7.3.2 示例程序
本章简述D-Robotics 多媒体应用示例,所涉及源码可以通过 sudo apt install hobot-multimedia-samples 获得,安装在 /app/multimedia_samples 目录下。
get_sif_data 使用说明
程序功能
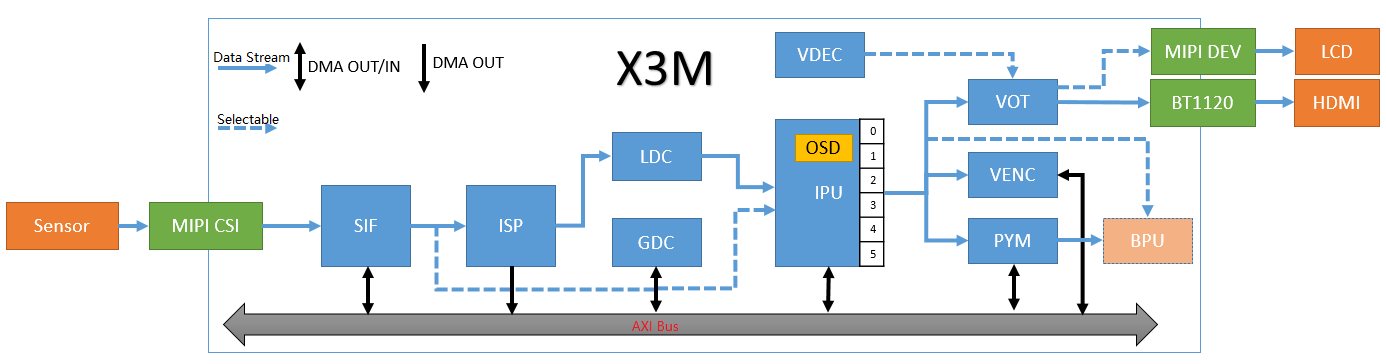
下图所示为X3M的视频数据通路框图,其中的专业名词解释请查看 多媒体开发概述-术语约定。
get_sif_data 完成 sensor 、MIPI CSI 和 SIF 模块的初始化,实现从SIF模块获取视频帧数据的功能,支持从SIF模块获取Raw、YUV两种格式的图像。
get_sif_data 可以有效帮助用户调试sensor和X3M的点亮调试,在打通sensor -> SIF的数据通路后,再调试其他模块的功能。
程序开发
源码结构
源码位于 /app/multimedia_samples/get_sif_data
.
├── main.c # 主程序,完成sensor列表的加载,和命令控制
├── Makefile # 编译makefile
├── module.c
├── module.h
├── Readme.md
├── sensor_handle.c # sensor 初始化、从sif中获取图像的接口
├── sensor_handle.h
├── sensors # sensor参数配置,每个新sensor在本目录新增一个文件
│ ├── sensor_f37.c
│ └── sensor_imx415.c
└── sensors.lds
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成get_sif_data程序
$ cd sample/get_sif_data
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
get_sif_data main.c main.o Makefile module.c module.h module.o Readme.md sensor_handle.c sensor_handle.h sensor_handle.o sensors sensors.lds
添加新sensor
如果有新sensor需要调试,请参考 sensors 目录下的源码文件,对应添加一个新的sensor配置即可。
以F37为例说明关键代码:
/*
* 添加sensor、mipi、sif dev、isp的参数配置
* 各结构体中参数在代码中有已经有比较详细的注释说明
* 其中isp部分参数在本程序中无需关注
*/
static int set_sensor_param(void)
{
printf("set_sensor_param\n");
/*定义 sensor 初始化的属性信息 */
snsinfo = SENSOR_1LANE_F37_30FPS_10BIT_LINEAR_INFO;
/*定义 mipi 初始化参数信息 */
mipi_attr = MIPI_1LANE_SENSOR_F37_30FPS_10BIT_LINEAR_ATTR;
/*定义 dev 初始化的属性信息 */
devinfo = DEV_ATTR_F37_LINEAR_BASE;
/*定义 pipe 属性信息 */
pipeinfo = PIPE_ATTR_F37_LINEAR_BASE;
return sensor_sif_dev_init();
return 0;
}
/*
* 主程序遍历sensor模块时调用本函数完成sensor名和sensor参数配置接口的注册
*/
static int sensor_probe(void)
{
int i = 0;
/* 在sensor_lists里面找到一个空位置 */
for (i = 0; i < ARRAY_SIZE(sensor_lists); i++) {
if (0 == strlen(sensor_lists[i].sensor_tag)) break;
}
if (i >= ARRAY_SIZE(sensor_lists)) {
printf("sensor lists is full\n");
return -1;
}
strncpy(sensor_lists[i].sensor_tag, SENSOR_TAG, 31 > strlen(SENSOR_TAG) ? strlen(SENSOR_TAG) : 31);
