5.4.1 SLAM建图
功能介绍
SLAM指即时定位与地图构建(Simultaneous Localization and Mapping,简称SLAM)。 本章节使用ROS2的SLAM-Toolbox作为建图算法,在Gazebo中控制小车行驶建立地图,并通过Rviz2观察建图效果。 其中SLAM-Toolbox运行在RDK上,Gazebo和Rviz2运行在与RDK同一网段的PC上。
支持平台
| 平台 | 运行方式 |
|---|---|
| RDK X3, RDK X3 Module, | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) |
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) |
| RDK Ultra | Ubuntu 20.04 (Foxy) |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
tros.b成功安装后,安装SLAM-Toolbox
- Foxy
- Humble
sudo apt-get install ros-foxy-slam-toolbox
sudo apt-get install ros-humble-slam-toolbox
如果安装失败,并且报错如下:
The following packages have unmet dependencies:
ros-foxy-slam-toolbox : Depends: ros-foxy-nav2-map-server but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
请执行以下命令后再安装:
apt update
sudo apt install libwebp6=0.6.1-2ubuntu0.20.04.3
如果sudo apt update命令执行失败或报错,请查看常见问题章节的Q10: apt update 命令执行失败或报错如何处理?解决。
- 和RDK在同一网段的PC,PC已安装Ubuntu 20.04/Ubuntu 22.04系统、ROS2桌面版和仿真环境Gazebo,数据可视化工具Rviz2。
- Foxy
- Humble
- Ubuntu 20.04系统和ROS2 Foxy桌面版
- PC的ROS2安装成功后安装Gazebo和Turtlebot3相关的功能包,安装方法为:
sudo apt-get install ros-foxy-gazebo-*
sudo apt install ros-foxy-turtlebot3
