5.1.4 运行“Hello World”
前提:已通过deb包或者源码安装的方式成功安装TogetheROS.Bot
启动两个终端,均ssh登陆至RDK或X86平台设备
- Foxy
- Humble
第一个终端运行
source /opt/tros/setup.bash
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
第二个终端运行
source /opt/tros/setup.bash
ros2 run examples_rclcpp_minimal_publisher publisher_member_function
安装Hello World example对应的package:
sudo apt update
sudo apt install ros-humble-examples-rclcpp-minimal-publisher ros-humble-examples-rclcpp-minimal-subscriber
注意
如果sudo apt update命令执行失败或报错,请查看常见问题章节的Q10: apt update 命令执行失败或报错如何处理?解决。
第一个终端运行
source /opt/tros/humble/setup.bash
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
第二个终端运行
source /opt/tros/humble/setup.bash
ros2 run examples_rclcpp_minimal_publisher publisher_member_function
运行效果如下图
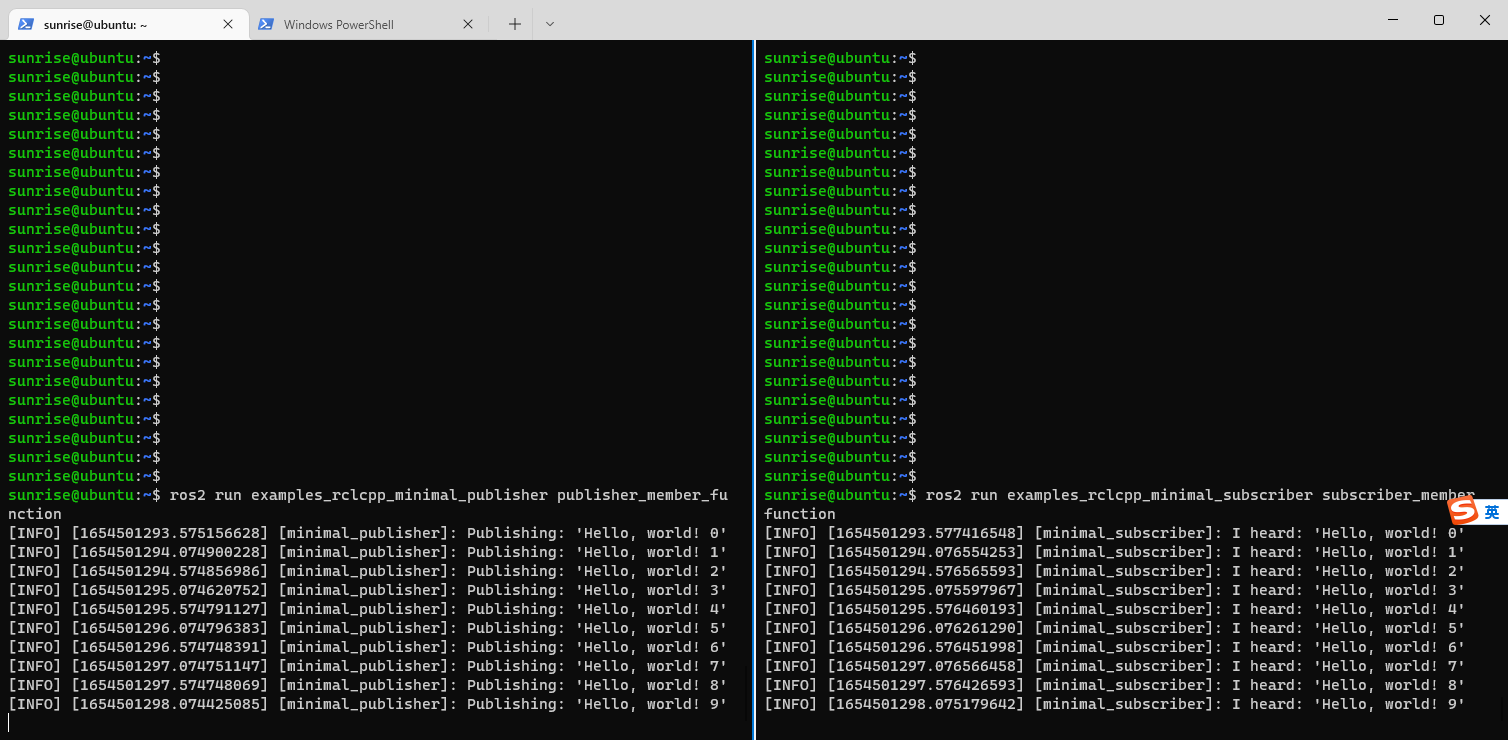 可以看到左侧终端作为pub,在不断发送“'Hello, world! N”,右侧终端作为sub端不断收到“'Hello, world! N”
可以看到左侧终端作为pub,在不断发送“'Hello, world! N”,右侧终端作为sub端不断收到“'Hello, world! N”
OK tros.b目前已成功安装并验证!