5.4.6 语音控制小车运动
功能介绍
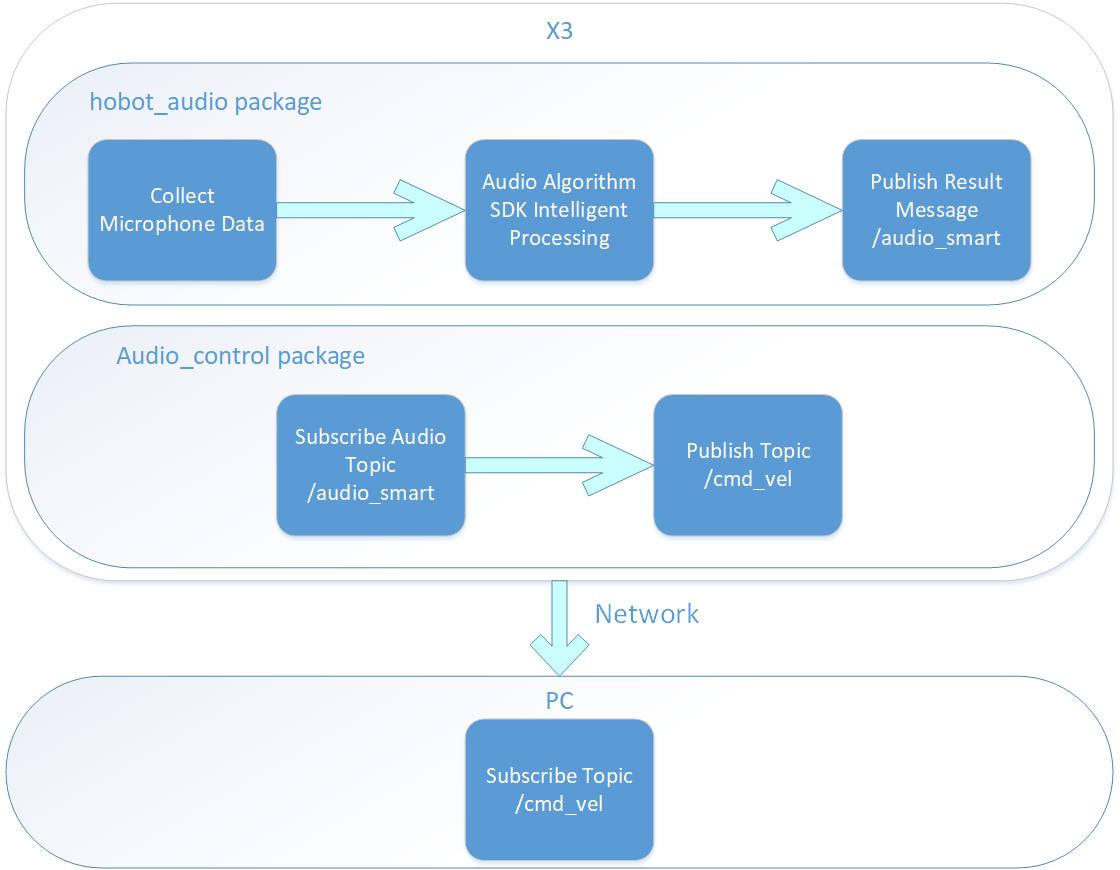
语音控制小车运动功能通过语音控制机器人向前、向后、向左、向右运动,需要搭配D-Robotics RDK机器人操作系统的智能语音模块一起使用。流程如下图:
APP以PC端Gazebo仿真环境下的虚拟小车举例,发布的控制指令也可以直接用于控制实物小车。
代码仓库: (https://github.com/D-Robotics/audio_control.git)
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK X3 | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) | 启动智能语音模块解析语音信息并进行语音控制,通过Gazebo展示控制效果 |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | 启动智能语音模块解析语音信息并进行语音控制,通过Gazebo展示控制效果 |
注意:仅支持RDK X3,RDK X3 Module暂不支持。
准备工作
RDK平台
-
RDK已烧录好Ubuntu 20.04/Ubuntu 22.04镜像。
-
RDK已成功安装TogetheROS.Bot。
-
RDK已成功安装智能语音算法包,安装命令:
- Foxy
- Humble
sudo apt update
sudo apt install tros-hobot-audiosudo apt update
sudo apt install tros-humble-hobot-audio
如果sudo apt update命令执行失败或报错,请查看常见问题章节的Q10: apt update 命令执行失败或报错如何处理?解决。
-
RDK已成功接好适配的音频板(可参考智能语音章节)。
-
和RDK在同一网段(有线或者连接同一无线网,IP地址前三段需保持一致)的PC,PC端需要安装的环境包括:
- Foxy
- Humble
- Ubuntu 20.04系统和ROS2 Foxy桌面版
- Gazebo和Turtlebot3相关的功能包,安装方法:
sudo apt-get install ros-foxy-gazebo-*
sudo apt install ros-foxy-turtlebot3
sudo apt install ros-foxy-turtlebot3-simulations
- Ubuntu 22.04系统和ROS2 Humble桌面版
- Gazebo和Turtlebot3相关的功能包,安装方法:
sudo apt-get install ros-humble-gazebo-*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-simulations
使用介绍
PC端启动仿真环境:
- Foxy
- Humble
source /opt/ros/foxy/setup.bash
source /opt/ros/humble/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo empty_world.launch.py
启动成功后,仿真环境中小车效果如下:
RDK平台启动程序:
- 拷贝音频配置文件
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/hobot_audio/config/ .
-
确认麦克风设备
麦克风设备号通过配置文件 config/audio_config.json 中
micphone_name字段设置,默认为"hw:0,0",表示音频设备Card0 Device0,设备号可通过命令ls /dev/snd查看如:"pcmC0D1c";最后字母c表示capture设备,C0表示Card0,D1表示Device1,修改参数为"hw:0,1"。 -
启动程序
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash# 配置tros.b环境
source /opt/tros/humble/setup.bash#启动launch文件
ros2 launch audio_control audio_control.launch.py程序启动成功后,可通过命令词“向前走”、“向后退”、“向左转”,“向右转”,“停止运动”控制小车运动。
结果分析
在RDK运行终端输出如下信息:
This is audio control package.
============================================
audio control usage
Wake up device is "D-Robotics 你好".
Audio control commnad word definitions are:
"向前走": move front.
"向后退": move back.
"向右转": rotate robot to right.
"向左转": rotate robot to left.
============================================
以上log截取了一段音频控制pkg启动后的输出。log内容显示,此语音控制模块配置的设备唤醒词是“D-Robotics 你好”,控制小车运动的命令词有:“向前走”、“向后退”、“向左转”,“向右转”。
PC端在终端使用ros2 topic list命令可以查询到RDK的topic信息:
$ ros2 topic list
/audio_smart
/cmd_vel
其中/audio_smart是X3发布的包含智能语音结果的算法msg,/cmd_vel是RDK发布的运动控制指令。
PC端在终端使用ros2 topic echo /cmd_vel命令可以查看到RDK发布的运动控制指令:
linear:
x: 0.30000001192092896
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: -0.30000001192092896
z: 0.0
angular:
x: 0.0
y: 0.0
z: -0.5
---
linear:
x: 0.0
y: 0.30000001192092896
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.5
---
PC端仿真环境中小车跟随语音控制命令词的指示进行运动,仿真小车运动效果如下: