YOLOv5 Model
Introduction
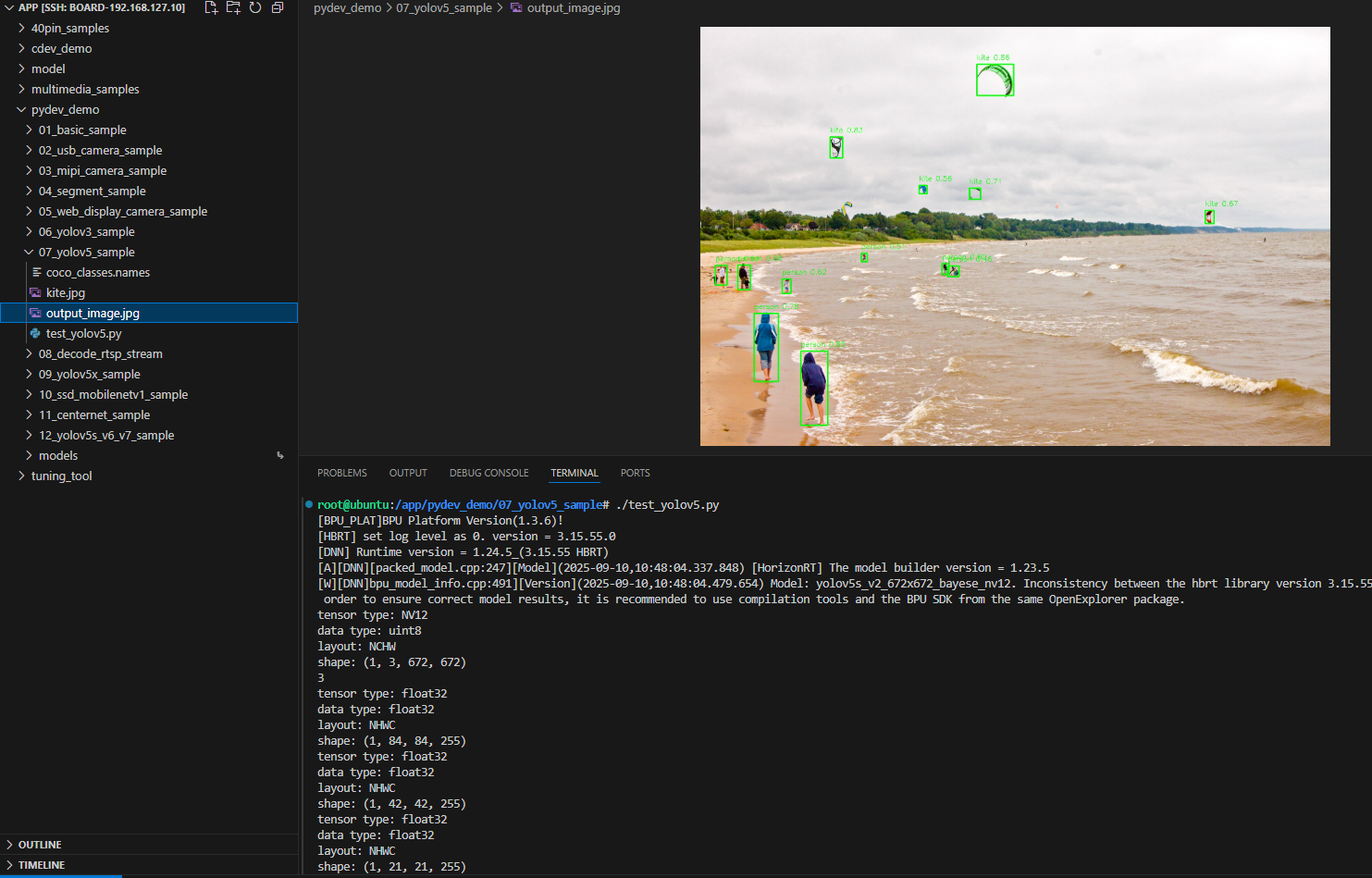
The YOLOv5 sample under /app/pydev_demo/07_yolov5_sample/ demonstrates object detection with YOLOv5. Compared with YOLOv3, YOLOv5 typically offers better accuracy and speed. The sample runs on a static image and draws boxes with confidence scores.
