目标跟踪分割(EdgeTAM)
功能介绍
EdgeTAM (Edge Track Anything Model) 是基于 Facebook Research 开源的 EdgeTAM 模型在 RDK 平台上部署的目标跟踪与分割应用。通过点提示或框提示,在视频流中对任意目标进行持续跟踪与分割。
mono_edgetam 包含两个子工程:
- mono_edgetam_prompt:负责 prompt 初始化,基于输入图像和点/框提示做模型推理,生成并保存 memory 特征文件供下游使用。
- mono_edgetam_track:负责连续跟踪分割,加载 prompt 阶段保存的特征信息后进行后续帧的跟踪并发布分割结果。
使用流程:先启动 mono_edgetam_prompt 对目标进行初始化,再启动 mono_edgetam_track 加载初始化特征开始跟踪。
代码仓库:
(https://github.com/D-Robotics/mono_edgetam)
应用场景:EdgeTAM能够通过点/框提示对任意目标进行持续的跟踪与分割,可实现视频目标分割、交互式视频编辑等功能,主要应用于自动驾驶、视频分析、智能交互等领域。
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) | 启动MIPI/USB摄像头/本地回灌,并通过Web展示推理渲染结果 |
算法信息
| 模型 | 平台 | 输入尺寸 | 推理帧率(fps) |
|---|---|---|---|
| EdgeTAM Prompt | S100 | 1x1024x1024x3 | - |
| EdgeTAM Track | S100 | 1x1024x1024x3 | - |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
RDK已安装MIPI或者USB摄像头,无摄像头的情况下通过回灌本地JPEG格式图片的方式体验算法效果。
-
确认PC机能够通过网络访问RDK。
下载模型与数据
# 下载prompt模型
wget https://archive.d-robotics.cc/downloads/models/edgetam/s100/model_prompt_to_memory_points.hbm
# 下载track模型
wget https://archive.d-robotics.cc/downloads/models/edgetam/s100/model_track_step_s7.hbm
# 下载示例数据集
wget https://archive.d-robotics.cc/downloads/models/edgetam/bedroom.tar
tar -xvf bedroom.tar
使用介绍
EdgeTAM 跟踪分割包含两个阶段:提示阶段 和 跟踪阶段。
-
提示阶段:跟踪前需要获取一个 traget embedding 提示特征用于跟踪。这一步通过 sam 机制, 通过给图像一个点/框作为提示词,生成图像的分割结果和 traget embedding 提示特征。注意目标物体移动到提示点/框区域内。可在本文最下方 进阶使用 修改点/框区域。
-
跟踪阶段:关闭提示阶段后, 加载上一个 traget embedding 提示特征, 进行跟踪。 两个节点不支持同时启动。
1. 启动 mono_edgetam_prompt(提示阶段)
prompt 初始化节点基于输入图像和点/框提示做模型推理,生成 traget embedding 提示特征文件保存到本地,供后续跟踪节点加载。
mipi摄像头发布图片
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch mono_edgetam_prompt mono_edgetam_prompt.launch.py edgetam_prompt_mode:=0
