DOSOD
Feature Introduction
DOSOD (Decoupled Open-Set Object Detector) [https://github.com/D-Robotics-AI-Lab/DOSOD] is Digua's self-developed open-vocabulary object detection method. By leveraging input textual features for reparameterization, it enables zero-shot modification of object detection categories—a key distinction from conventional detectors.
Code repository: (https://github.com/D-Robotics/hobot_dosod)
Application scenarios: DOSOD’s powerful zero-shot detection capability grants it superior generalization performance, making it suitable for applications such as autonomous driving, smart homes, and geological inspection.
Supported Platforms
| Platform | Runtime Environment | Example Functionality |
|---|---|---|
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | Launch MIPI/USB camera or local image replay, and display inference results via web browser |
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) | Launch MIPI/USB camera or local image replay, and display inference results via web browser |
Algorithm Details
| Model | Platform | Input Size | Inference FPS |
|---|---|---|---|
| DOSOD-l | X5 | 1×640×640×3 | 12 |
| DOSOD-l | S100 | 1×640×640×3 | 44.89 |
Prerequisites
RDK Platform
- The RDK has been flashed with the Ubuntu 22.04 system image.
- TogetheROS.Bot has been successfully installed on the RDK.
- An MIPI or USB camera has been installed on the RDK.
- Ensure your PC can access the RDK over the network.
Usage Guide
The DOSOD (hobot_dosod) package subscribes to images published by the sensor package, performs model inference, publishes algorithm messages after inference, and renders both the original images and corresponding algorithm results in a web browser on the PC via the websocket package.
RDK Platform
Publish images using an MIPI camera
- Humble
# Configure the tros.b environment
source /opt/tros/humble/setup.bash
# Copy required configuration files for the example from the tros.b installation path.
cp -r /opt/tros/${TROS_DISTRO}/lib/hobot_dosod/config/ .
# Configure MIPI camera
export CAM_TYPE=mipi
# Launch the launch file
ros2 launch hobot_dosod dosod.launch.py
Publish images using a USB camera
- Humble
# Configure the tros.b environment
source /opt/tros/humble/setup.bash
# Copy required configuration files for the example from the tros.b installation path.
cp -r /opt/tros/${TROS_DISTRO}/lib/hobot_dosod/config/ .
# Configure USB camera
export CAM_TYPE=usb
# Launch the launch file
ros2 launch hobot_dosod dosod.launch.py
Publish locally replayed images
- Humble
# Configure the tros.b environment
source /opt/tros/humble/setup.bash
# Copy required configuration files for the example from the tros.b installation path.
cp -r /opt/tros/${TROS_DISTRO}/lib/hobot_dosod/config/ .
# Configure local image replay
export CAM_TYPE=fb
# Launch the launch file
ros2 launch hobot_dosod dosod.launch.py
In addition to setting the camera type, you can also modify the model and its configuration:
- X5: Change the model file configuration to
dosod_model_file_name:="config/dosod_mlp3x_l_rep-int8.bin"and the category vocabulary configuration todosod_vocabulary_file_name:="config/offline_vocabulary.json". - S100: Change the model file configuration to
dosod_model_file_name:="config/dosod_mlp3x_l_rep-int16.hbm"and the category vocabulary configuration todosod_vocabulary_file_name:="config/offline_vocabulary.json".