sensor_lists[i].func = set_sensor_param;
return 0;
}
/* 注册sensor的模块入口,主程序在遍历sensor时会用到 */
SENSOR_MODULE_INSTALL(sensor_probe);
功能使用
硬件连接
RDK X3 开发板通过mipi host接口用于连接Sensor模组,请根据当前要调试的Sensor模组型号正确连接。
程序部署
按照上面的编译流程生成出get_sif_data后,执行该程序,根据提示选择当前连接在开发板上的sensor类别,比如当前连接的是 F37 sensor,则选择 1。
如果初始化成功,会自动获取第一帧图像(pipe0_plane0_1920x1080_frame_001.raw)保存在程序运行的目录下(退出程序后执行 ls -l pipe0_plane0_1920x1080_frame_* 可以查看),并打印用户可以使用的命令,运行过程如下:
chmod +x get_sif_data
./get_sif_data
D-Robotics Sensor Test Tools V1.0
********************** Sensor Lists *************************
0 -- IMX415
1 -- F37
*************************************************************
Please select :1 # 选择 sensor
... ... # 一大段初始化日志
normal pipe_id (0)type(9)frame_id(1)buf_index(0)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(1),plane(1)size(2592000) # 获取第一帧图像
filedump(pipe0_plane0_1920x1080_frame_001.raw, size(2592000) is successed
time cost 85 ms
dumpToFile raw cost time 85 ms********************** Command Lists *************************
q -- quit
g -- get one frame
l -- get a set frames
h -- print help message
Command:
命令解释:
- g: 获取一帧图像,支持输入多个
g来连续获取图像,例如输入gggg
Command: g
normal pipe_id (0)type(9)frame_id(4078)buf_index(5)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(4078),plane(1)size(2592000)
filedump(pipe0_plane0_1920x1080_frame_4078.raw, size(2592000) is successed
time cost 67 ms
dumpToFile raw cost time 67 ms
- l: 连续获取12帧图像,相当于输入12个
g
Command: l
normal pipe_id (0)type(9)frame_id(4588)buf_index(3)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(4588),plane(1)size(2592000)
filedump(pipe0_plane0_1920x1080_frame_4588.raw, size(2592000) is successed
time cost 56 ms
... ... # 连续的获取帧数据的打印
dumpToFile raw cost time 56 msnormal pipe_id (0)type(9)frame_id(4609)buf_index(7)w x h(1920x1080) data_type 9 img_format 0
stride_size(2400) w x h1920 x 1080 size 2592000
pipe(0)dump normal raw frame id(4609),plane(1)size(2592000)