Demo
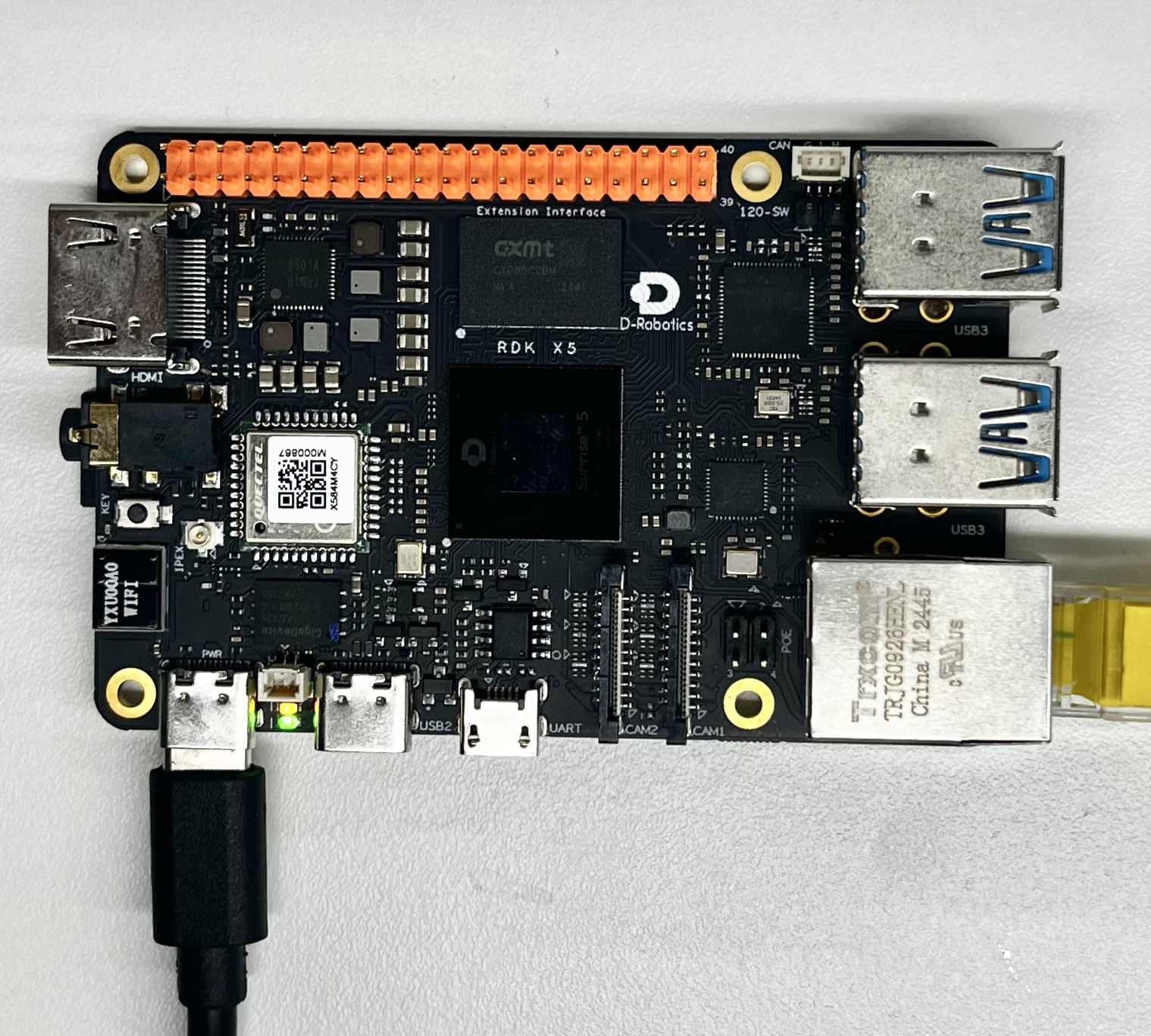
Hardware setup
Connections
Only the RDK board is required.