Result Analysis
The following output appears in the terminal upon execution:
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-01-08-11-03-34-125542-ubuntu-9125
[INFO] [launch]: Default logging verbosity is set to INFO
camera_type is fb
using feedback
Hobot shm pkg enables zero-copy with fastrtps profiles file: /userdata/install/lib/hobot_shm/config/shm_fastdds.xml
Hobot shm pkg sets RMW_FASTRTPS_USE_QOS_FROM_XML: 1
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
webserver has launch
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
webserver has launch
[INFO] [hobot_image_pub-1]: process started with pid [9128]
[INFO] [hobot_codec_republish-2]: process started with pid [9130]
[INFO] [hobot_dosod-3]: process started with pid [9132]
[INFO] [websocket-4]: process started with pid [9134]
[hobot_codec_republish-2] [WARN] [1736305415.448727260] [hobot_codec_encoder]: Parameters:
[hobot_codec_republish-2] sub_topic: /hbmem_img
[hobot_codec_republish-2] pub_topic: /image
[hobot_codec_republish-2] channel: 1
[hobot_codec_republish-2] in_mode: shared_mem
[hobot_codec_republish-2] out_mode: ros
[hobot_codec_republish-2] in_format: nv12
[hobot_codec_republish-2] out_format: jpeg
[hobot_codec_republish-2] enc_qp: 10
[hobot_codec_republish-2] jpg_quality: 60
[hobot_codec_republish-2] input_framerate: 30
[hobot_codec_republish-2] output_framerate: -1
[hobot_codec_republish-2] dump_output: 0
[hobot_codec_republish-2] [WARN] [1736305415.455977260] [HobotCodecImpl]: platform x5
[hobot_codec_republish-2] [WARN] [1736305415.456186677] [hobot_codec_encoder]: Enabling zero-copy
[hobot_dosod-3] [WARN] [1736305415.687929557] [hobot_dosod]: This is hobot dosod!
[websocket-4] [WARN] [1736305415.794630560] [websocket]:
[websocket-4] Parameter:
[websocket-4] image_topic: /image
[websocket-4] image_type: mjpeg
[websocket-4] only_show_image: 0
[websocket-4] smart_topic: hobot_dosod
[websocket-4] output_fps: 0
[hobot_dosod-3] [WARN] [1736305415.835729185] [hobot_dosod]: Parameter:
[hobot_dosod-3] model_file_name: config/dosod_mlp3x_l_rep-int8.bin
[hobot_dosod-3] vocabulary_file_name: config/offline_vocabulary.json
[hobot_dosod-3] feed_type(0:local, 1:sub): 1
[hobot_dosod-3] image: config/000000160864.jpg
[hobot_dosod-3] dump_ai_result: 0
[hobot_dosod-3] dump_raw_img: 0
[hobot_dosod-3] dump_render_img: 0
[hobot_dosod-3] dump_ai_path: .
[hobot_dosod-3] dump_raw_path: .
[hobot_dosod-3] dump_render_path: .
[hobot_dosod-3] is_shared_mem_sub: 1
[hobot_dosod-3] score_threshold: 0.2
[hobot_dosod-3] iou_threshold: 0.5
[hobot_dosod-3] nms_top_k: 50
[hobot_dosod-3] is_homography: 0
[hobot_dosod-3] trigger_mode: 0
[hobot_dosod-3] class_mode: 0
[hobot_dosod-3] task_num: 2
[hobot_dosod-3] roi: 0
[hobot_dosod-3] y_offset: 950
[hobot_dosod-3] ai_msg_pub_topic_name: /hobot_dosod
[hobot_dosod-3] ros_img_sub_topic_name: /image
[hobot_dosod-3] [WARN] [1736305415.836617477] [hobot_dosod]: model_file_name_: config/dosod_mlp3x_l_rep-int8.bin, task_num: 2
[hobot_dosod-3] [BPU_PLAT]BPU Platform Version(1.3.6)!
[hobot_dosod-3] [HBRT] set log level as 0. version = 3.15.54.0
[hobot_dosod-3] [DNN] Runtime version = 1.23.10_(3.15.54 HBRT)
[hobot_image_pub-1] [WARN] [1736305416.129590859] [image_pub_node]: parameter:
[hobot_image_pub-1] image_source: ./config/000000160864.jpg
[hobot_image_pub-1] source_image_w: 960
[hobot_image_pub-1] source_image_h: 544
[hobot_image_pub-1] output_image_w: 1920
[hobot_image_pub-1] output_image_h: 1080
[hobot_image_pub-1] fps: 10
[hobot_image_pub-1] is_shared_mem: 1
[hobot_image_pub-1] is_loop: 1
[hobot_image_pub-1] is_compressed_img_pub: 0
[hobot_image_pub-1] image_format: jpg
[hobot_image_pub-1] pub_encoding: nv12pub_name_mode: 0
[hobot_image_pub-1] msg_pub_topic_name: /hbmem_img
[hobot_image_pub-1] [WARN] [1736305416.130613275] [hobot_image_pub]: Enabling zero-copy
[hobot_codec_republish-2] [WARN] [1736305416.348757530] [hobot_codec_encoder]: Loaned messages are only safe with const ref subscription callbacks. If you are using any other kind of subscriptions, set the ROS_DISABLE_LOANED_MESSAGES environment variable to 1 (the default).
[hobot_codec_republish-2] [WARN] [1736305416.349073988] [HobotVenc]: init_pic_w_: 1920, init_pic_h_: 1080, alined_pic_w_: 1920, alined_pic_h_: 1088, aline_w_: 16, aline_h_: 16
[hobot_dosod-3] [A][DNN][packed_model.cpp:247][Model](2025-01-08,11:03:36.664.601) [HorizonRT] The model builder version = 1.24.3
[hobot_dosod-3] [WARN] [1736305417.323044552] [hobot_dosod]: Get model name: 3x-l_epoch_100_rep-coco80-without-nms from load model.
[hobot_dosod-3] [WARN] [1736305417.323560635] [hobot_dosod]: Create ai msg publisher with topic_name: /hobot_dosod
[hobot_dosod-3] [WARN] [1736305417.350238969] [hobot_dosod]: Create img hbmem_subscription with topic_name: /hbmem_img
[hobot_dosod-3] [WARN] [1736305417.445453471] [dosod]: Loaned messages are only safe with const ref subscription callbacks. If you are using any other kind of subscriptions, set the ROS_DISABLE_LOANED_MESSAGES environment variable to 1 (the default).
[hobot_codec_republish-2] [WARN] [1736305417.453916388] [hobot_codec_encoder]: sub nv12 1920x1088, fps: 11.4504, pub jpeg, fps: 11.4504, comm delay [0.0833]ms, codec delay [13.5833]ms
[hobot_dosod-3] [W][DNN]bpu_model_info.cpp:491][Version](2025-01-08,11:03:37.311.128) Model: 3x-l_epoch_100_rep-coco80-without-nms. Inconsistency between the hbrt library version 3.15.54.0 and the model build version 3.15.55.0 detected, in order to ensure correct model results, it is recommended to use compilation tools and the BPU SDK from the same OpenExplorer package.