filedump(pipe0_plane0_1920x1080_frame_4609.raw, size(2592000) is successed
time cost 57 ms
dumpToFile raw cost time 57 ms
- q: 退出程序
Command: Command: q
quit
[ 256.825912] [S0][V1]sif_video_streamoff
[ 256.826439] SIF close node 1
[ 256.853045] [S0][V0]sif_video_streamoff SIF last process stream off
[ 256.853922] [S0][V0]sif_video_streamoff
[ 256.855476] hobot_dmcfreq_target: dmcfreq->rate:2666000000, target_rate:2666000000
[ 256.856460] buf:performance
[ 256.856460] , powersave_rate:2666000000, dmcfreq->pre_state:0
[ 256.857610] [S0][V0]x3_sif_close SIF last process close
[ 256.858301] SIF close node 0
[ 256.858807] [isp_drv]: camera_sys_stream_off: camera_sys_stream_off success line 1549 dev_name port_0
[ 256.860006] [isp_drv:cam]: camera_fop_release: line 115 port 0 user_num 0 camera_cdev->start_num 0
[ 256.861229] vps mipi_host1: sensor1_mclk set(1) 0 as 24000000
[ 256.861980] vps mipi_host1: sensor1_mclk set(0) 0 as 24000000
[ 256.862741] vps mipi_host0: sensor0_mclk set(2) 0 as 24000000
[ 256.863491] vps mipi_host0: sensor0_mclk set(1) 0 as 24000000
[ 256.864241] vps mipi_host0: sensor0_mclk set(0) 0 as 24000000
运行效果说明
执行程序后会获取到如 pipe0_plane0_1920x1080_frame_4609.raw 一样命名的raw图像,或者如pipe0_1920x1080_frame_1024.yuv一样命名的yuv图像。
请使用 hobotplayer 工具浏览图像,图像的参数配置说明如下:
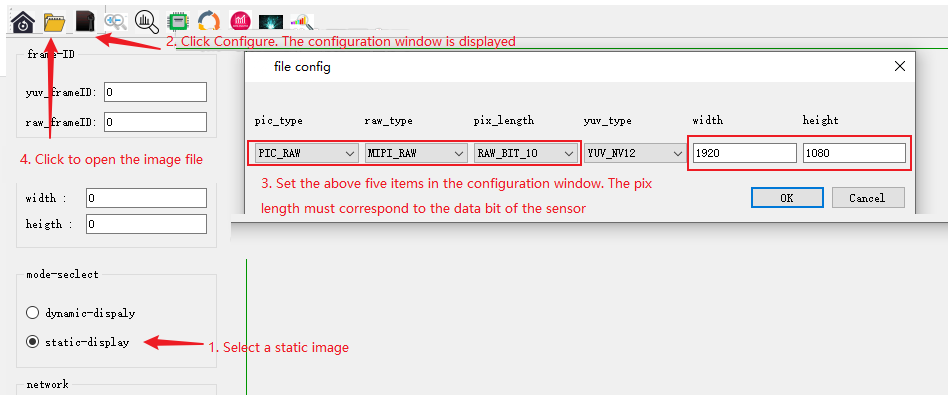
- 浏览RAW图
按照如下图所示步骤配置选项,其中file config里面关注pic_type、raw_type、 pix_length 、width和height的配置,F37 配置为(PIC_RAW、MIPI_RAW、RAW_BIT_10, 1920,1080),IMX415配置为(PIC_RAW、MIPI_RAW、RAW_BIT_12, 3840,2160)
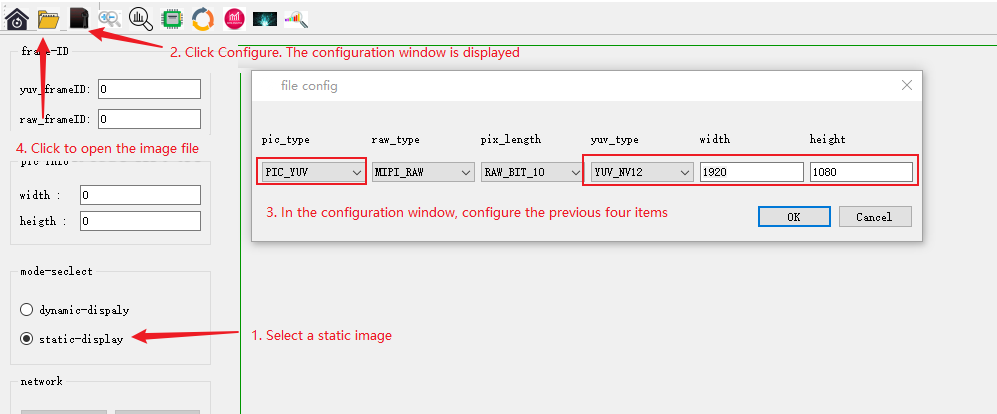
- 浏览YUV图
按照如下图所示步骤配置选项,其中file config里面关注pic_type、yuv_type、width和height的配置,F37 配置为(PIC_YUV、YUV_NV12, 1920,1080),IMX415配置为(YUV_NV12, 3840,2160)
get_isp_data 使用说明
程序功能
下图所示为X3M的视频数据通路框图,其中的专业名词解释请查看 多媒体开发概述-术语约定。
get_isp_data 完成 sensor 、MIPI CSI SIF 和 ISP 模块的初始化,实现从ISP模块获取视频帧数据的功能,支持从ISP模块获取YUV格式的图像。
get_isp_data 可以有效帮助用户调试sensor和X3M的ISP效果调试,在打通sensor -> SIF -> ISP 的数据通路后,再调试其他模块的功能。
程序开发
源码结构
源码位于 /app/multimedia_samples/get_isp_data
.
