YOLO 目标检测
应用场景
RDK Studio 帮助零基础开发者快速上手,开启高效目标检测工作流:YOLO 系列作为单阶段目标检测中的代表算法,具有速度快,泛化性好的优点,可实现垃圾识别、车辆检测等功能,主要应用于自动驾驶、智能家居等领域。
准备工作
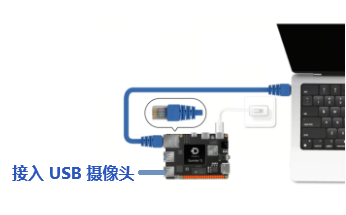
支持连接 USB 和 MIPI 摄像头,本章节以 USB 摄像头为例进行说明,USB 摄像头连接方法如下:
运行过程
-
点击
YOLO 目标检测示例下的 Node-RED。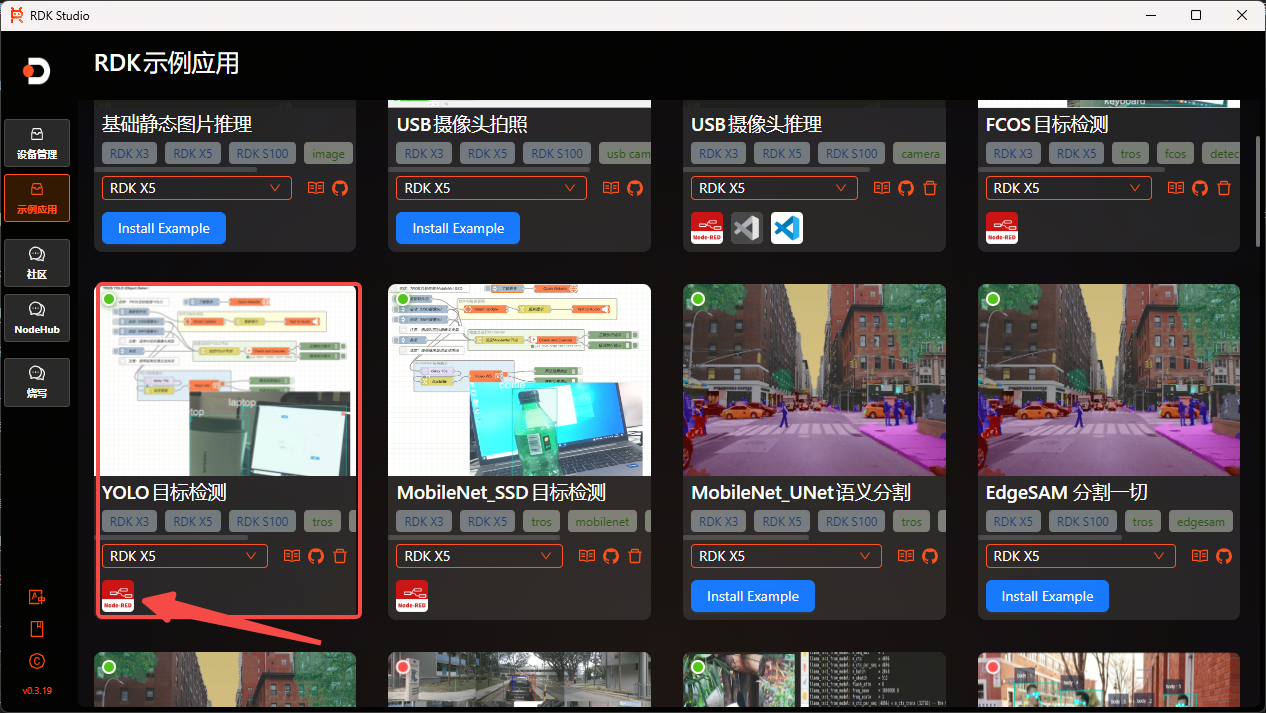
-
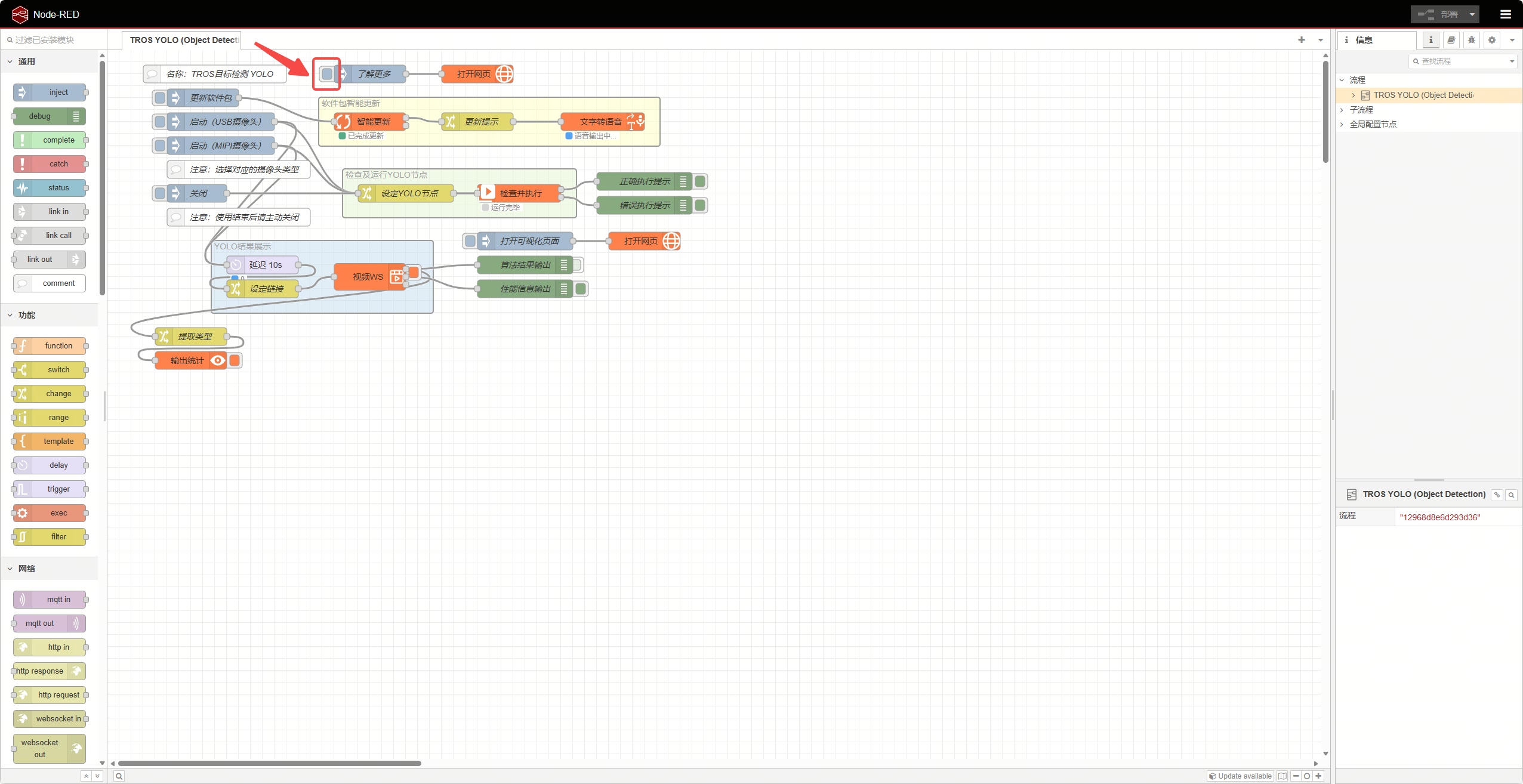
进入示例应用流程界面。
提示点击 RDK Studio 右上角
 图标可以快速在浏览器中打开示例!
