5.4.9 智能盒子
功能介绍
智能盒子App功能为实现IPC视频流输入后智能分析,App由RTSP视频流、视频解码、人体人脸检测、图像编码、Web展示端组成,流程如下图:
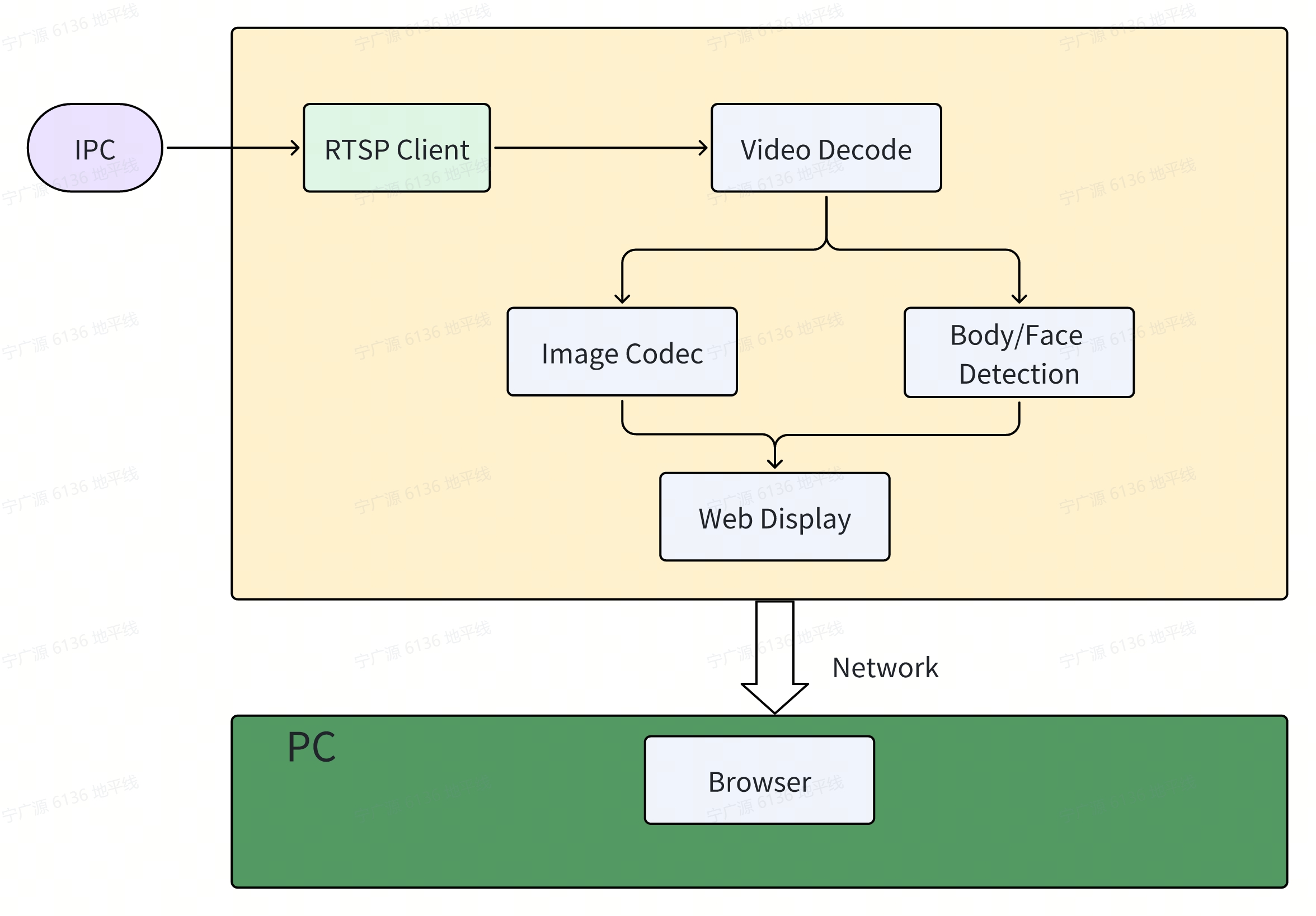
对应实际的客户应用中显示部分由客户的业务系统完成,智能盒子的主要功能由RTSP视频流、视频解码、人体人脸检测,智能结果和图像发布给客户的业务系统,流程如下图:

代码仓库: (https://github.com/D-Robotics/hobot_rtsp_client.git)
支持平台
| 平台 | 运行方式 |
|---|---|
| RDK X3, RDK X3 Module | Ubuntu 22.04 (Humble) |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) |
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) |
准备工作
-
RDK已烧录好Ubuntu 22.04系统镜像。
-
RDK安装TogetheROS.Bot参照5.1.2 apt安装与升级。
-
准备支持传输H264/H265码流RTSP协议的IPC设备,并且配置同一网段的IP地址。
-
和RDK在同一网段(有线或者连接同一无线网,IP地址前三段[192.168.1.x]需保持一致)的PC.