├── main.c # 主程序,完成sensor列表的加载,和命令控制
├── Makefile # 编译makefile
├── module.c
├── module.h
├── Readme.md
├── sensor_handle.c # sensor 初始化、从isp中获取图像的接口
├── sensor_handle.h
├── sensors # sensor参数配置,每个新sensor在本目录新增一个文件
│ ├── sensor_f37.c
│ └── sensor_imx415.c
└── sensors.lds
编译
当前代码通过一个Makefile文件配置编译,进�入源码目录,执行以下命令进行编译生成get_isp_data程序:
$ cd /app/multimedia_samples/get_sif_data
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
get_isp_data main.c main.o Makefile module.c module.h module.o Readme.md sensor_handle.c sensor_handle.h sensor_handle.o sensors sensors.lds
添加新sensor
如果有新sensor需要调试,请参考 sensors 目录下的源码文件,对应添加一个新的sensor配置即可。
以F37为例说明关键代码:
/*
* 添加sensor、mipi、sif dev、isp的参数配置
* 各结构体中参数在代码中有已经有比较详细的注释说明
*/
static int set_sensor_param(void)
{
printf("set_sensor_param\n");
/*定义 sensor 初始化的属性信息 */
snsinfo = SENSOR_1LANE_F37_30FPS_10BIT_LINEAR_INFO;
/*定义 mipi 初始化参数信息 */
mipi_attr = MIPI_1LANE_SENSOR_F37_30FPS_10BIT_LINEAR_ATTR;
/*定义 dev 初始化的属性信息 */
devinfo = DEV_ATTR_F37_LINEAR_BASE;
/*定义 pipe 属性信息 */
pipeinfo = PIPE_ATTR_F37_LINEAR_BASE;
/*定义 dis 属性信息 */
disinfo = DIS_ATTR_F37_BASE;
/*定义 ldc 属性信息 */
ldcinfo = LDC_ATTR_F37_BASE;
return sensor_sif_dev_init();
return 0;
}
/*
* 主程序遍历sensor模块时调用本函数完成sensor名和sensor参数配置接口的注册
*/
static int sensor_probe(void)
{
int i = 0;
/* 在sensor_lists里面找到一个空位置 */
for (i = 0; i < ARRAY_SIZE(sensor_lists); i++) {
if (0 == strlen(sensor_lists[i].sensor_tag)) break;
}
if (i >= ARRAY_SIZE(sensor_lists)) {
printf("sensor lists is full\n");
return -1;
}
strncpy(sensor_lists[i].sensor_tag, SENSOR_TAG, 31 > strlen(SENSOR_TAG) ? strlen(SENSOR_TAG) : 31);
sensor_lists[i].func = set_sensor_param;
return 0;
}
/* 注册sensor的模块入口,主程序在遍历sensor时会用到 */
SENSOR_MODULE_INSTALL(sensor_probe);
功能使用
硬件连接
RDK X3 开发板通过mipi host接口用于连接Sensor模组,请根据当前要调试的Sensor模组型号正确连接。
程序部署
按照上面的编译流程生成出get_isp_data后,执行该程序,根据提示选择当前连接在开发板上的sensor类别,比如当前连接的是 F37 sensor,则选择 1。
如果初始化成功,会自动获取第一帧图像(pipe0_1920x1080_frame_001.yuv)保存在程序运行的目录下(退出程序后执行 ls -l pipe0_1920x1080_frame_* 可以查看),并打印用户可以使用的命令,运行过程如下:
chmod +x get_isp_data
./get_isp_data
D-Robotics Sensor Test Tools V1.0
********************** Sensor Lists *************************
0 -- IMX415
1 -- F37
*************************************************************
Please select :1 # 选择 sensor
... ... # 一大段初始化日志
normal pipe_id (0)type(11)frame_id(1)buf_index(0)w x h(1920x1080) data_type 11 img_format 0
stride_size(2400) w x h1920 x 1080 size 2073600
pipe(0)dump normal yuv frame id(1),plane(1)size(2073600) # 获取第一帧图像
filedump(pipe0_1920x1080_frame_001.yuv, size(2073600) is successed
time cost 63 ms
dumpToFile yuv cost time 63 ms********************** Command Lists *************************
q -- quit
g -- get one frame
l -- get a set frames
h -- print help message
Command:
命令解释:
- g: 获取一帧图像,支持输入多个
g来连续获取图像,例如输入gggg
Command: g
normal pipe_id (0)type(11)frame_id(4078)buf_index(5)w x h(1920x1080) data_type 11 img_format 0
stride_size(2400) w x h1920 x 1080 size 2073600
pipe(0)dump normal yuv frame id(4078),plane(1)size(2073600)
filedump(pipe0_1920x1080_frame_4078.yuv, size(2073600) is successed
time cost 63 ms
dumpToFile yuv cost time 63 ms
- l: 连续获取12帧图像,相当于输入12个
g
Command: l
normal pipe_id (0)type(11)frame_id(4588)buf_index(3)w x h(1920x1080) data_type 11 img_format 0
stride_size(2400) w x h1920 x 1080 size 2073600
pipe(0)dump normal yuv frame id(4588),plane(1)size(2073600)
filedump(pipe0_1920x1080_frame_4588.yuv, size(2073600) is successed
time cost 56 ms
... ... # 连续的获取帧数据的打印
dumpToFile yuv cost time 56 msnormal pipe_id (0)type(11)frame_id(4609)buf_index(7)w x h(1920x1080) data_type 11 img_format 0
stride_size(2400) w x h1920 x 1080 size 2073600
pipe(0)dump normal yuv frame id(4609),plane(1)size(2073600)
