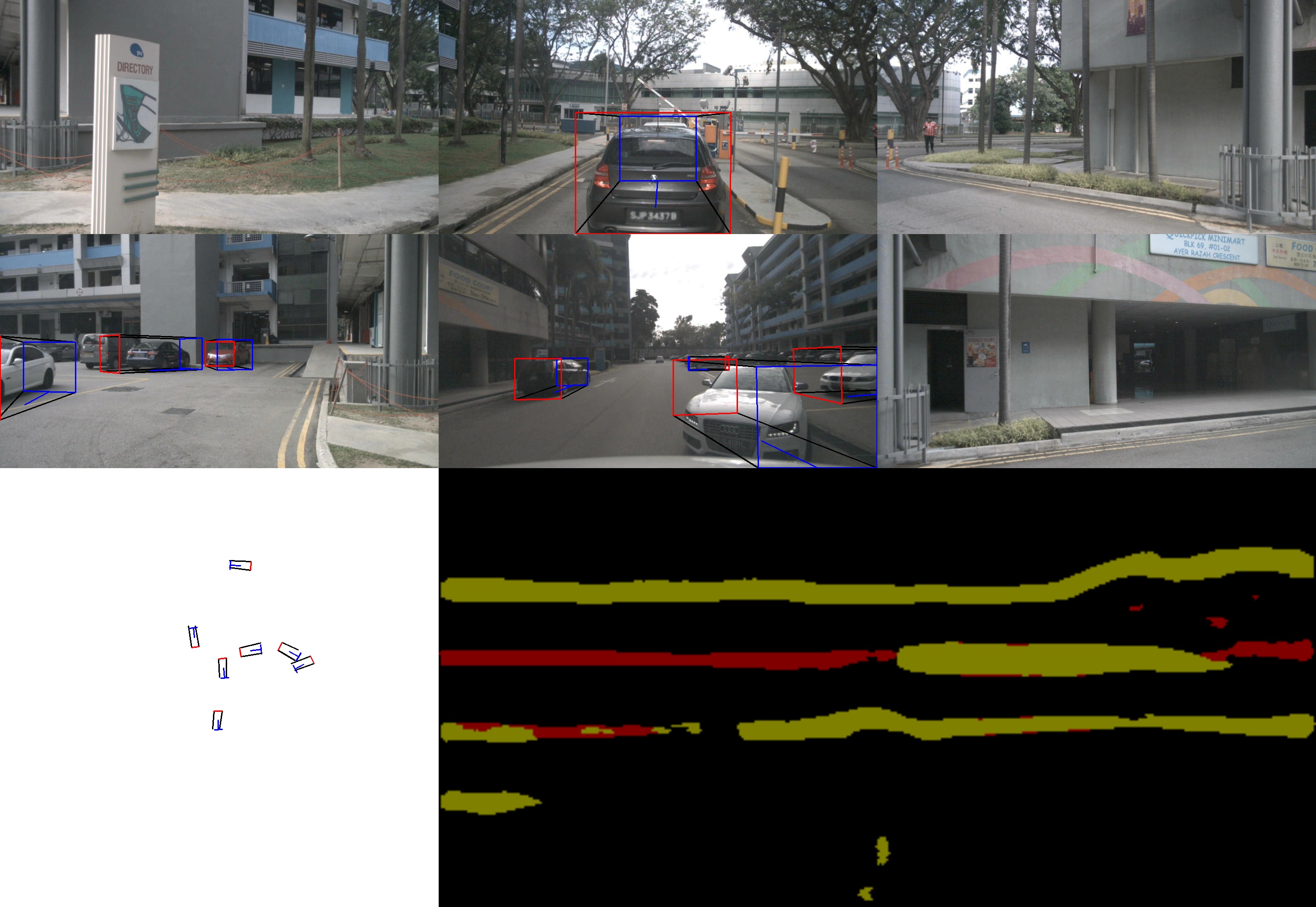
算法输入为6组图像数据,分别是前视,左前,右前,后视,左后,右后图。模型输出为10个类别的目标以及对应的3D检测框,包括障碍物、多种类型车辆、交通标志等,以及车道线、人行道、马路边缘的语义分割。
此示例使用本地图像数据作为输入,利用BPU进行算法推理,发布算法感知结果渲染的图片消息,在PC端浏览器上渲染显示算法结果。
代码仓库: (https://github.com/D-Robotics/hobot_bev.git)
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK Ultra | Ubuntu 20.04 (Foxy) | 使用本地回灌,并通过web展示推理渲染结果 |
| RDK S100 | Ubuntu 22.04 (Humble) | 使用本地回灌,并通过web展示推理渲染结果 |
准备工作
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
确认PC机能够通过网络访问RDK。
使用介绍
使用本地数据集回灌
使用本地数据集回灌,经过推理后发布算法结果渲染后的图片消息,通过websocket package实现在PC端浏览器上渲染显示发布的图片和对应的算法结果。
准备回灌数据集
- Foxy
- Humble
# 板端下载数据集
wget http://archive.d-robotics.cc/TogetheROS/data/hobot_bev_data.tar.gz
# 解压缩
mkdir -p hobot_bev_data
tar -zxvf hobot_bev_data.tar.gz -C hobot_bev_data
# 解压完成后数据集在hobot_bev_data/data路径下
# 板端下载数据集
cd ~
wget http://archive.d-robotics.cc/TogetheROS/data/nuscenes_bev_val/nuscenes_bev_val.tar.gz
# 解压缩
mkdir -p ~/hobot_bev_data
tar -zxvf ~/nuscenes_bev_val.tar.gz -C ~/hobot_bev_data
使用数据集回灌
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 启动websocket服务
ros2 launch websocket websocket_service.launch.py
# 启动运行脚本,并指定数据集路径
ros2 launch hobot_bev hobot_bev.launch.py image_pre_path:=hobot_bev_data/data
# 配置tros.b humble环境
source /opt/tros/humble/setup.bash
if [ -L qat ]; then rm qat; fi
ln -s `ros2 pkg prefix hobot_bev`/lib/hobot_bev/qat/ qat
ln -s ~/hobot_bev_data/nuscenes_bev_val nuscenes_bev_val
# 启动运行脚本
ros2 launch hobot_bev hobot_bev.launch.py
结果分析
在运行终端输出如下信息:
- Foxy
- Humble
[INFO] [launch]: All log files can be found below /root/.ros/log/2023-07-05-17-47-07-232907-hobot-2627970
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [hobot_bev-1]: process started with pid [2627972]
[INFO] [websocket-2]: process started with pid [2627974]
[hobot_bev-1] [WARN] [1688579227.907268364] [bev_node]:
[hobot_bev-1] image_pre_path: hobot_bev_data/data
[hobot_bev-1] [BPU_PLAT]BPU Platform Version(1.3.3)!
