5.4.5 小车手势控制
功能介绍
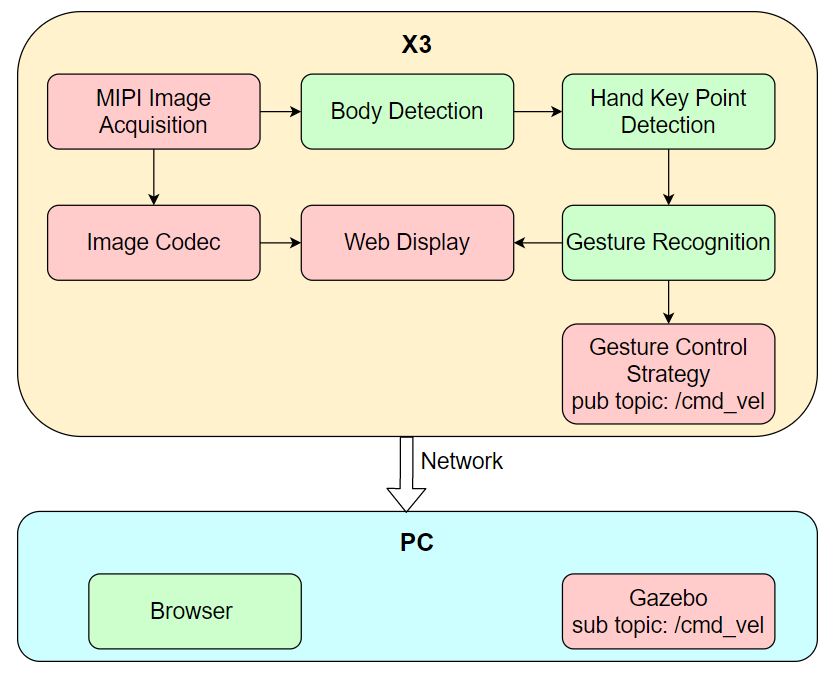
小车手势控制App功能为通过手势控制机器人小车运动,包括左右旋转和前后平移运动。App由MIPI图像采集、人体检测和跟踪、人手关键点检测、手势识别、手势控制策略、图像编解码、Web展示端组成,流程如下图:
支持的控制手势,对应的手势功能定义和手势动作举例如下:
| 控制手势 | 手势功能 | 手势动作举例 |
|---|---|---|
| 666手势/Awesome | 前进 |  |
| yeah/Victory | 后退 |  |
| 大拇指向右/ThumbRight | 右转 |  |
| 大拇指向左/ThumbLeft | 左转 |  |
App以PC端Gazebo仿真环境下的虚拟小车举例,发布的控制指令也可以直接用于控制实物小车。
代码仓库: (https://github.com/D-Robotics/gesture_control)
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK X3, RDK X3 Module | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) | 启动MIPI/USB摄像头获取图像,并进行手势识别以及手势控制,最后通过Gazebo展示控制效果 |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | 启动MIPI/USB摄像头获取图像,并进行手势识别以及手势控制,最后通过Gazebo展示控制效果 |
| RDK Ultra | Ubuntu 20.04 (Foxy) | 启动MIPI/USB摄像头获取图像,并进行手势识别以及手势控制,最后通过Gazebo展示控制效果 |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
RDK已安装MIPI或者USB摄像头。
-
和RDK在同一网段(有线或者连接同一无线网,IP地址前三段需保持一致)的PC�,PC端需要安装的环境包括:
- Foxy
- Humble
- Ubuntu 20.04系统和ROS2 Foxy桌面版
- Gazebo和Turtlebot3相关的功能包,安装方法:
sudo apt-get install ros-foxy-gazebo-*
sudo apt install ros-foxy-turtlebot3
sudo apt install ros-foxy-turtlebot3-simulations
- Ubuntu 22.04系统和ROS2 Humble桌面版
- Gazebo和Turtlebot3相关的功能包,安装方法:
sudo apt-get install ros-humble-gazebo-*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-simulations
使用介绍
RDK平台
运行小车手势控制App后,通过“666手势/Awesome”手势控制小车前进,“yeah/Victory”手势控制小车后退,“大拇指向右/ThumbRight”手势控制小车右转,“大拇指向左/ThumbLeft”手势控制小车左转。其中左转/右转分别是向人的左/右方向(大拇指的指向)转动。
App启动后可以在PC端浏览器上渲染显示sensor发布的图片和对应的算法结果(浏览器输入 http://IP:8000,IP为RDK的IP地址)。
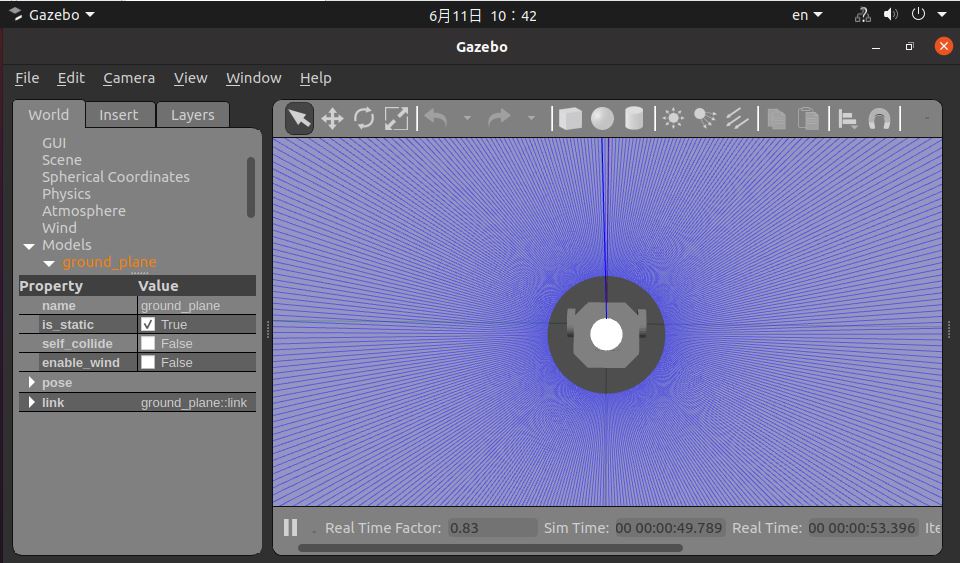
PC端启动仿真环境:
- Foxy
- Humble
source /opt/ros/foxy/setup.bash
source /opt/ros/humble/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo empty_world.launch.py
启动成功后,仿真环境中小车效果如下:
使用mipi摄像头发布图片
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_gesture_detection/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch gesture_control gesture_control.launch.py