图标可以快速在浏览器中打开示例!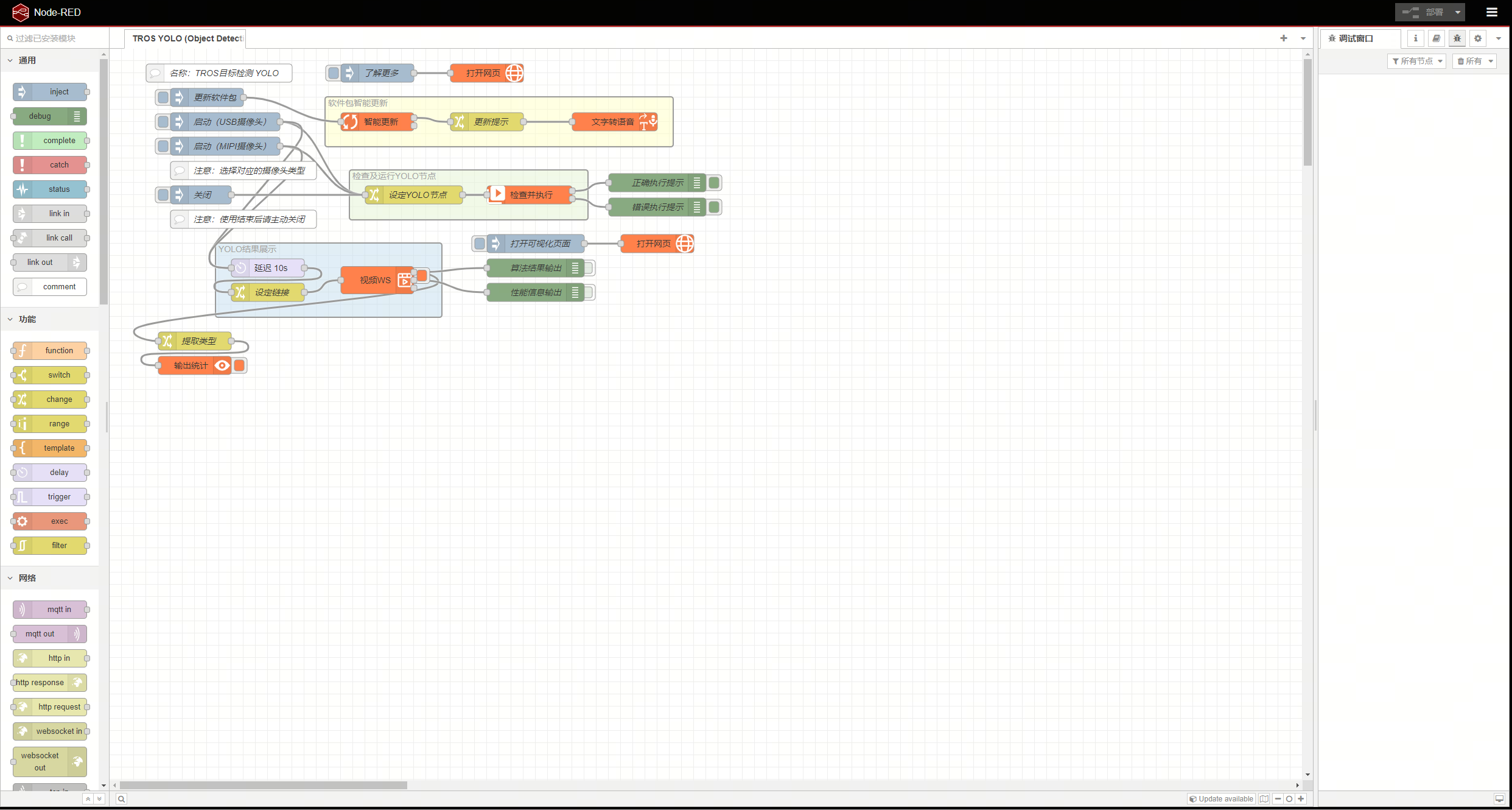
-
选择连接摄像头的类型,点击对应的
启动指令,等待大约 10s 后自动打开可视化窗口。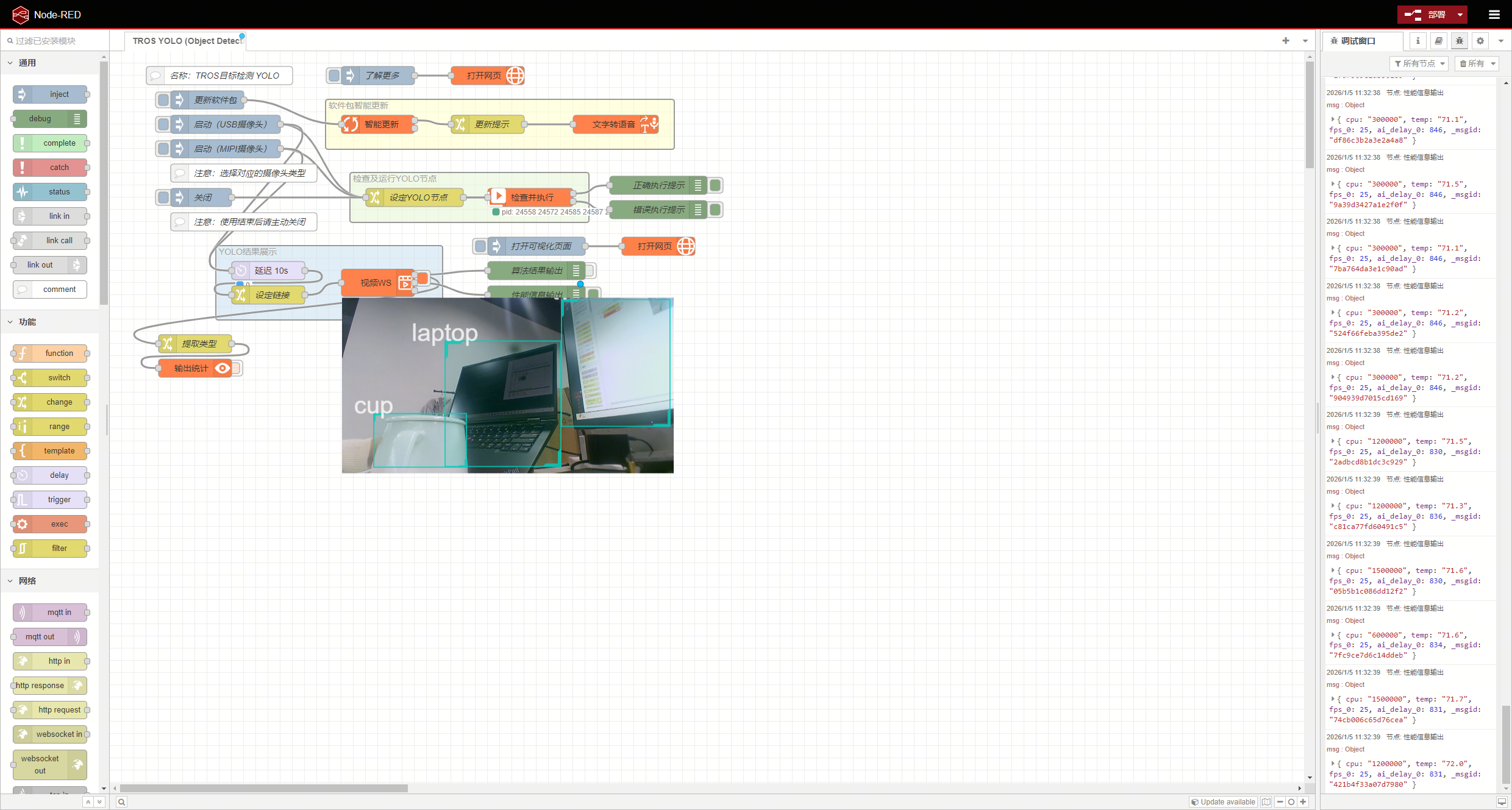
-
性能信息输出:点击右侧调