人手关键点检测
功能介绍
人手关键点检测算法示例订阅图片和包含人手框信息的智能msg,利用BPU进行算法推理,发布包含人手关键点信息的算法msg。
人手关键点索引如下图:

代码仓库:
(https://github.com/D-Robotics/hand_lmk_detection)
(https://github.com/D-Robotics/mono2d_body_detection)
应用场景:人手关键点检测算法主要用于捕捉人手部的骨骼关键点,可实现自定义手势识别等功能,主要应用于智能家居、虚拟现实、游戏娱乐等领域。
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK X3, RDK X3 Module | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) | 启动MIPI/USB摄像头,并通过Web展示推理渲染结果 |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | 启动MIPI/USB摄像头,并通过Web展示推理渲染结果 |
| RDK Ultra | Ubuntu 20.04 (Foxy) | 启动MIPI/USB摄像头,并通过web展示推理渲染结果 |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
RDK已安装MIPI或者USB摄像头。
-
确认PC机能够通过网络访问RDK。
使用介绍
人手关键点检测(hand_lmk_detection)package订阅sensor package发布的图片以及人体检测和跟踪package发布的人手框检测结果,经过推理后发布算法msg,通过websocket package实现在PC端浏览器上渲染显示发布的图片和对应的算法结果。
使用MIPI摄像头发布图片
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_lmk_detection/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch hand_lmk_detection hand_lmk_detection.launch.py
使用USB摄像头发布图片
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_lmk_detection/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch hand_lmk_detection hand_lmk_detection.launch.py
结果分析
在运行终端输出如下信息:
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[hand_lmk_detection-4] [WARN] [1660269063.553205182] [hand_lmk_det]: input fps: 31.43, out fps: 31.47
[hand_lmk_detection-4] [WARN] [1660269064.579457516] [hand_lmk_det]: input fps: 30.21, out fps: 30.21
[hand_lmk_detection-4] [WARN] [1660269065.612579058] [hand_lmk_det]: input fps: 30.01, out fps: 30.01
[hand_lmk_detection-4] [WARN] [1660269066.612778892] [hand_lmk_det]: input fps: 30.00, out fps: 30.00
[hand_lmk_detection-4] [WARN] [1660269067.646101309] [hand_lmk_det]: input fps: 30.01, out fps: 30.01
[hand_lmk_detection-4] [WARN] [1660269068.679036184] [hand_lmk_det]: input fps: 30.04, out fps: 30.04
输出log显示,程序运行成功,推理时算法输入和输出帧率为30fps,每秒钟刷新一次统计帧率。
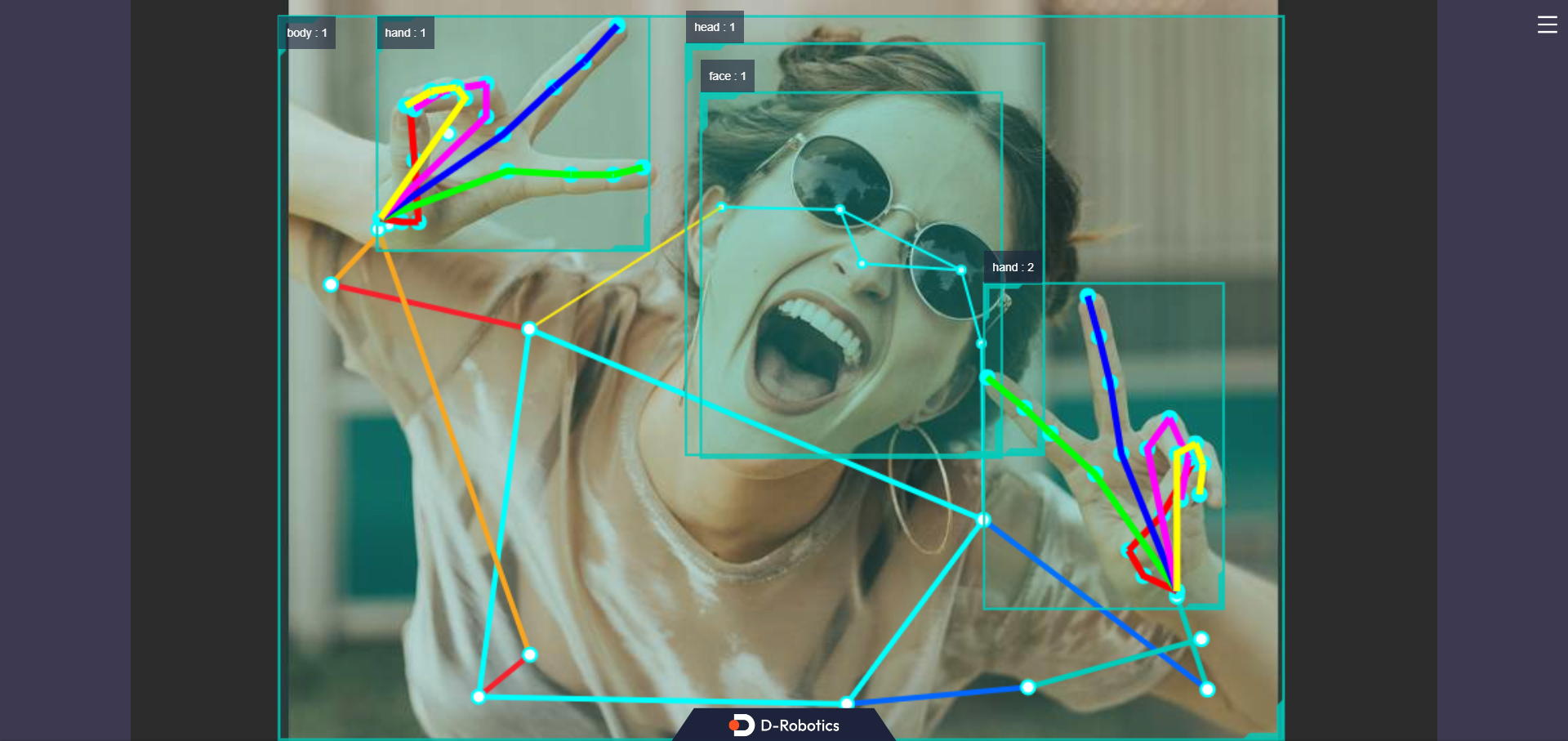
在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址):