sudo apt install ros-foxy-turtlebot3-bringup
sudo apt install ros-foxy-turtlebot3-simulations
sudo apt install ros-foxy-teleop-twist-keyboard
- Ubuntu 22.04系统和ROS2 Humble桌面版
- PC的ROS2安装成功后安装Gazebo和Turtlebot3相关的功能包,安装方法为:
sudo apt-get install ros-humble-gazebo-*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-bringup
sudo apt install ros-humble-turtlebot3-simulations
sudo apt install ros-humble-teleop-twist-keyboard
使用介绍
RDK平台
本小节介绍如何使用RDK运行SLAM算法,并使用PC观察建图效果。
PC端启动仿真环境:
- Foxy
- Humble
source /opt/ros/foxy/setup.bash
source /opt/ros/humble/setup.bash
export TURTLEBOT3_MODEL=burger
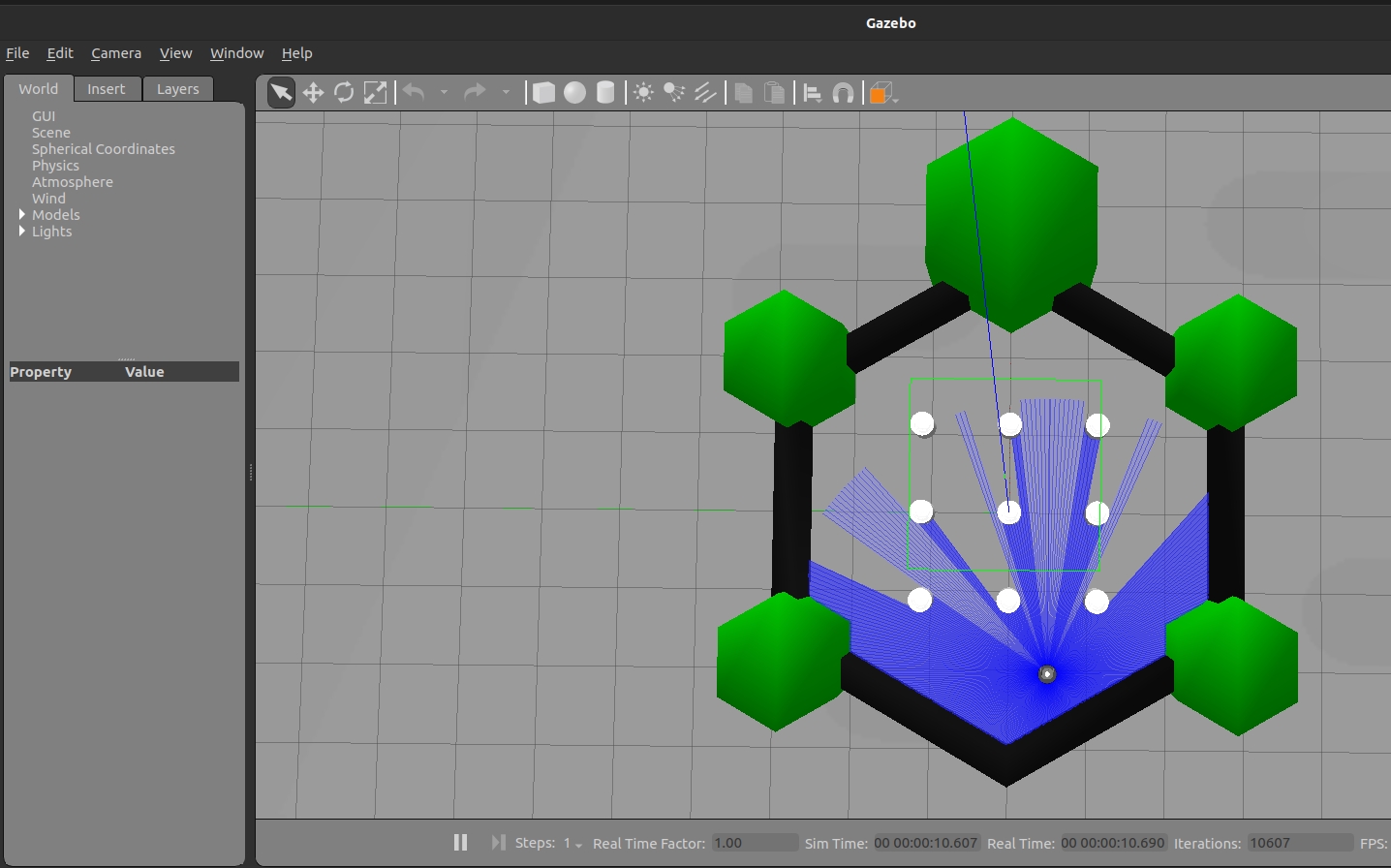
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
如果启动失败,并且报错[ERROR] [gzclient-2]: process has died,请执行命令source /usr/share/gazebo/setup.sh后再启动。
仿真环境如下图所示:
PC端��开启另外一个控制台,启动Rviz2 用于观察建图效果:
- Foxy
- Humble
source /opt/ros/foxy/setup.bash
source /opt/ros/humble/setup.bash
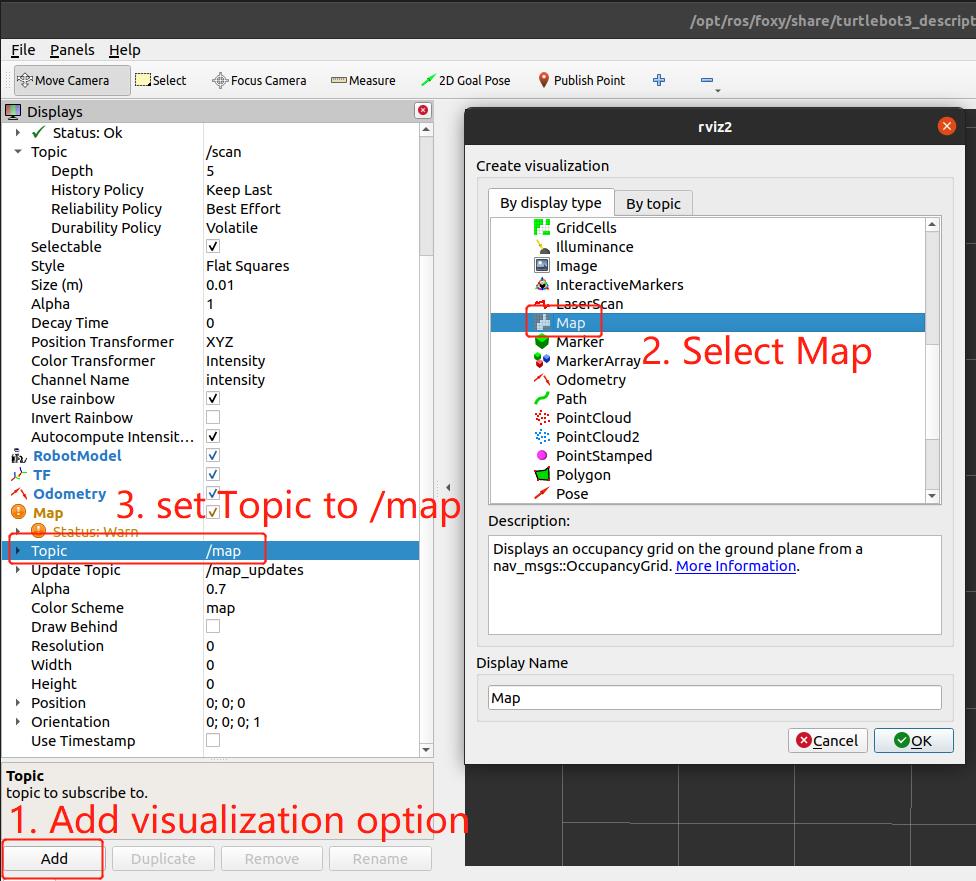
ros2 launch turtlebot3_bringup rviz2.launch.py
打开Rviz2后,需要添加“map”可视化选项,用于�展示建立的地图,步骤如下所示:
RDK板端运行SLAM-Toolbox:
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
#启动SLAM launch文件
ros2 launch slam_toolbox online_sync_launch.py