-
系统配置成性能模式
sudo bash -c "echo performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor"
- 启动多路时,ion_size配置成1G,请参考srpi-config配置
使用介绍
多路启动的方法
channle 1(终端1):
- Humble
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 设置不同的域
export ROS_DOMAIN_ID=101
# 从TogetheROS的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/dnn_node_example/config/ .
# 启动launch文件
ros2 launch hobot_rtsp_client hobot_rtsp_client_ai_websocket_plugin.launch.py hobot_rtsp_url_num:=1 hobot_rtsp_url_0:='rtsp://admin:admin123@10.112.148.57:554/0' hobot_transport_0:='udp' websocket_channel:=0
channle 2(终端2):
- Humble
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 设置不同的域
export ROS_DOMAIN_ID=102
# 从TogetheROS的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/dnn_node_example/config/ .
# 启动launch文件
ros2 launch hobot_rtsp_client hobot_rtsp_client_ai_websocket_plugin.launch.py hobot_rtsp_url_num:=1 hobot_rtsp_url_0:='rtsp://admin:admin123@10.112.148.58:554/0' hobot_transport_0:='udp' websocket_channel:=1
...
注意
- 不同的channel设置不同的ROS_DOMAIN_ID和websocket_channel。
- 上述展示2个通道的方法,依据相关的方法启动其他通道3~8等。
- launch脚本带"_plugin",将以component模式启动;如hobot_rtsp_client_ai_websocket_plugin.launch.py和hobot_rtsp_client_ai_plugin.launch.py
- launch脚本带"_websocket",可以实现web的浏览;如hobot_rtsp_client_ai_websocket_plugin.launch.py和hobot_rtsp_client_ai_websocket.launch.py
- 为了增加连接通道的能力,需要多视频流降帧,需要从IPC进行帧率配置。
算法模型切换
launch脚本中默认的算法引用yolov8;
请参考hobot_rtsp_client_ai_websocket_plugin.launch.py
ComposableNode(
package='dnn_node_example',
plugin='DnnExampleNode',
name='dnn_example',
parameters=[
{"config_file": 'config/yolov8workconfig.json'},
{"dump_render_img": 0},
{"feed_type": 1},
{"is_shared_mem_sub": 0},
{"msg_pub_topic_name": "/hobot_dnn_detection"}
],
extra_arguments=[{'use_intra_process_comms': True}],
)
如果引用算法yolov5,请修改config_file为"config/yolov5xworkconfig.json",参考YOLO,
结果分析
在RDK板端运行终端输出如下信息:
[hobot_codec_republish-2] [WARN] [1732169402.355433988] [hobot_codec_decoder]: Sub imgRaw fps = -1774563328
[hobot_codec_republish-2] [WARN] [1732169402.906547961] [hobot_codec_decoder]: sub h264 1920x1080, fps: 24.7706, pub nv12, fps: 9.17431, comm delay [-8.8148]ms, codec delay [171.2000]ms
[dnn_node_example-4] [WARN] [1732169402.906916796] [mono2d_body_det]: SharedMemImgProcess Recved img encoding: nv12, h: 1080, w: 1920, step: 1920, index: 2508, stamp: 1732169402_735947000, data size: 3133440, comm delay [170.9541]ms
[hobot_codec_republish-3] [WARN] [1732169403.274412126] [hobot_codec_encoder]: sub nv12 1920x1088, fps: 10.8055, pub jpeg, fps: 10.8055, comm delay [164.9091]ms, codec delay [7.6364]ms
[dnn_node_example-4] [WARN] [1732169403.321086039] [mono2d_body_det]: input fps: 10.81, out fps: 10.81, infer time ms: 92, post process time ms: 10
[hobot_codec_republish-2] [WARN] [1732169403.946849482] [hobot_codec_decoder]: sub h264 1920x1080, fps: 25, pub nv12, fps: 10.5769, comm delay [-7.0000]ms, codec delay [168.2727]ms
启另一个终端使用ros2 topic list命令可以查询到RDK的topic信息:
$ export ROS_DOMAIN_ID=101
$ ros2 topic list
/hobot_dnn_detection
/image_decode
/image_mjpeg
/parameter_events
/rosout
/rtsp_image_ch_0
其中/rtsp_image_ch_0是RDK发布的通过RTSP获取IPC视频后发布的视频,/hobot_dnn_detection
是RDK发布的包含人体检测结果的算法msg,/image_decode是RDK接收H264后解码的NV12图片,/image_mjpeg是RDK编码后的JPEG图片。
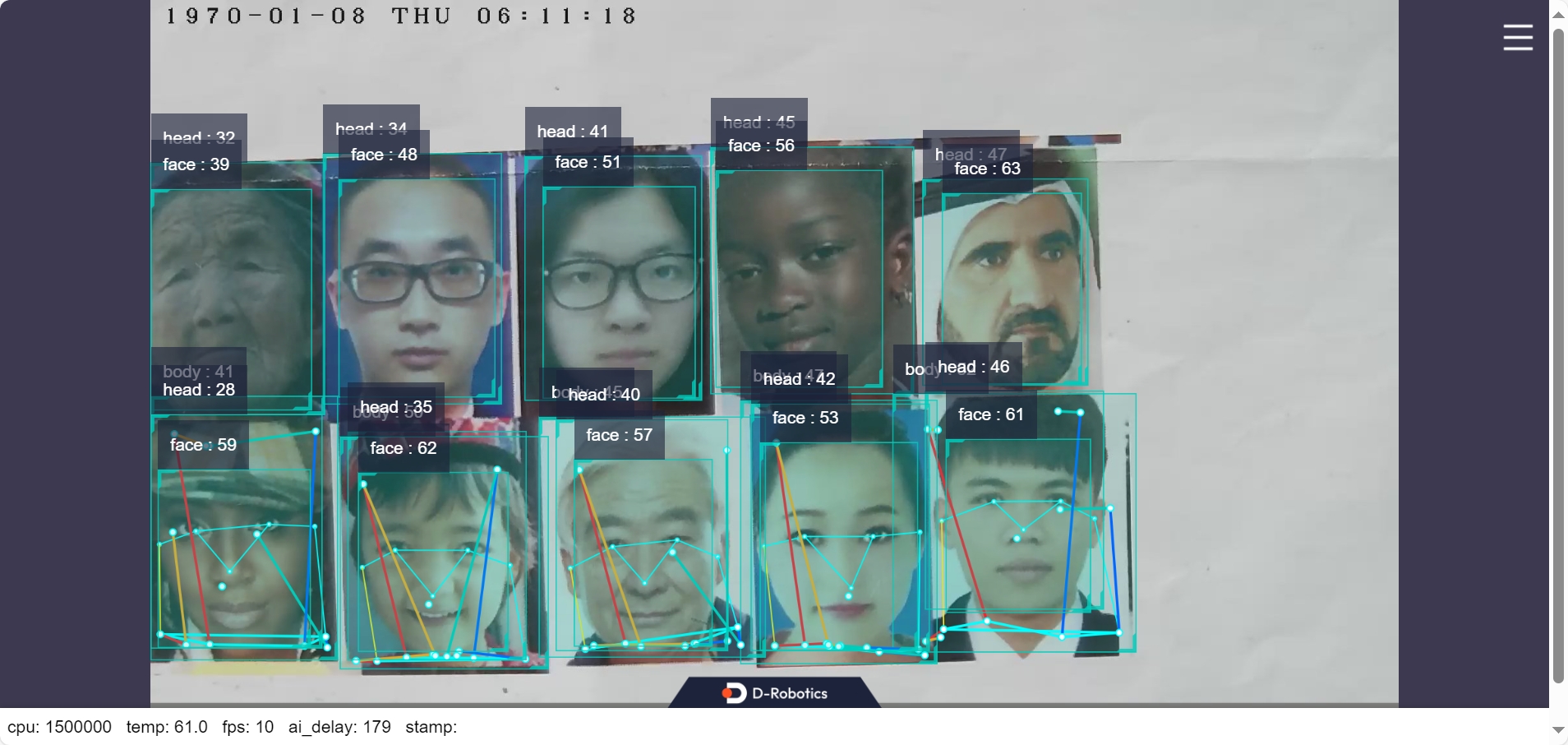
在PC端的浏览器输入http://IP:8000 ,分屏配置

人体人脸检测框,关键点和姿态检测结果在web端展示渲染效果(IP为RDK的IP地址):