试图标将右侧边栏定位至调试窗口,可在调试窗口查看性能信息输出结果。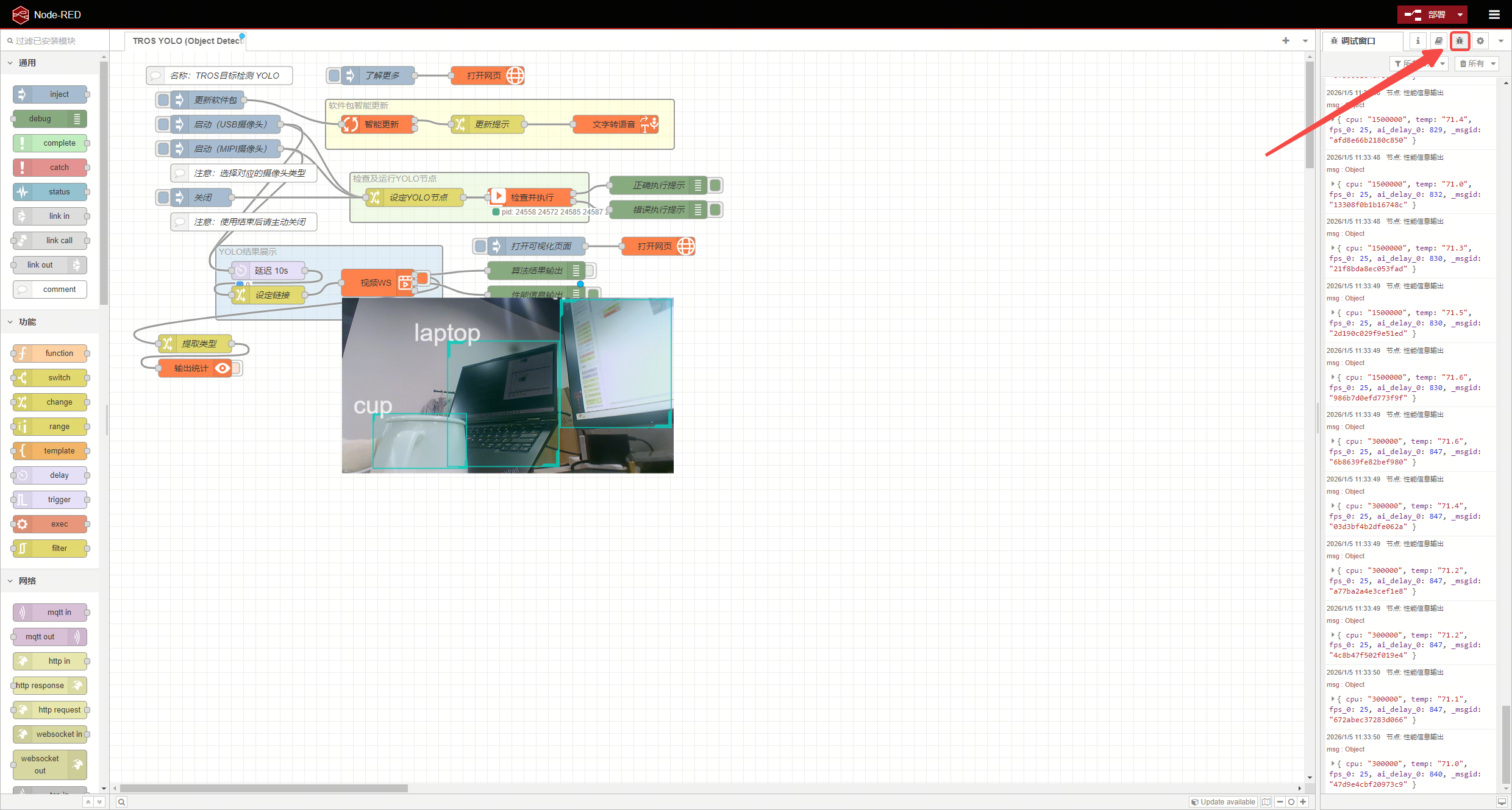
-
输出统计:可输出采集到的检测类型的统计结果。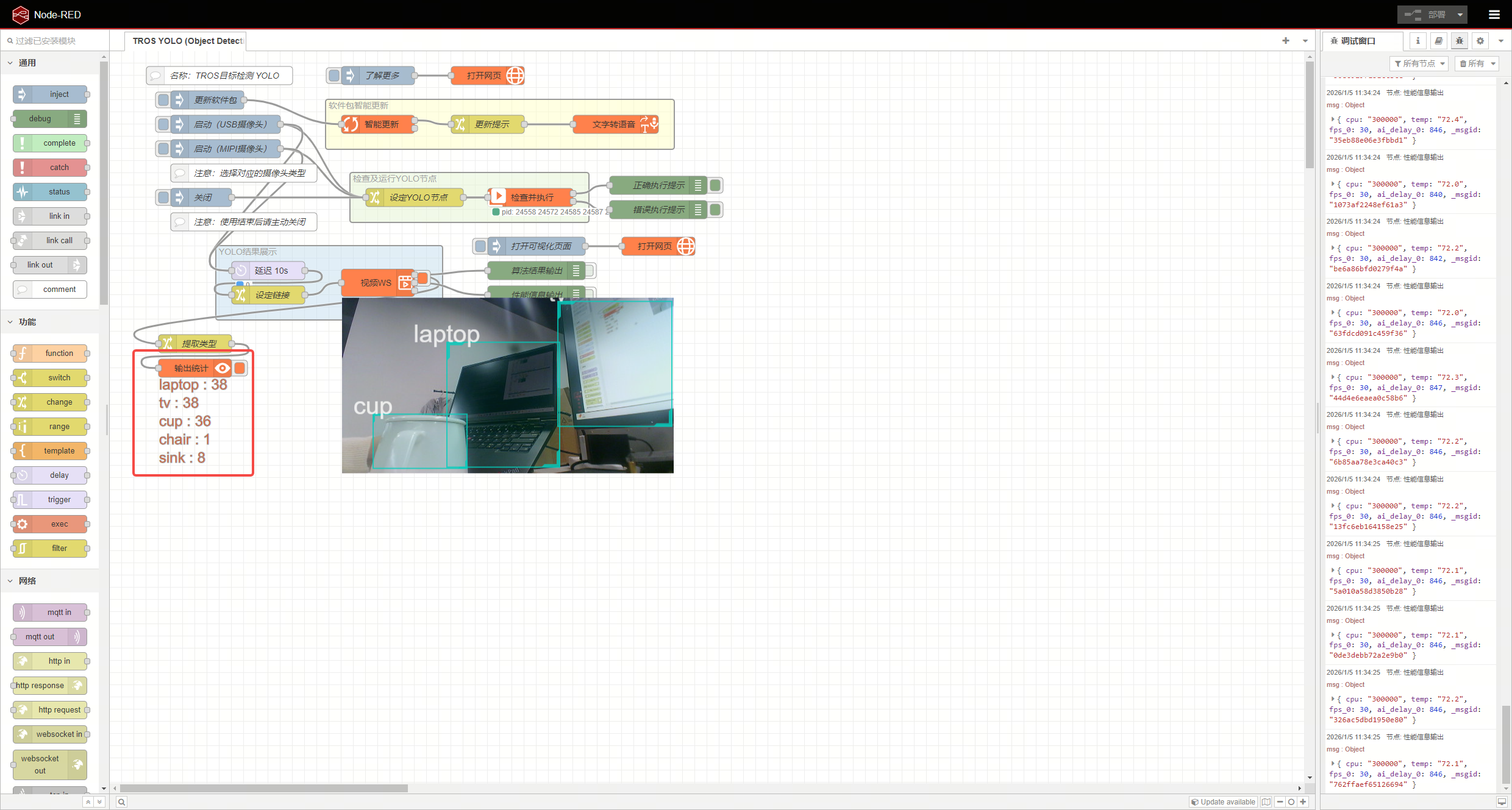
-
点击执行
关闭指令,关闭摄像头。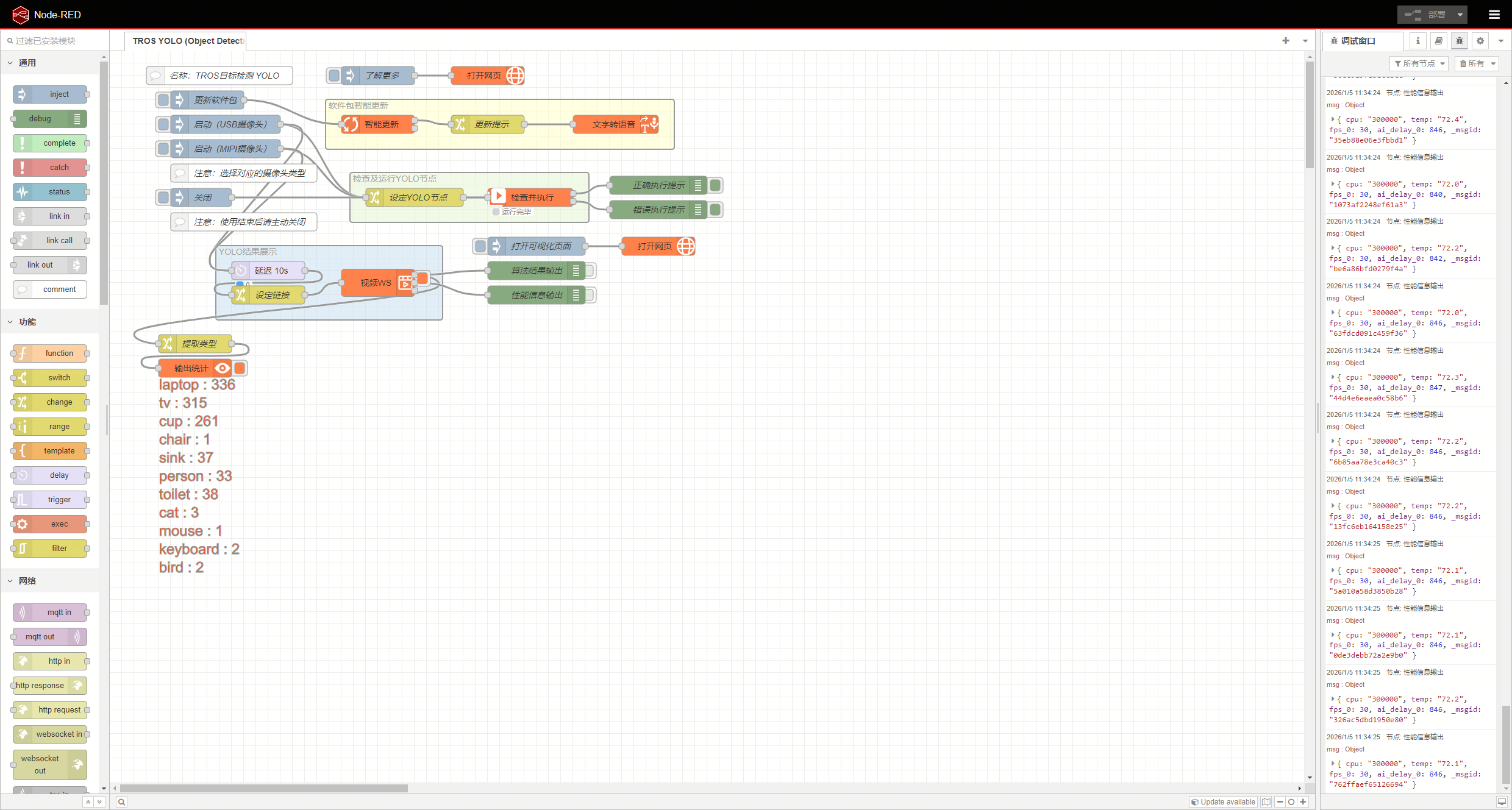 注意
注意如果对节点、流程等进行了修改,需点击右上角
 按钮后才能生效!