[hobot_dosod-3] [WARN] [1736305418.846408168] [hobot_dosod]: Sub img fps: 12.95, Smart fps: 12.67, pre process time ms: 12, infer time ms: 78, post process time ms: 8
[hobot_dosod-3] [WARN] [1736305419.857350566] [hobot_dosod]: Sub img fps: 9.97, Smart fps: 10.88, pre process time ms: 11, infer time ms: 91, post process time ms: 8
[hobot_dosod-3] [WARN] [1736305420.858769504] [hobot_dosod]: Sub img fps: 10.04, Smart fps: 9.99, pre process time ms: 13, infer time ms: 100, post process time ms: 7
[hobot_dosod-3] [WARN] [1736305421.860964318] [hobot_dosod]: Sub img fps: 9.99, Smart fps: 9.99, pre process time ms: 14, infer time ms: 100, post process time ms: 7
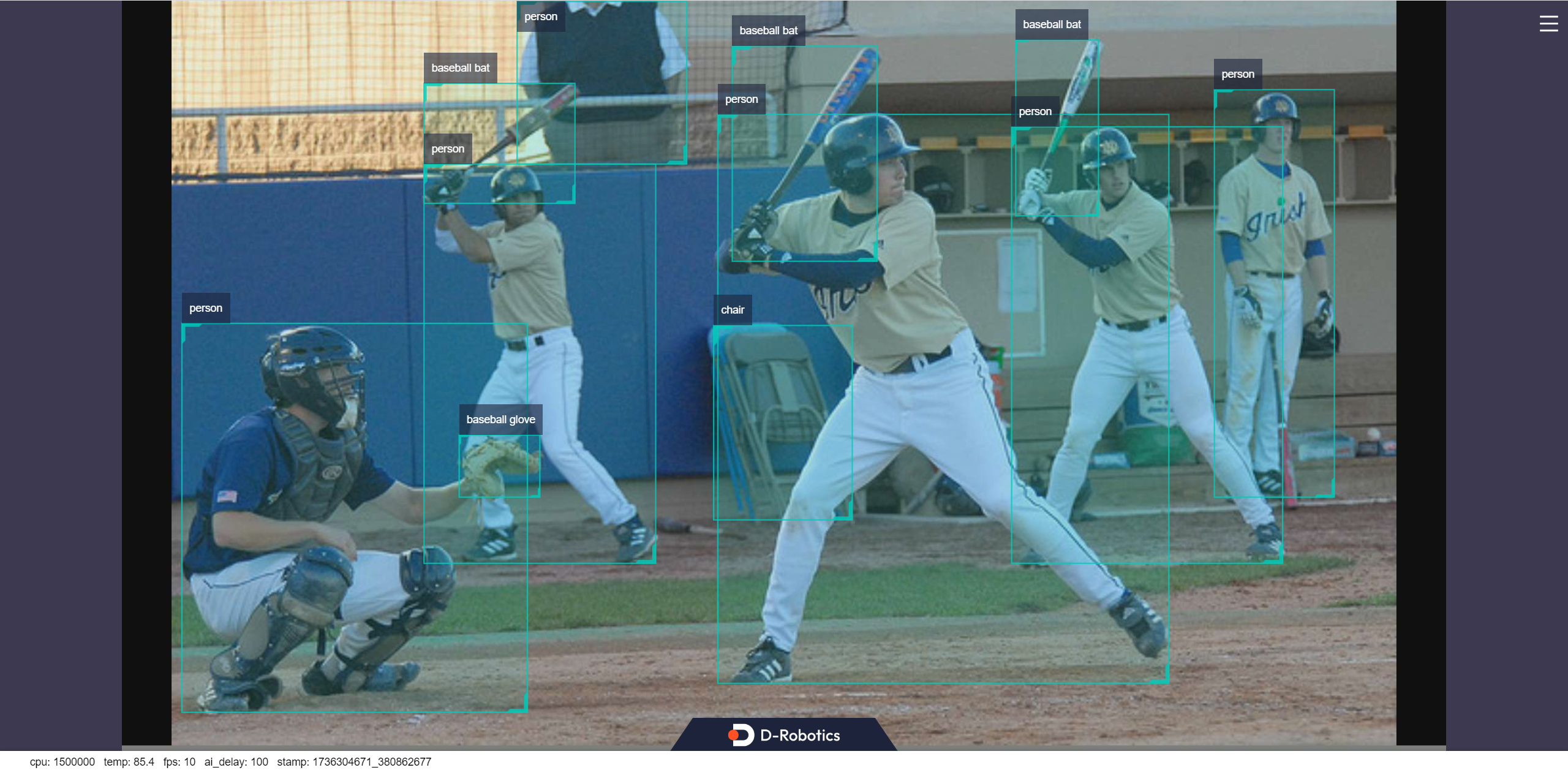
Enter http://IP:8000 in your PC browser to view the image and algorithm rendering results (replace IP with the RDK's IP address):
Advanced Usage
If you wish to modify custom categories, please refer to the Model Re-parameterization Method.