D-Robotics RDK套件
本文档为 D-Robotics RDK 套件 X 系列的用户手册,为开发者提供关于RDK X3(旭日X3派)、RDK X3 Module(旭日X3模组)、RDK X5 、RDK X5 Module(旭日X5模组)、RDK Ultra等产品的使用说明和开发指导,内容涵盖硬件设计、系统定制、应用开发、算法工具链等多个方面。
相关下载资源请参考:下载资源汇总
包含系统镜像、硬件资料、工具链等全部下载资源。
欢迎用户使用,具体方法请参考系统烧录章节。
-
本文档中RDK X3均使用3.0 & 2.0版本Ubuntu操作系统,对于仍需使用旭日X3派1.0版本系统的用户,可从下述链接中获取资料:
旭日X3派用户手册
旭日X3派Ubuntu镜像,选择1.x.x 版本目录下的镜像
旭日X3派资料包 -
RDK X3 Module出厂已经烧写测试版本系统镜像,为确保使用最新版本的系统,建议参考本文档完成系统烧录章节。
用户如需确认系统版本号,可通过该命令查询 cat /etc/version, 2.1.0 及以上版本可以通过 rdkos_info 命令查看具体的版本信息。
D-Robotics RDK 套件概述
D-Robotics Developer Kits,简称 RDK 套件,是基于 D-Robotics 智能芯片打造的机器人开发者套件,套件涵盖以下硬件产品:
- RDK X3(旭日 X3 派)
- RDK X3 Module(旭日 X3 模组)
- RDK X5
- RDK Ultra
- RDK S100
搭配 TogetheROS.Bot 机器人中间件,RDK 套件可以帮助开发者快速搭建机器人原型,开展评测和验证工作。
本文将详细说明 RDK X系列套件的使用方法,包括开发环境搭建、示例教程的运行、应用程序的开发、系统镜像的定制等方面内容。无论您选择使用哪种硬件,本文所介绍的内容都将为您提供一致的使用体验。
产品介绍
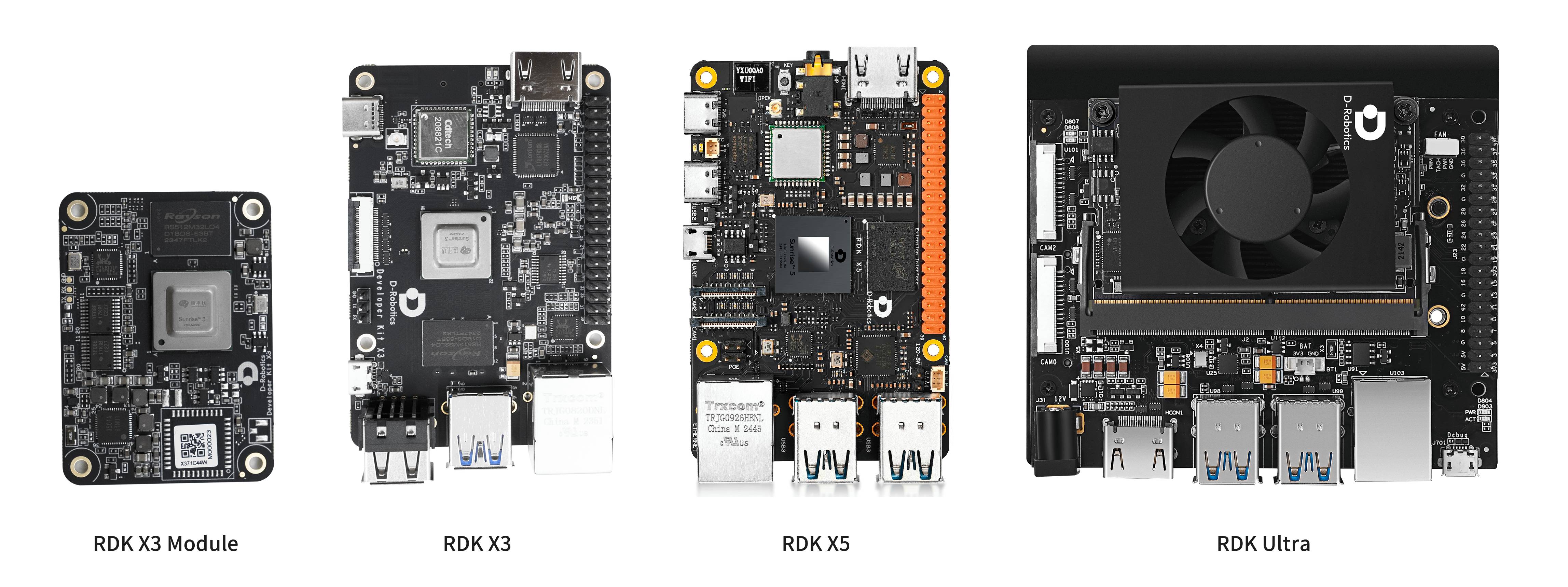
RDK X3(旭日X3派) 是一款全功能开发板,具有 5Tops 端侧推理算力。通过搭配丰富的传感器和扩展组件,为开发者提供了灵活的硬件扩展和连接选项。
RDK X3 Module(旭日X3模组) 是一款紧凑型核心模组,与 RDK X3 保持了同等规格,尺寸和接口兼容树莓派 CM4 模组。通过搭配扩展板,可以为各种应用场景提供高效的计算和通信能力。
RDK X5 是一款全功能开发板,具有 10Tops 端侧推理算力与 8 核 ARM A55 处理能力,支持 2 路 MIPI Camera 接入,4 路 USB3.0 接口。通过搭配丰富的传感器和扩展组件,为开发者提供了灵活的硬件扩展和连接选项。
RDK Ultra 是一款高性能开发套件,具有 96Tops 端侧推理算力与 8 核 ARM A55 处理能力,支持 4 路 MIPI Camera 接入,4 路 USB3.0 接口,3 路 PCIe3.0 接口,充分满足各类场景的使用需求。
工作温度与散热建议
工作温度范围
- 推荐环境温度:-20°C 至 60°C
请确保设备在此温度范围内运行,以保障其稳定性和可靠性。
芯片热特性
- 芯片最高结温:105°C
- 当芯片结温超过 95°C 时,系统将自动启动降频机制以降低温度,可能会影响性能表现。
散热设计建议
- 开发与测试阶段:建议配备散热片、RDK Case 及散热风扇等辅助散热措施。
- 产品化阶段:请根据整机热环境进行充分的热设计评估与优化,确保芯片在各种使用场景下的工作温度处于合理范围,避免因过热导致性能下降或系统异常。
文档使用指引
下面将对用户手册的整体内容划分进行介绍,帮助用户快速了解文档的结构和内容,以便更好地利用文档进行开发、学习工作。
一、快速开始
介绍系统安装,硬件接口使用的入门说明,帮助用户快速上手使用开发板。
二、系统配置
介绍一系列配置步骤和技巧,以确保系统能够正常工作并满足特定的需求,引导用户进行系统的配置,包括系统升级、网络、蓝牙的配置。
三、基础应用开发
介绍系统中预装的功能示例,如 IO 管脚控制、音视频采集,多媒体初步使用等。
四、算法应用开发
介绍Python和C++两种语言版本的算法简易接口的使用方法,此接口简单易用,方便用户快速上手,基于更底层的推理接口进行了封装,并提供基础的使用示例。
五、机器人应用开发
向机器人厂商和生态开发者推出的机器人操作系统,旨在释放机器人场景的智能潜能,助力生态开发者和商业客户能够高效、便捷的进行机器人开发,打造具有竞争力的智能机器人产品。
六、应用开发指南
包含了深度学习寻线小车、AMR开发指南,大模型应用等多方面的应用开发指南。
七、进阶开发
完整的介绍了硬件开发、系统开发、多媒体应用开发以及算法开发指南,涵盖了硬件设计,系统配置编译,多媒体使用与调试,算法训练与量化上板的开发流程,接口功能丰富,可以实现复杂、灵活的功能需求。
八、常见问题
本章节回答了用户在使用开发者套件过程中可能遇到的常见问题和疑惑。它提供了解决方案和技巧,帮助用户解决常见问题并顺利进行开发工作。
九、附录
本章节提供 RDK OS 中常用的命令用法,其中 RDK 专属命令可以帮助用户获取、查询系统的一些关键信息。
十、版本发布记录 记录了 RDK OS 的版本发布信息,包括版本号、发布日期、更新内容等,帮助用户了解系统的更新和变更。
生态项目对接支持
针对基于 RDK 平台的产品开发、行业落地或批量部署项目,地瓜机器人设立 “地瓜生态项目对接中心” 作为统一协同入口。
当您涉及以下场景时,建议通过该入口提交项目信息:
- 产品化或量产规划
- 系统架构评估与方案确认
- 模块适配与性能优化支持
- 商业项目联合开发
- 批量采购前的技术确认
提交后,我们将根据项目阶段进行分级响应,包括:
- 技术需求评估
- 方案对接与架构建议
- 模块 Owner 协同支持
- 问题闭环跟踪
- 产品路线协同沟通(如涉及)
👉 项目对接入口:
地瓜生态项目对接交流
本入口适用于明确的项目或商业落地需求。
日常技术问题建议优先通过社区问答或 FAQ 章节解决。
版本发布记录
RDK X5
注意事项:- 设备出厂说明 设备出厂时已预装匹配的最新版 miniboot 固件,为保障硬件兼容性,严禁降级刷入旧版本固件;降级操作可能导致设备无法启动。
- 固件升级指南 系统更新后,执行 rdk-miniboot-update 命令将系统镜像中的最新 miniboot 固件烧录至 NAND。
- 升级校验机制 自 hobot-miniboot_3.0.3 版本起,rdk-miniboot-update 工具自动显示当前 NAND 固件版本与目标升级版本,以降低升级风险并确保操作安全。
版本号:3.4.1
- 版本概述 (Overview) 本次更新为 RDK X5 系统的一次重要更新。底层平台软件已全面对齐并同步至最新的 X5 SDK 1.1.1。相比上一版本(基于 X5 SDK 1.0.17),此次更新重点解决了启动稳定性和媒体链路问题,并对开发文档进行了重构。
我们在完成深度的适配与系统裁剪后,将各项核心能力完整集成至 RDK OS,为开发者提供与最新 SDK 保持一致的更完善的平台支持。
- 新增功能 (New Features)
- [LCD] 新增屏幕适配: 新增对 11.9 英寸微雪宽屏 的完整驱动支持,并修复了多个屏幕型号的触摸坐标漂移/异常问题。
- [GPIO] PWM 增强: hobot-gpio 库现已支持 多路 PWM 配置,满足更复杂的电机控制需求。
- [Doc] 文档重构: 全新重写《基础应用开发》章节,补充关键概念说明,丰富了示例代码与实操演示,大幅降低上手门槛。
- 系统与媒体优化 (System & Media Improvements)
- [System] 启动稳定性增强: 针对底层 Bootloader 进行了深度优化,适配多品牌 SD/TF 卡,显著提高了冷启�动与热重启的成功率。
- [System] 音频配置优化: srpi-config 现已支持与 Ubuntu PulseAudio 通道同步切换,减少用户手动配置成本。
- [Media] 媒体链路修复: 大规模修复了 ISP、VIO、编解码模块在特定异常场景下的稳定性问题;优化了 HDMI 对多分辨率显示器的兼容性。
- TogetheROS.Bot 组件更新
- hobot_cv 修复: 修复了图像处理加速模块使用 VSE 硬件加速图像 Resize 时可能出现的 Bug。
- hobot_dnn 修复: 修正了板端模型推理框架统计“推理延迟”数值错误的问题,性能分析更准确。
- ROS 组件修复: 修复了 MIPI Cam 和算法模块 ros component so 安装路径错误导致运行时加载失败的问题。
- hobot_codec 优化: 优化了图像编解码模块配置,删除了无效参数,并新增用于 Debug 的配置项。
TROS算法升级 2.4.3 & 版本号:3.3.3
- 新增 御光-SC132GS 双目摄像头模组驱动
- srpi-config 功能增强:支持接口自动管脚复用,新增 MIPI 屏幕选择
- GPU 桌面稳定性提升
- Wi-Fi 驱动升级至 2025_0410,提升无线稳定性
- 闪连接口增强:
-
- 支持在 macOS 上使用
-
- 新增 RDK Studio 链接 U 盘功能
- hobot-dnn-rdkx5 与 hobot-vio-rdkx5 库已发布至 PyPI
- Bug 修复
TROS V2.4.3
- 单目MIPI图像采集支持启动多路图像采集。
- 双目MIPI图像采集支持sc132gs双目相机。
版本号:3.3.1
新功能
- 支持普通内核,实时内核切换;
- 支持CPU,GPU桌面切换,默认CPU桌面;
- 上电后一段时间内,根据所在地自动切换成官方源和清华源;
- 支持通过桌面来配置wifi热点;
- 支持通过桌面来配置有线网络;
- 适配新硬件X5_MD_V1P1,X5_MD_V1P0;
- rdk-miniboot-update限制烧录旧版本miniboot;
- 支持配置降频温度和关机温度;
- deb包 包含 github 提交信息;
修复
- 修复8G板卡,内存减少2G的问题,需要更新miniboot;
- 优化can通信,支持高速双向通信;
- 更正引脚电压域和驱动强度配置;
- 修复X5 MD emmc 系统无法使用rdk-backup进行备份的问题;
- 修复休眠唤醒异常;
- 修补其他系统和示例BUG;
TROS算法升级 & 版本号:3.2.3
镜像更新
- 20250610 更新ROS仓库GPG签名密钥;支持实时内核切换;集成了最新版的iniboot固件,使用rdk-miniboot-update命令烧录nand后,会释放更多内存给系统。
- 20250604 修复了配置幻尔载板系统启动失败的问题。
系统层更新
- 桌面显示优化 Ubuntu 桌面支持 3D GPU 加速渲染,视觉体验更流畅。
- 音频子板适配新增 支持 微雪 WM8960 Audio HAT 与 幻尔载板,加快语音方案集成效率。
- WIFI 驱动升级 增强弱信号环境下连接稳定性,优化休眠/唤醒过程中的自动重连机制。
- Sensor采集框架支持扩展 集成 V4L2 框架,已适配:imx477,ov5647,imx219,更多 Sensor 支持持续更新中。
- 网络与远程优化 默认切换至 iptables legacy 模式,VNC 显示流畅性提升,远程桌面不卡顿。
- 接口增强 CAN 接口稳定性优化,解决高速数据丢包问题。srpi-config 工具新增 Uart7 支持,提升串口扩展能力。
- 存储兼容性优化 提升对 SD 卡的兼容性,适配更多存储卡型号。
应用层更新
- 语音能力增强 新增 ASR 语音识别方案,语音算法开发更高效。
- 双目深度算法升级 深度估计算法优化,检测速度与精度全面提升。
- 多模态示例集成 内置端侧大模型多模态示例,3 分钟快速构建自定义应用方案。
双目算法升级 & 版本号:3.1.1
核心功能亮点:
- 系统备份 全新 rdk-backup 工具,一键备份当前系统,轻松生成可烧录镜像。rdk-backup介绍。
- 配置管理 支持使用 config.txt 配置 40pin 引脚在 U-Boot 阶段的初始化状态,提升系统启动稳定性。
- 触摸屏增强 新增双击和长按操作,长按模拟右键,屏幕控制更加灵活��。
- 设备树覆盖支持 增加 1_wire 设备树覆盖(dtoverlay)示例,为定制硬件连接提供更多选择。
- 双目算法升级 StereoNet 深度算法升级,显著提升深度效果;新增 ZED 相机支持,实现双目图像采集,搭配 StereoNet 轻松构建智能视觉系统。
- 全新应用方案:智能视频盒子 hobot_rtsp_client:支持 RTSP 拉流、解码、智能推理,并通过 Web 界面展示推理结果,快速集成边缘 AI 解决方案。
- 开放词汇检测方案:DOSOD hobot_dosod:基于地瓜自研的开放性词汇检测算法,提供端侧部署方案,让语音交互更灵活。
问题修复与优化:
- 模型导入修复:解决 efficientnasnet_m_300x300_nv12.bin 模型导入异常问题。
- 兼容性提升:优化 SD 卡协议支持,提升兼容性。
- 显示修复:修复竖屏显示导致的黑屏问题。
- 后处理优化:dnn_node 修复 YOLOv8-seg 后处理 box 越界崩溃问题。
- 帧率统计修复:hobot_codec 修复帧率计算错误。
- 无效文件清理:hobot_stereonet_utils 删除无法启动的 launch 文件。
- MIPI 摄像头修复:解决多路 I2C 检测问题,增加 LPWM 开关配置。
版本号:3.1.0
新增功能:
- 增加按键休眠和唤醒功能;
- 开放 40Pin 第二功能;
优化改进:
- 修复BUG;
- 修正can 频率 异常;
- 支持更多sensor和分辨率;
- 旧版本使用
apt update && apt upgrade升级到该版本时,需要先卸载tros-humble-stereonet-model,再安装tros-humble-hobot-stereonet包。
sudo apt-get remove tros-humble-stereonet-model
sudo dpkg --remove --force-all tros-humble-stereonet-model
sudo apt install -y tros-humble-hobot-stereonet
版本号:3.0.1
新增功能:
- 提供Server版本固件;
- 支持7款 微雪 MIPI DSI LCD 屏幕的桌面显示和触控;
- 支持非root用户执行示例程序;
优化改进:
- 修复BUG;
- 支持更多sensor和分辨率;
- 优化高分辨率显示稳定性;
版本号:3.0.0
首次发布的RDK X5固件,基于Ubuntu 22.04,提供丰富的多媒体示例,算法示例,支持多种应用场景的机器人应用开发。
RDK X3
版本号:3.0.0
新增功能:
- 支持 ubuntu 22.04
版本号:2.1.0
新增功能:
- 完善srpi-config系统配置工具,支持Wi-Fi连接,开/关SSH、VNC,使能/禁用40pin上的外设总线,本地化语言配置,设置CPU超频,设置ION内存大小等系统配置。
- 支持了/boot/config.txt系统配置文件,支持设置dtoverlay、cpu超频、io启动状态配置等选项。
- 添加yolov5s v6/v7 模型示例。
优化改进:
- 支持在hdmi显示器上输出启动日志和进入用户命令行,方便用户使用。
- 支持更多的hdmi显示分辨率,极大的增强了兼容性。
- 优化了Desktop和server版本的预装软件清单,删除冗余项,补充必要软件,如添加vlc。
- 优化了Desktop菜单栏的布局,精简选项。
- 默认开启蓝牙功能。
- 增加后处理的C++接口,提高后处理效率。
- 使用udisk2自动挂载U盘,解决NTFS文件系统自动挂载后不能访问的问题。
- 支持用户保留vnc密码文件。
- VNC服务默认不自动开启,可以减少系统的资源消耗。用户可以通过srpi-config工具打开。
- RDK X3 v2.1和RDK Module开发板CPU正常模式下最高运行在1.5GHz频率,超频后最高运行频率1.8GHz
问题修复:
- 删除Wi-Fi驱动的冗余内核日志。
- 修改apt源域名为archive.d-robotics.cc
其他更新:
- 支持 chromium 浏览器,用户可以使用
sudo apt install chromium安装使用。
版本号:2.0.0
这次发布带来了许多令人期待的功能和改进,旨在提供更好的开发体验和更广泛的应用场景支持。以下是本次版本发布的主要亮点:
开放源代码:
- 我们完全开放了操作系统的源代码,包括系统核心模块和功能模块的源代码。开发者可以自由地查看和修改源代码,为定制化和优化提供了更大的灵活性。
- 详细的代码文档和注释将提供给开发者,以帮助他们更好地理解和使用源代码。
- 我们欢迎开发者通过开源社区参与代码贡献和讨论,共同推动操作系统的改进和优化,源码在 D-Robotics 上维护。
支持RDK X3 Module:
- 我们引入了全新的核心板开发者套件,RDK X3 Module。
- RDK X3 Module拥有更小的尺寸,并兼容树莓派CM4接口。
- 开发者可以根据需求选择适配的第三方载板,从而扩展核心板的功能和应用场景。
其他更新:
- 我们对已有功能进行了优化,修复了已知问题和漏洞,提升了操作系统的稳定性和性能。
- 修订了文档和帮助文档,提供更全面、准确的技术资料和指南。
- 我们提供了更低层的API,方便开发者进行二次开发和集成,使其能够更加灵活地定制软件。