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_gesture_detection/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch gesture_control gesture_control.launch.py
使用USB摄像头发布图片
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_gesture_detection/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch gesture_control gesture_control.launch.py
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/hand_gesture_detection/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch gesture_control gesture_control.launch.py
结果分析
在RDK运行终端输出如下信息:
[gesture_control-7] [WARN] [1652965757.159500951] [GestureControlEngine]: frame_ts_ms: 3698315358, track_id: 2, tracking_sta: 1, gesture: 14
[gesture_control-7] [WARN] [1652965757.159660358] [GestureControlEngine]: do move, direction: 0, step: 0.500000
[gesture_control-7] [WARN] [1652965757.211420964] [GestureControlEngine]: frame_ts_ms: 3698315425, track_id: 2, tracking_sta: 1, gesture: 14
[gesture_control-7] [WARN] [1652965757.211624899] [GestureControlEngine]: do move, direction: 0, step: 0.500000
[gesture_control-7] [WARN] [1652965757.232051230] [GestureControlEngine]: frame_ts_ms: 3698315457, track_id: 2, tracking_sta: 1, gesture: 14
[gesture_control-7] [WARN] [1652965757.232207513] [GestureControlEngine]: do move, direction: 0, step: 0.500000
以上log截取了一段通过手势控制小车运动的处理结果。其中tracking_sta值为1,表示处于手势控制状态,tracking_sta值为0表示识别到手势。
从时间戳frame_ts_ms: 3698315358开始通过666手势(gesture: 14)控制小车以0.5m/s的速度前进运动(do move, direction: 0, step: 0.500000)。
PC端在终端使用ros2 topic list命令可以查询到RDK的topic信息:
$ ros2 topic list
/camera_info
/cmd_vel
/hbmem_img04054242060426080500012020112713
/hobot_hand_gesture_detection
/hobot_hand_lmk_detection
/hobot_mono2d_body_detection
/image
/parameter_events
/rosout
其中/image是RDK发布的从MIPI sensor采集图像后经过JPEG格式编码的图片,/hobot_hand_gesture_detection是RDK发布的包含手势识别信息的算法msg,/cmd_vel是RDK发布的运动控制指令。
PC端在终端使用ros2 topic echo /cmd_vel命令可以查看到RDK发布的运动控制指令:
linear:
x: -0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -0.5
---
PC端仿真环境中小车按照手势动作运动,仿真小车运动效果如下: