激光雷达目标检测算法
功能介绍
激光雷达目标检测算法是使用OpenExplorer在nuscenes数据集上训练出来的CenterPoint算法模型。
算法输入为32线激光雷达点云数据,输出信息包括目标的3D检测框、置信度、类别。支持的目标检测类型包括car、truck、bus、barrier、motorcycle、pedestrian共六大类别。
此示例使用本地激光雷达点云文件作为输入,利用BPU进行算法推理,发布包含点云数据、目标检测框和朝向的渲染图片消息,在PC端浏览器上渲染显示算法结果。
代码仓库: (https://github.com/D-Robotics/hobot_centerpoint)
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK Ultra | Ubuntu 20.04 (Foxy) | 使用本地回灌,并通过web展示推理渲染结果 |
| RDK S100 | Ubuntu 22.04 (Humble) | 使用本地回灌,并通过web展示推理渲染结果 |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
确认PC机能够通过网络访问RDK。
使用介绍
RDK平台
使用本地点云文件回灌
激光雷达物体检测算法示例使用激光雷达点云文件回灌,经过推理后将算法结果渲染后的图片msg,通过websocket package实现在PC端浏览器上渲染显示发布的图片和对应的算法结果。
准备激光雷达点云文件:
- Foxy
- Humble
# 板端下载回灌的点云文件
wget http://archive.d-robotics.cc/TogetheROS/data/hobot_centerpoint_data.tar.gz
# 解压缩
mkdir config
tar -zxvf hobot_centerpoint_data.tar.gz -C config
# 解压完成后数据在config/hobot_centerpoint_data路径下
# 板端下载回灌的点云文件
cd ~
wget http://sunrise.horizon.cc/TogetheROS/data/hobot_centerpoint_data.tar.gz
# 解压缩
mkdir -p ~/centerpoint_data
tar -zxvf ~/hobot_centerpoint_data.tar.gz -C ~/centerpoint_data
启动算法示例:
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 启动websocket服务
ros2 launch websocket websocket_service.launch.py
# 启动launch文件
ros2 launch hobot_centerpoint hobot_centerpoint_websocket.launch.py lidar_pre_path:=config/hobot_centerpoint_data
# 配置tros.b humble环境
source /opt/tros/humble/setup.bash
if [ -L qat ]; then rm qat; fi
ln -s `ros2 pkg prefix hobot_centerpoint`/lib/hobot_centerpoint/qat/ qat
ln -s ~/centerpoint_data centerpoint_data
# 启动launch文件
ros2 launch hobot_centerpoint hobot_centerpoint.launch.py
结果分析
启动算法示例后在运行终端输出如下信息:
- Foxy
- Humble
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [hobot_centerpoint-1]: process started with pid [22470]
[INFO] [websocket-2]: process started with pid [22472]
[hobot_centerpoint-1] [WARN] [0948485758.916907430] [centerpoint_node]:
[hobot_centerpoint-1] preprocess_config: config/centerpoint_preprocess_5dim.json
[hobot_centerpoint-1] model_file: config/model/model.hbm
[hobot_centerpoint-1] lidar_list_file: ./config/nuscenes_lidar_val.lst
[hobot_centerpoint-1] is_show: 1
[hobot_centerpoint-1] is_loop: 1
[hobot_centerpoint-1] pub_topic_name: /hobot_centerpoint
[hobot_centerpoint-1] lidar_pre_path: ./config/hobot_centerpoint_data
[hobot_centerpoint-1] [BPU_PLAT]BPU Platform Version(1.3.3)!
[hobot_centerpoint-1] [HBRT] set log level as 0. version = 3.14.25.0
[hobot_centerpoint-1] [DNN] Runtime version = 1.12.3_(3.14.25 HBRT)
[hobot_centerpoint-1] [WARN] [0948485759.205674972] [dnn]: Run default SetOutputParser.
[hobot_centerpoint-1] [WARN] [0948485759.205820889] [dnn]: Set output parser with default dnn node parser, you will get all output tensors and should parse output_tensors in PostProcess.
[hobot_centerpoint-1] [WARN] [0948485759.208895472] [hobot_centerpoint]: A total of 81 files were fetched!