使用usb摄像头发布图片
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch mono_edgetam_prompt mono_edgetam_prompt.launch.py edgetam_prompt_mode:=0
使用单张回灌图片
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 配置回灌图片
export CAM_TYPE=fb
# 启动launch文件
ros2 launch mono_edgetam_prompt mono_edgetam_prompt.launch.py edgetam_prompt_mode:=0
Web 展示
在PC端的浏览器输入 http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址),打开界面右上角设置,选中"Full Image Segmentation"选项,可以显示分割渲染效果。
提示阶段渲染效果:
提示阶段节点完成一次推理后,会自动将生成的特征文件保存到当前工作目录,供后续跟踪节点加载使用。
提示词保存说明
- 保存时机:节点接收到图像并完成推理后,会立即将 memory 特征张量写入本地文件。选择分割结果最好的帧退出, 这时保存当前目前的跟踪特征。
- 生成文件:
cond_maskmem_features.bin:mask memory 特征文件cond_maskmem_pos_enc.bin:memory positional encoding 文件cond_obj_ptr.bin:object pointer 文件
注意:跟踪节点启动时将从当前工作目录加载这些特征文件。如果在提示阶段和跟踪阶段之间切换了工作目录,请将生成的特征文件拷贝到跟踪节点的工作目录下,或将两个阶段在相同目录下运行。
2. 启动 mono_edgetam_track(跟踪阶段)
跟踪节点加载特征文件(cond_maskmem_features.bin、cond_maskmem_pos_enc.bin、cond_obj_ptr.bin),对视频流中的目标进行连续跟踪与分割,并发布分割结果。
注意:在相同目录下运行 mono_edgetam_track 跟踪节点,确保跟踪节点加载的是提示阶段生成的特征文件。
mipi摄像头发布图片
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch mono_edgetam_track mono_edgetam_track.launch.py edgetam_is_overwrite_features:=0
使用usb摄像头发布图片
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch mono_edgetam_track mono_edgetam_track.launch.py edgetam_is_overwrite_features:=0
使用单张回灌图片
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 配置回灌图片
export CAM_TYPE=fb
# 启动launch文件
ros2 launch mono_edgetam_track mono_edgetam_track.launch.py edgetam_is_overwrite_features:=0
结果分析
Web 展示
在PC端的浏览器输入 http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址),打开界面右上角设置,选中"Full Image Segmentation"选项,可以显示分割渲染效果。
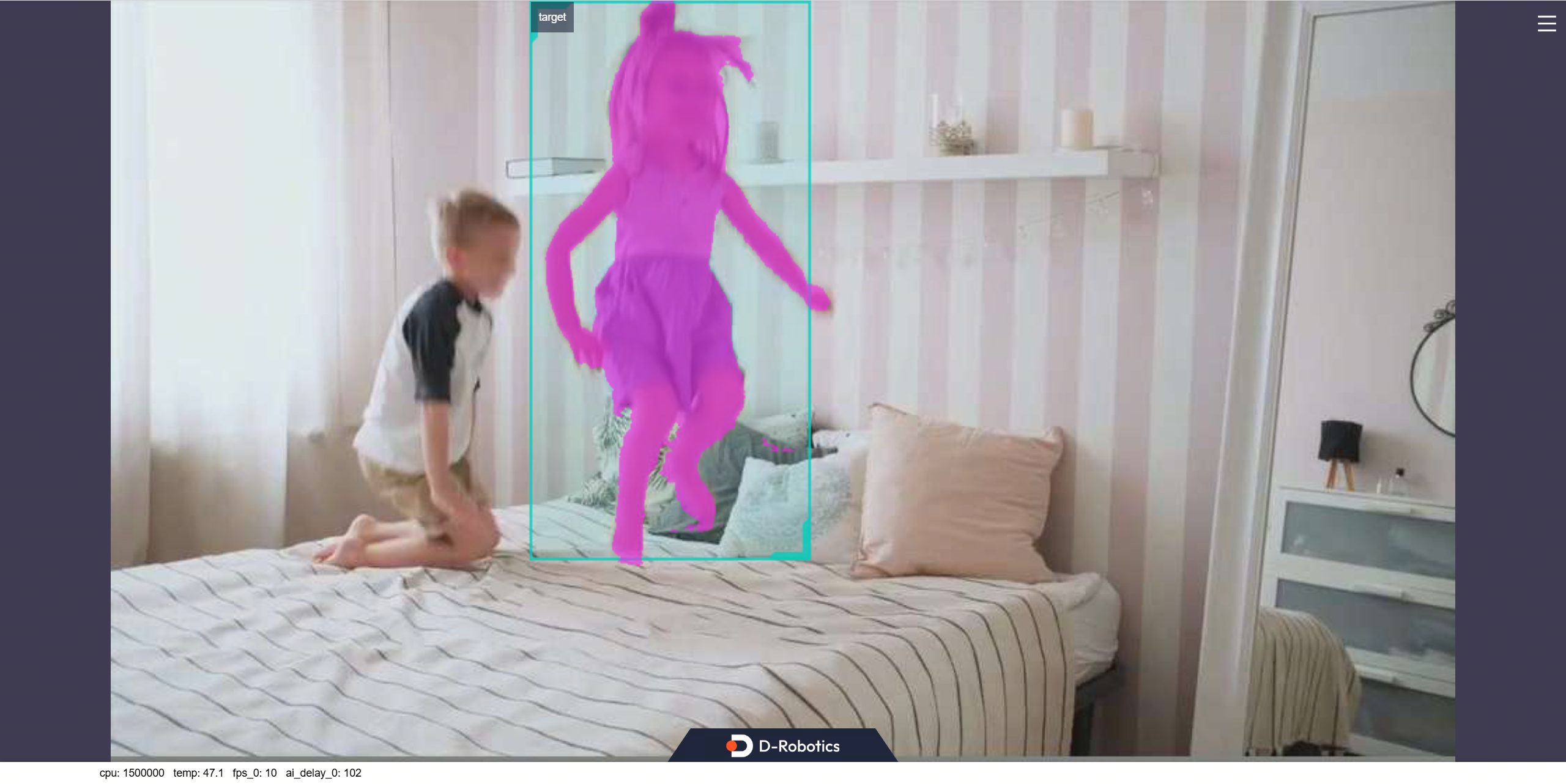
跟踪阶段渲染效果:

进阶使用
1. 修改��提示模式(仅提示阶段)
prompt 模式通过 edgetam_prompt_mode 参数设置:
0:框类提示(默认) — 算法使用边界框来定义目标区域。框内的物体将被作为目标进行跟踪与分割。1:点类提示 — 算法使用点坐标来定义目标区域。基于 SAM 机制,算法会选择指定点附近最显著的目标物体。可以通过指定最多两个点来细化选择范围。
点类提示如何选择区域
当设置 edgetam_prompt_mode:=1(点类提示模式)时,需要指定至少一个点坐标。每个点通过一个 rect(width=0, height=0)来表示,其中 x_offset 和 y_offset 定义了该点在图像上的像素坐标。算法利用 SAM 的分割能力来识别给定点附近的目标物体。
以下示例中指定了两个点:
- 第一个点
{x_offset: 210, y_offset: 350}作为 正向点,算法将包含该位置附近的目标物体。 - 第二个点
{x_offset: 250, y_offset: 220}作为额外的参考点,帮助算法更精准地定位目标物体。
在同一个目标上使用两个(或更多)正向点可以产生更准确的分割掩膜。如果目标与背景分离较好,也可以使用单个点。
2. 动态修改提示词(仅提示阶段)
启动节点的同时,可以通过 topic 发布动态修改提示框/点:
- Humble
# 配置ROS2环境
source /opt/tros/humble/setup.bash
# 在另一个终端发布'框'提示
# rect 参数说明:
# x_offset: 边界框左上角 X 坐标(单位:像素)
# y_offset: 边界框左上角 Y 坐标(单位:像素)
# width: 边界框宽度(单位:像素),设为 0 表示点提示模式
# height: 边界框高度(单位:像素),设为 0 表示点提示模式
# 当 width > 0 且 height > 0 时:(x_offset, y_offset) 为框提示的左上角
# 当 width = 0 且 height = 0 时:(x_offset, y_offset) 为点提示的坐标
ros2 topic pub /hobot_dnn_detection ai_msgs/msg/PerceptionTargets \
'{"targets": [{"rois": [{"rect": {"x_offset": 240, "y_offset": 135, "width": 480, "height": 270}, "type": "anything"}]}]}'
# 或发布'点'提示(设置框宽高为0)
# 以下两个点定义了两个正向点,帮助算法更准确地定位目标物体
# rect 参数说明:
# x_offset: 提示点 X 坐标(单位:像素)
# y_offset: 提示点 Y 坐标(单位:像素)
ros2 topic pub /hobot_dnn_detection ai_msgs/msg/PerceptionTargets \
'{"targets": [{"rois": [{"rect": {"x_offset": 210, "y_offset": 350, "width": 0, "height": 0}, "type": "anything"}, {"rect": {"x_offset": 250, "y_offset": 220, "width": 0, "height": 0}, "type": "anything"}]}]}'