Quick start
Code location on device
root@ubuntu:/app/pydev_demo/07_yolov5_sample# tree
.
├── coco_classes.names
├── kite.jpg
└── test_yolov5.py
Build and run
python3 test_yolov5.py
Sample output
root@ubuntu:/app/pydev_demo/07_yolov5_sample# ./test_yolov5.py
[BPU_PLAT]BPU Platform Version(1.3.6)!
[HBRT] set log level as 0. version = 3.15.55.0
[DNN] Runtime version = 1.24.5_(3.15.55 HBRT)
[A][DNN][packed_model.cpp:247][Model](2025-09-10,10:48:04.337.848) [HorizonRT] The model builder version = 1.23.5
[W][DNN]bpu_model_info.cpp:491][Version](2025-09-10,10:48:04.479.654) Model: yolov5s_v2_672x672_bayese_nv12. Inconsistency between the hbrt library version 3.15.55.0 and the model build version 3.15.47.0 detected, in order to ensure correct model results, it is recommended to use compilation tools and the BPU SDK from the same OpenExplorer package.
tensor type: NV12
data type: uint8
layout: NCHW
shape: (1, 3, 672, 672)
3
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 84, 84, 255)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 42, 42, 255)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 21, 21, 255)
bbox: [593.949768, 80.819038, 672.215027, 147.131607], score: 0.856997, id: 33, name: kite
bbox: [215.716019, 696.537476, 273.653442, 855.298706], score: 0.852251, id: 0, name: person
bbox: [278.934448, 236.631256, 305.838867, 281.294922], score: 0.834647, id: 33, name: kite
bbox: [115.184196, 615.987, 167.202667, 761.042542], score: 0.781627, id: 0, name: person
bbox: [577.261719, 346.008453, 601.795349, 370.308624], score: 0.705358, id: 33, name: kite
bbox: [1083.22998, 394.714569, 1102.146729, 422.34787], score: 0.673642, id: 33, name: kite
bbox: [80.515938, 511.157104, 107.181572, 564.28363], score: 0.662, id: 0, name: person
bbox: [175.470078, 541.949219, 194.192871, 572.981812], score: 0.623189, id: 0, name: person
bbox: [518.504333, 508.224396, 533.452759, 531.92926], score: 0.597822, id: 0, name: person
bbox: [469.970398, 340.634796, 486.181305, 358.508972], score: 0.5593, id: 33, name: kite
bbox: [32.987705, 512.65033, 57.665741, 554.898804], score: 0.508812, id: 0, name: person
bbox: [345.142609, 486.988464, 358.24762, 504.551331], score: 0.50672, id: 0, name: person
bbox: [530.825439, 513.695679, 555.200256, 536.498352], score: 0.459818, id: 0, name: person
draw result time is : 0.03627920150756836
Details
Command-line options
No arguments; uses kite.jpg by default.
Software architecture
- Load YOLOv5
- Preprocess to NV12 672×672
- Forward pass
- Post-process with libpostprocess
- Draw and save

API flow
models = dnn.load('../models/yolov5s_672x672_nv12.bin')- Resize → NV12
outputs = models[0].forward(nv12_data)- Post-process config
- Parse tensors
- Draw and save

FAQ
Q: Difference between YOLOv5 and YOLOv3?
A: YOLOv5 improves architecture, training, and post-processing—usually better accuracy and speed.
Q: hobot_dnn missing?
A: Install the RDK Python stack and official packages.
Q: Change image?
A: Set img_file = cv2.imread('...').
Q: Poor results?
A: COCO-trained; fine-tune or switch models for your scene.
Q: Threshold?
A: yolov5_postprocess_info.score_threshold (e.g. 0.5).
Q: Video?
A: Extend for video loops.
Q: Other YOLOv5 sizes?
A: model_zoo or hobot_model.
Q: More speed?
A: Try lighter variants (YOLOv5n/s) or lower input resolution.