filedump(pipe0_1920x1080_frame_4609.yuv, size(2073600) is successed
time cost 57 ms
dumpToFile yuv cost time 57 ms
- q: 退出程序
Command: Command: q
quit
[ 256.825912] [S0][V1]sif_video_streamoff
[ 256.826439] SIF close node 1
[ 256.853045] [S0][V0]sif_video_streamoff SIF last process stream off
[ 256.853922] [S0][V0]sif_video_streamoff
[ 256.855476] hobot_dmcfreq_target: dmcfreq->rate:2666000000, target_rate:2666000000
[ 256.856460] buf:performance
[ 256.856460] , powersave_rate:2666000000, dmcfreq->pre_state:0
[ 256.857610] [S0][V0]x3_sif_close SIF last process close
[ 256.858301] SIF close node 0
[ 256.858807] [isp_drv]: camera_sys_stream_off: camera_sys_stream_off success line 1549 dev_name port_0
[ 256.860006] [isp_drv:cam]: camera_fop_release: line 115 port 0 user_num 0 camera_cdev->start_num 0
[ 256.861229] vps mipi_host1: sensor1_mclk set(1) 0 as 24000000
[ 256.861980] vps mipi_host1: sensor1_mclk set(0) 0 as 24000000
[ 256.862741] vps mipi_host0: sensor0_mclk set(2) 0 as 24000000
[ 256.863491] vps mipi_host0: sensor0_mclk set(1) 0 as 24000000
[ 256.864241] vps mipi_host0: sensor0_mclk set(0) 0 as 24000000
运行效果说明
执行程序后会获取到如 pipe0_1920x1080_frame_4609.yuv 一样命名的yuv图像
请使用 hobotplayer 工具浏览图像,图像的参数配置说明如下:
- 浏览YUV图
按照如下图所示步骤配置选项,其中file config里面关注pic_type、yuv_type、width和height的配置,F37 配置为(PIC_YUV、YUV_NV12, 1920,1080),IMX415配置为(YUV_NV12, 3840,2160)
sample_isp 使用说明
程序功能
sample_isp程序完成isp图像接口初始化,主要功能是调用每一个isp图像进行接口动态设置/获取参数,并返回测试结果
程序开发
源码结构
源码位于/app/multimedia_samples/sample_isp
.
├── main.c # 主程序
├── Makefile # 编译makefile
└── Readme.md # 程序说明
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成 sample_isp
$ cd /app/multimedia_samples/sample_isp
$ make clean # ��清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
main.c main.o Makefile sample_isp
功能使用
程序部署
按照上面的编译流程生成出sample_isp后,运行该程序。
注意此程序运行前需要有当前的sensor程序在运行中,sensor的程序可以直接使用Sunrise_camera, sample_isp运行过程如下
chmod +x sample_isp
# ./sample_isp
============================================
APP: ./sample_isp
a: AE
b: AF
c: AWB
d: BL
e: DEMOSAIC
f: SHARPEN
g: GAMMA
h: IRIDIX
i: CNR
j: SINTER
k: TEMPER
l: SCENE_MODES
m: FIRMWARE STATE
n: MODULE CONTROL
o: REGISTER
p: LIBREG_AE
q: LIBREG_AWB
r: LIBREG_AF
s: METERING AE(read only)
t: METERING AWB(read only)
u: METERING AF(read only)
v: METERING AE_5BIN(read only)
w: METERING_DATA_TIME(read only)
x: SWITCH SCENCE
A: CSC
B: MESH SHADING
C: MESH SHADING LUT
D: RADIAL SHADING
E: RADIAL SHADING LUT
F: IRIDIX STRENGTH LEVEL
G: IDX_IRQ_SYNC
H: IDX_AWB_ZONE
I: IDX_AF_ZONE
L: IDX_AF_KERNEL
M: IDX_AEROI_INFO
N: IDX_LUMA_INFO
O: IDX_AEPARAM_INFO
J: IDX_AE5BIN_ZONE
K: IDX_AE_ZONE
P: IDX_AE_EX
y: Help
Q: Exit
============================================
ISP_TEST>
命令解释:
-
a: 获取/设置AE属性
-
b: 示例中暂不支持
-
c: 获取/设置AWB属性
-
d: 获取/设置BlackLevel属性
-
e: 获取/设置Demosaic属性
-
f: 获取/设置SHARPEN属性
-
g: 获取/设置GAMMA属性
-
h: 获取/设置IRIDIX属性
-
i: 获取/设置CNR属性
-
j: 获取/设置SINTER属性
-
k: 获取/设置TEMPER属性
-
l: 获取/设置SCENE_MODES属性
-
m: 获取/设置FWSTATE属性
-
n: 获取/设置ModuleControl属性
-
o: 获取/设置Register寄存器
-
p: 注册AE回调接口
-
q: 注册AWB回调接口
-
r: 注册AF回调接口
-
s: 获取AE统计信息
-
t: 获取AWB统计信息
-
u: 获取AF统计信息
-
v: 获取AE_5BIN统计信息
-
w: 获取最新的统计信息(代码里面默认获取AWB,可以仿照代码通过传参获取AE,AF统计信息)
-
x: 切换isp效果库(so库需�要跟isp_test文件同一目录)
-
A: 获取/设置CSC属性
-
B: 获取/设置MESH_SHADING属性
-
C: 获取/设置MESH SHADING LUT属性
-
D: 获取/设置RADIAL SHADING属性
-
E: 获取/设置RADIAL SHADING LUT属性
-
F: 获取/设置IRIDIX STRENGTH LEVEL属性
-
G: 获取帧同步开始/结束时间
-
H: 设置AWB_ZONE属性
-
I: 设置AF_ZONE属性
-
L: 获取/设置AF_KERNEL_INFO属性
-
M: 获取/设置AEROI信息
-
N: 获取LUMA信息
-
O: 获取/设置AEParam信息
-
J: 设置AE5BIN_ZONE属性
-
K: 设置AEZONE属性
-
P: 获取/设置AE额外属性
-
y: 帮助信息
-
Q: 退出程序
sample_vps 使用说明
程序功能
sample_vps 程序使用一个 vps grp 的多个不同通道,对 YUV 图像进行裁剪,旋转,缩放等操作,展示 vps 的基本用法。更多丰富的 vps 图像处理使用请参考视频处理章节。
程序开发
源码结构
源码位于:/app/multimedia_samples/sample_vps
.