[hobot_bev-1] [HBRT] set log level as 0. version = 3.14.25.0
[hobot_bev-1] [DNN] Runtime version = 1.12.3_(3.14.25 HBRT)
[hobot_bev-1] [WARN] [1688579228.714778531] [dnn]: Run default SetOutputParser.
[hobot_bev-1] [WARN] [1688579228.714925489] [dnn]: Set output parser with default dnn node parser, you will get all output tensors and should parse output_tensors in PostProcess.
[hobot_bev-1] [WARN] [1688579228.886846489] [bev_node]: loop 0/1002
[hobot_bev-1] [WARN] [1688579229.474568573] [bev_node]: loop 1/1002
[hobot_bev-1] [WARN] [1688579230.058551781] [bev_node]: loop 2/1002
[hobot_bev-1] [WARN] [1688579230.691667198] [bev_node]: loop 3/1002
[hobot_bev-1] [WARN] [1688579231.324658782] [bev_node]: loop 4/1002
[hobot_bev-1] [WARN] [1688579231.365145532] [bev_node]: input fps: 2.47, out fps: 2.52, infer time ms: 12, post process time ms: 659
[hobot_bev-1] [WARN] [1688579231.915645741] [bev_node]: loop 5/1002
[hobot_bev-1] [WARN] [1688579231.996993824] [bev_node]: input fps: 2.47, out fps: 2.52, infer time ms: 12, post process time ms: 658
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-08-09-44-40-838952-ubuntu-20037
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [hobot_bev-1]: process started with pid [20040]
[INFO] [websocket-2]: process started with pid [20042]
[hobot_bev-1] [UCP]: log level = 3
[hobot_bev-1] [UCP]: UCP version = 3.3.3
[hobot_bev-1] [VP]: log level = 3
[hobot_bev-1] [DNN]: log level = 3
[hobot_bev-1] [HPL]: log level = 3
[websocket-2] [WARN] [1746668681.078783258] [websocket]:
[websocket-2] Parameter:
[websocket-2] image_topic: /image_jpeg
[websocket-2] image_type: mjpeg
[websocket-2] only_show_image: 1
[websocket-2] output_fps: 0
[websocket-2] [INFO] [1746668681.079077507] [websocket]: Websocket using image mjpeg
[hobot_bev-1] [UCPT]: log level = 6
[hobot_bev-1] [DSP]: log level = 3
[hobot_bev-1] [INFO] [1746668681.182092730] [bev_node]: BevNode init
[hobot_bev-1] [WARN] [1746668681.182327429] [bev_node]:
[hobot_bev-1] topic_name: image_jpeg
[hobot_bev-1] save_image: false
[hobot_bev-1] glog_level: 1
[hobot_bev-1] [WARN] [1746668681.186660916] [ai_wrapper]:
[hobot_bev-1] Set glog level in cmd line with '--glog_level=$num'
[hobot_bev-1] EXAMPLE_SYSTEM = 0, EXAMPLE_REPORT = 1, EXAMPLE_DETAIL = 2, EXAMPLE_DEBUG = 3
[hobot_bev-1] [BPU][[BPU_MONITOR]][281473498852256][INFO]BPULib verison(2, 1, 2)[0d3f195]!
[hobot_bev-1] [DNN] HBTL_EXT_DNN log level:6
[hobot_bev-1] [DNN]: 3.3.3_(4.1.17 HBRT)
[hobot_bev-1] [INFO] [1746668681.944706857] [bev_node]: Get render imgs size: 8, frame_id: 0, duration ms infer: 12.52, postp: 3.37, prep: 0.00
[hobot_bev-1] [INFO] [1746668681.997575564] [bev_node]: Publish ros compressed image msg, format: jpeg, topic: image_jpeg
在PC端的浏览器输入http://IP:8000即可查看图像和算法渲染效果(IP为RDK的IP地址):
- Foxy
- Humble