按钮后才能生效! -
点击右上角
×图标,选择 “关闭程序” 退出 Node-RED 应用。
更多功能
可视化页面
-
点击执行
可视化界面指令,自动打开 TogetherROS Web Display。
-
点击
Web Display, 进入可视化页面实时检测目标。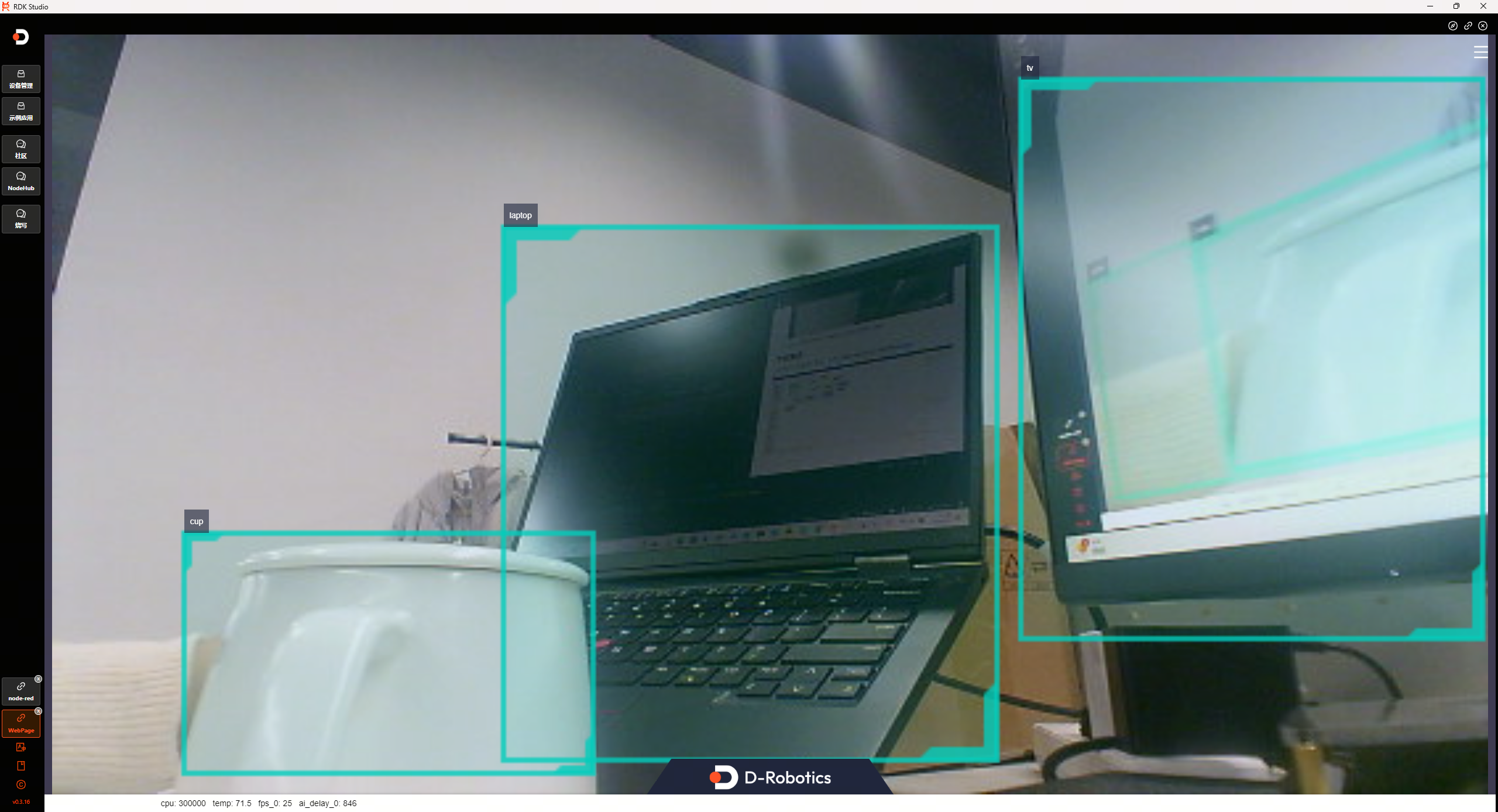
-
点击可视化页面右上角的
×退出可视化页面。
了解更多
点击执行 了解更多 指令,可打开在线文档查阅有关示例的更多信息。