|-- 19201080.yuv # 回灌使用NV12格式文件
|-- main.c # 主程序
`-- Makefile # 编译makefile
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成sample_vps
$ cd /app/multimedia_samples/sample_vps
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
19201080.yuv main.c main.o Makefile sample_vps
功能使用
程序部署
按照上面的编译流程生成出 sample_vps ,确保当前目录下存在19201080.yuv,然后执行程序 ./sample_vps
运行效果说明
YUV 图片通过回灌方式,利用 vps 进行裁剪,旋转,缩放等功能,保存对应处理后的 YUV 图像。
grp_0_chn_1_out_1280_720.yuv为原图裁剪到1280x720分辨率;grp_0_chn_2_out_1088_1920.yuv为原图旋转90度的图像;grp_0_chn_3_out_960_540.yuv为原图缩小到960x540分辨率;grp_0_chn_5_out_2880_1620.yuv为原图放大到2880x1620分辨率;
sample_vps_zoom 使用说明
程序功能
sample_vps_zoom 程序使用 vps 的硬件模块 ipu 和 pym 对 YUV 图像中的部分区域做多倍放大处理,对处理后的 YUV图像编码成 H264 视频流,可以直接使用 MPC-BE 等工具进行预览,类似电子云台中的zoom 功能。整个程序的 Pipeline 如下图所示:
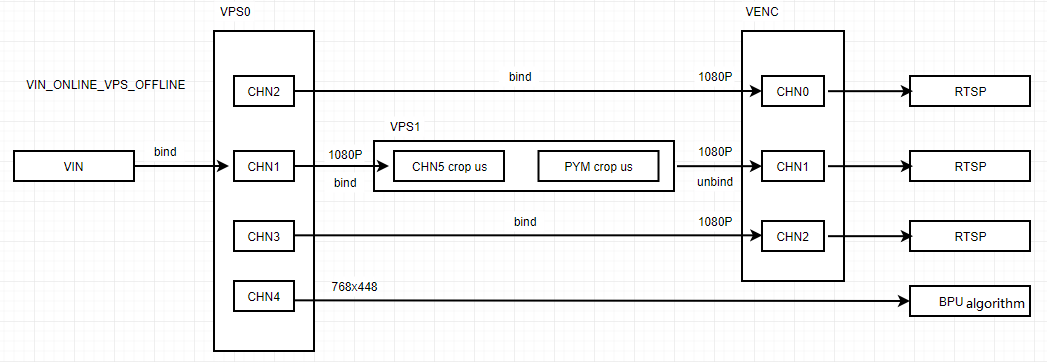
如 Pipeline 所示,程序通过 vps0 读取 YUV 图像,vps0 chn1 和 vps1 绑定,通过 ipu 和 pym 做 crop 及放大后,将数据送给 venc 的 chn1 做 H264 编码,形成 zoom 放大的效果,同时 vps0 chn2 和 venc chn0 绑定做 H264 编码, vps0 chn3 和 venc chn2 绑定做 H264 编码。
程序开发
源码结构
源码位于:/app/multimedia_samples/sample_vps_zoom
.