PC端开启另外一个控制台,PC端启动控制工具,通过键盘控制小车运动,控制方法见控制台打印的log,在此不再赘述:
- Foxy
- Humble
source /opt/ros/foxy/setup.bash
source /opt/ros/humble/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
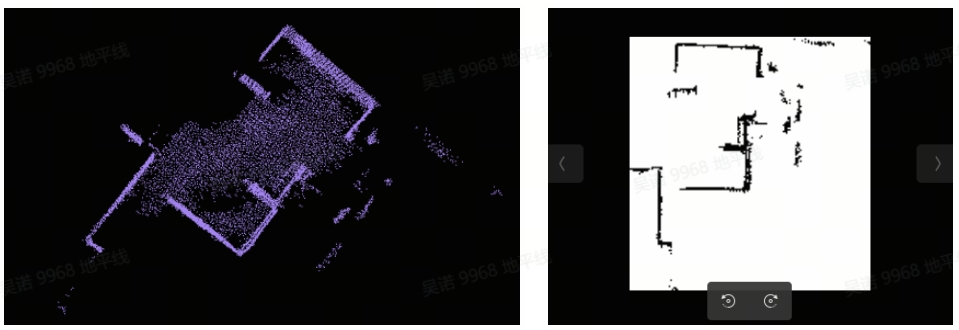
控制小车行驶,随着小车雷达探测到更多的环境信息,SLAM算法也建立起环境地图,可以在Rviz2上观察到建图效果。
结果分析
在RDK板端运行终端输出如下信息:
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-06-10-06-40-34-204213-ubuntu-5390
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [sync_slam_toolbox_node-1]: process started with pid [5392]
[sync_slam_toolbox_node-1] [INFO] [1654843239.403931058] [slam_toolbox]: Node using stack size 40000000
[sync_slam_toolbox_node-1] [INFO] [1654843240.092340814] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[sync_slam_toolbox_node-1] [INFO] [1654843240.096554433] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner.
[sync_slam_toolbox_node-1] Info: clipped range threshold to be within minimum and maximum range!
[sync_slam_toolbox_node-1] [WARN] [1654843589.431524393] [slam_toolbox]: maximum laser range setting (20.0 m) exceeds the capabilities of the used Lidar (3.5 m)
[sync_slam_toolbox_node-1] Registering sensor: [Custom Described Lidar]