[hobot_centerpoint-1] [WARN] [0948485759.400904472] [CenterPoint_Node]: input fps: -1.00, out fps: -1.00, infer time ms: 61, post process time ms: 57
[hobot_centerpoint-1] [WARN] [0948485759.839328014] [CenterPoint_Node]: input fps: -1.00, out fps: -1.00, infer time ms: 27, post process time ms: 53
[hobot_centerpoint-1] [WARN] [0948485760.281992264] [CenterPoint_Node]: input fps: -1.00, out fps: -1.00, infer time ms: 28, post process time ms: 53
[hobot_centerpoint-1] [WARN] [0948485760.731948223] [CenterPoint_Node]: input fps: 2.93, out fps: 3.01, infer time ms: 27, post process time ms: 56
[hobot_centerpoint-1] [WARN] [0948485761.155906223] [CenterPoint_Node]: input fps: 2.93, out fps: 3.01, infer time ms: 28, post process time ms: 56
[hobot_centerpoint-1] [WARN] [0948485761.572980640] [CenterPoint_Node]: input fps: 2.93, out fps: 3.01, infer time ms: 27, post process time ms: 53
[hobot_centerpoint-1] [WARN] [0948485761.983718973] [CenterPoint_Node]: input fps: 2.40, out fps: 2.40, infer time ms: 28, post process time ms: 55
[hobot_centerpoint-1] [WARN] [0948485762.396930973] [CenterPoint_Node]: input fps: 2.40, out fps: 2.40, infer time ms: 28, post process time ms: 55
[hobot_centerpoint-1] [WARN] [0948485762.816782057] [CenterPoint_Node]: input fps: 2.40, out fps: 2.40, infer time ms: 27, post process time ms: 56
[hobot_centerpoint-1] [WARN] [0948485763.239294099] [CenterPoint_Node]: input fps: 2.39, out fps: 2.39, infer time ms: 27, post process time ms: 57
[hobot_centerpoint-1] [WARN] [0948485763.661555807] [CenterPoint_Node]: input fps: 2.39, out fps: 2.39, infer time ms: 27, post process time ms: 57
[hobot_centerpoint-1] [WARN] [0948485764.084410183] [CenterPoint_Node]: input fps: 2.39, out fps: 2.39, infer time ms: 27, post process time ms: 57
[hobot_centerpoint-1] [WARN] [0948485764.502788849] [CenterPoint_Node]: input fps: 2.37, out fps: 2.37, infer time ms: 27, post process time ms: 55
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-08-10-05-16-060526-ubuntu-20968
[INFO] [launch]: Default logging verbosity is set to INFO
webserver has launch
[INFO] [hobot_centerpoint-1]: process started with pid [20971]
[INFO] [websocket-2]: process started with pid [20973]
[hobot_centerpoint-1] [UCP]: log level = 3
[hobot_centerpoint-1] [UCP]: UCP version = 3.3.3
[hobot_centerpoint-1] [VP]: log level = 3
[hobot_centerpoint-1] [DNN]: log level = 3
[hobot_centerpoint-1] [HPL]: log level = 3
[websocket-2] [WARN] [1746669916.389039854] [websocket]:
[websocket-2] Parameter:
[websocket-2] image_topic: /image_jpeg
[websocket-2] image_type: mjpeg
[websocket-2] only_show_image: 1
[websocket-2] output_fps: 0
[websocket-2] [INFO] [1746669916.389302684] [websocket]: Websocket using image mjpeg
[hobot_centerpoint-1] [UCPT]: log level = 6
[hobot_centerpoint-1] [DSP]: log level = 3
[hobot_centerpoint-1] [INFO] [1746669916.477961938] [centerpoint_node]: CenterPointNode init
[hobot_centerpoint-1] [WARN] [1746669916.478312520] [centerpoint_node]:
[hobot_centerpoint-1] topic_name: image_jpeg
[hobot_centerpoint-1] save_image: false
[hobot_centerpoint-1] glog_level: 1
[hobot_centerpoint-1] [WARN] [1746669916.482928131] [ai_wrapper]:
[hobot_centerpoint-1] Set glog level in cmd line with '--glog_level=$num'
[hobot_centerpoint-1] EXAMPLE_SYSTEM = 0, EXAMPLE_REPORT = 1, EXAMPLE_DETAIL = 2, EXAMPLE_DEBUG = 3
[hobot_centerpoint-1] [BPU][[BPU_MONITOR]][281473110813600][INFO]BPULib verison(2, 1, 2)[0d3f195]!