|-- 19201080.yuv # 回灌使用NV12格式文件
|-- main.c # 主程序
`-- Makefile # 编译makefile
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成sample_vps_zoom程序:
$ cd /app/multimedia_samples/sample_vps_zoom
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
19201080.yuv main.c main.o Makefile sample_vps_zoom
功能使用
程序部署
按照上面的编译流程生成出 sample_vps_zoom,确保当前目录下存在 19201080.yuv 文件
执行程序 ./sample_vps_zoom
运行效果说明
YUV 图片通过回灌方式,利用 ipu, pym, venc 模块编码成平滑放大的zoom H264 码流。效果如下所示。
sample_osd 使用说明
程序功能
sample_osd 程序用于给 vps 通道输出的 YUV 数据叠加时间戳,汉语文字 osd。更多丰富的 osd 图像处理使用请参考区域处理章节。
程序开发
源码结构
源码位于:/app/multimedia_samples/sample_osd
.
|-- 1280720.yuv # 回灌使用NV12格式文件
|-- main.c # 主程序
|-- Makefile # 编译makefile
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成sample_osd程序
$ cd sample/sample_osd
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
1280720.yuv main.c main.o Makefile sample_osd
功能使用
程序部署
按照上面的编译流程生成出sample_osd后,确保当前目录下面存在1280720.yuv,执行sample_osd
#v## 运行效果说明
通过 osd 叠加后 vps 通道输出的的 YUV 图像如下图所示:

sample video codec 使用说明
程序功能
sample_vdec_basic 实现最基础解码功能,读取本地H264/H265/JPEG文件,进行解码保存NV12结果
sample_venc_basic 实现最基础编码功能,读取NV12图像,编码为H264(或H265或JPEG),并保存为本地文件
sample_vdec_two_channel 面向需要多通道同时解码的场景,在sample_vdec_basic 基础上增加一路解码通道,实现双通道解码功能。读取本地H264/H265/JPEG文件,两路同时进行解码分别保存NV12文件。
sample_venc_two_channel 面向需要多通道同时编码的场景,在sample_venc_basic 基础上增加一路编码通道,实现双通道编码功能。读取本地NV12文件,两路同时进行解码分别保存H264(或H265或JPEG)。
程序开发
源码结构
源码位于:/app/multimedia_samples/sample_video_codec
.
├── example_vdec_basic
├── example_vdec_two_channel
├── example_venc_basic
├── example_venc_two_channel
├── Makefile
├── README.md
├── sample_vdec_basic.c
├── sample_vdec_two_channel.c
├── sample_venc_basic.c
└── sample_venc_two_channel.c
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成sample_venc_basic、sample_vdec_basic、sample_vdec_two_channel、sample_venc_two_channel程序
$ cd /app/multimedia_samples/sample_video_codec
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
example_vdec_basic example_venc_basic Makefile sample_vdec_basic sample_vdec_two_channel sample_venc_basic sample_venc_two_channel
example_vdec_two_channel example_venc_two_channel README.md sample_vdec_basic.c sample_vdec_two_channel.c sample_venc_basic.c sample_venc_two_channel.c
程序部署
sample_vdec_basic
按照上面的编译流程生成出sample_vdec_basic程序之后
执行 ./sample_vdec_basic -w width -h height -t ecode_type -f file
其中width为图像宽所包含像素个数
height为为图像高所包含的像素格式
encode_type可以为h264\h265\jpeg
file为要解码的文件名
sample_venc_basic
按照上面的编译流程生成出sample_venc_basic程序之后
执行 ./sample_venc_basic -w width -h height -t ecode_type -f file0 -g file1
其中width为图像宽所包含像素个数
height为为图像高所包含的像素格式
ecode_type可以为h264\h265\jpeg
file0为要编码的文件名需要为NV12格式
file1为要编码的文件名需要为NV12格式,其width和height需要和file0保持一样
sample_vdec_two_channel
按照上面的编译流程生成出sample_vdec_two_channel程序之后
执行 ./sample_vdec_two_channel -w width -h height -t ecode_type -f file
其中width为图像宽所包含像素个数
height为为图像高所包含的像素格式
encode_type可以为h264\h265\jpeg
file为要解码的文件名
sample_venc_two_channel
按照上面的编译流程生成出sample_venc_two_channel程序之后
执行 ./sample_venc_two_channel -w width -h height -t ecode_type -f file0 -g file1
其中width为图像宽所包含像素个数
height为为图像高所包含的像素格式
ecode_type可以为h264\h265\jpeg
file0为要编码的文件名需要为NV12格式
file1为要编码的文件名需要为NV12格式,其width和height需要和file0保持一样
运行效果说明
sample_vdec_basic
root@ubuntu:/app/multimedia_samples/sample_video_codec# ./sample_vdec_basic -w 1920 -h 1080 -t h264 -f 1080P.h264
mmzAlloc paddr = 0x1769a000, vaddr = 0x7fa49ac000 i = 0
mmzAlloc paddr = 0x17b8d000, vaddr = 0x7fa44b9000 i = 1
mmzAlloc paddr = 0x18080000, vaddr = 0x7fa42be000 i = 2
mmzAlloc paddr = 0x1827b000, vaddr = 0x7fa40c3000 i = 3
mmzAlloc paddr = 0x18634000, vaddr = 0x7f97790000 i = 4
try open
do while
[pstStream] pts:0, vir_ptr:548222451712, size:71225
feed raw data
do while
[pstStream] pts:1, vir_ptr:548217262080, size:29880
feed raw data
do while
vdec 1, 1920x1080
[pstStream] pts:2, vir_ptr:548215185408, size:20136
feed raw data
......