[hobot_centerpoint-1] [DNN] HBTL_EXT_DNN log level:6
[hobot_centerpoint-1] [DNN]: 3.3.3_(4.1.17 HBRT)
[hobot_centerpoint-1] [INFO] [1746669917.244757440] [centerpoint_node]: Get render imgs size: 1, frame_id: 0, duration ms infer: 46.38, postp: 9.55, prep: 16.01
[hobot_centerpoint-1] [INFO] [1746669917.264258828] [centerpoint_node]: Publish ros compressed image msg, format: jpeg, topic: image_jpeg
输出log显示,发布算法推理结果的topic为/hobot_centerpoint, 获取的回灌点云文件为81个。算法经过推理,后处理(包含推理结果的渲染和发布),帧率约为2.4fps。
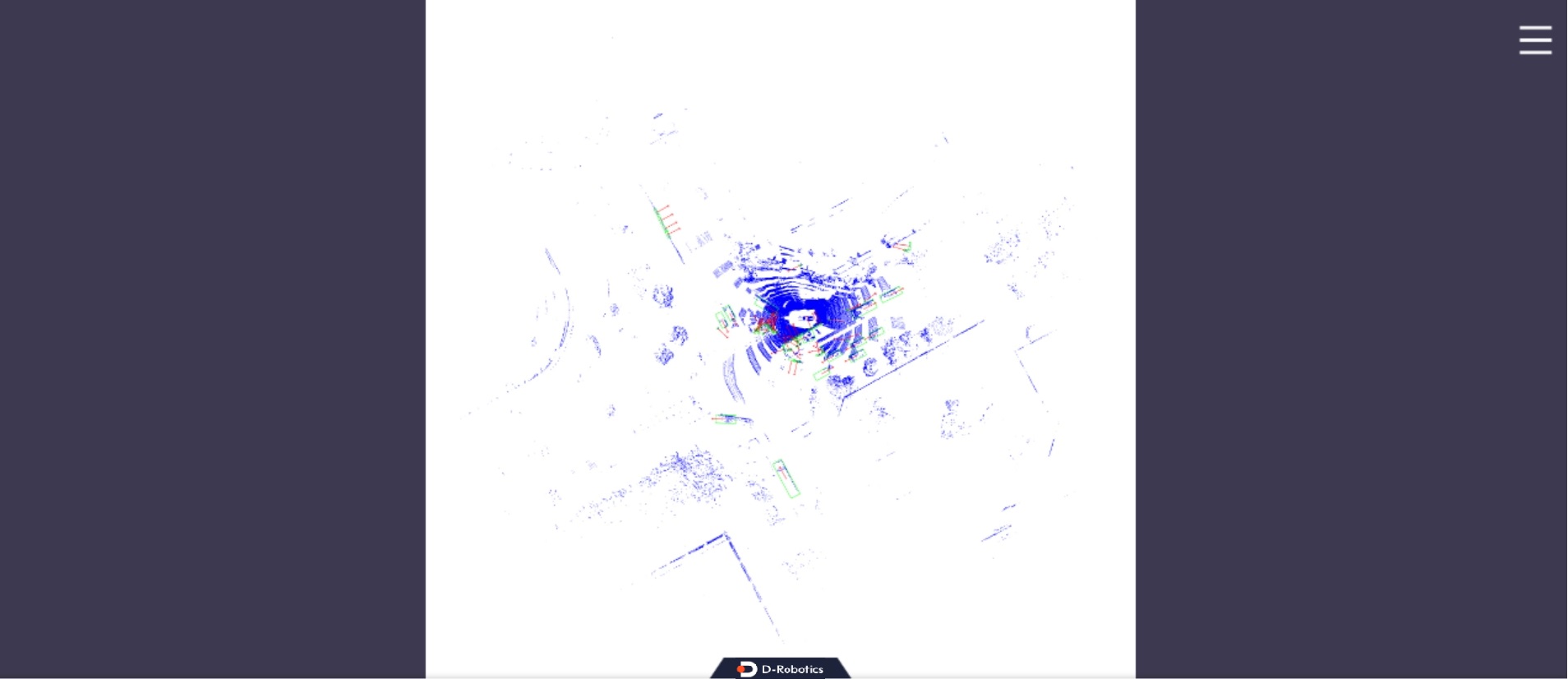
在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址):