......
......
do while
[pstStream] pts:146, vir_ptr:548064448512, size:14653
feed raw data
do while
[pstStream] pts:147, vir_ptr:548062371840, size:14555
feed raw data
do while
[pstStream] pts:148, vir_ptr:548057182208, size:15637
feed raw data
do while
[pstStream] pts:149, vir_ptr:548051447808, size:15966
feed raw data
do while
There is no more input data, 0!
mmzFree paddr = 0x1769a000, vaddr = 0x7fa016d000 i = 0
mmzFree paddr = 0x17b8d000, vaddr = 0x7f9b2fd000 i = 1
mmzFree paddr = 0x18080000, vaddr = 0x7f9b102000 i = 2
mmzFree paddr = 0x1827b000, vaddr = 0x7f9ac0f000 i = 3
mmzFree paddr = 0x18634000, vaddr = 0x7f9a697000 i = 4
[ERROR]["vdec"][video/src/hb_vdec.c:743] [540.920523]HB_VDEC_GetFrame[743]: [HB_VDEC] HB_VDEC_GetFrame:743 Failed VdChn = 0 s32Ret = -269024268
HB_VDEC_GetFrame failed:-269024268
vp exit ok!
Done
The program exited normally. If you encounter a Get_Frame error, it may be because the file has already been read. Please check.
输出 log 显示不断在将逐帧处理,最后的 LOG 打印也显示程序正常退出 , 末尾附近出现的 HB_VDEC_GetFrame Failed 代表已经读不到输入的数据了,说明可能到了文件末尾。
该程序执行完成之后,在当前运行目录会生成 decode.nv12 文件,该文件内容随着解码内容更新。
sample_venc_basic
root@ubuntu:/app/multimedia_samples/sample_video_codec# ./sample_venc_basic -w 1920 -h 1080 -t h265 -f 1080P_file1.nv12 -g 1080P_file2.nv12
feed encode data thread running
m_VencChnAttr.stRcAttr.enRcMode = 5 mmmmmmmmmmmmmmmmmm
u32VbvBufferSize = 10 mmmmmmmmmmmmmmmmmm
buf:y: vaddr = 0x7f983e5000 paddr = 0x173da000; uv: vaddr = 0x7f982e7000, paddr = 0x178cd000
get encode data thread running
buf:y: vaddr = 0x7f915dc000 paddr = 0x18fdd000; uv: vaddr = 0x7f980e8000, paddr = 0x191d8000
^C[ERROR]["multimedia"][src/vdi/linux/vdi_osal.c:174] [ERROR][7838.68423][7015:7021][TASK] MCTaskDequeueOutputBufferLocked The component(stream_reader) has been terminated!
[ERROR]["venc"][video/src/hb_venc.c:982] [7838.689759]HB_VENC_GetStream[982]: [HB_VENC] HB_VENC_GetStream:982 Failed VeChn = 0 s32Ret = -268958720
HB_VENC_GetStream failed. ret=-268958720
Done
root@ubuntu:/app/multimedia_samples/sample_video_codec#
上述效果我们可以看到使用命令 ./sample_venc_basic -w 1920 -h 1080 -t h265 -f 1080P_file1.nv12 -g 1080P_file2.nv12 将 1080P_file1.nv12 和 1080P_file2.nv12 的图像编码成 h265 文件, 按下 ctrl+c 之后停止运行,中止循环编码过程,HB_VENC_GetStream 会获取不到数据,抛出应有的 LOG 打印。
程序结束之后,在当前运行目录下生成sample_venc.h264/sample_venc.h265/sample_venc.jpg。H264/H265文件内容为交替显示是file1和file2
sample_vdec_two_channel
root@ubuntu:/app/multimedia_samples/sample_video_codec# ./sample_vdec_two_channel -w 1920 -h 1080 -t h264 -f 1920x1080.h264
mmzAlloc paddr = 0x173a2000, vaddr = 0x7f935f5000 i = 0
mmzAlloc paddr = 0x17895000, vaddr = 0x7f93102000 i = 0
mmzAlloc paddr = 0x18080000, vaddr = 0x7f92c0f000 i = 1
mmzAlloc paddr = 0x18573000, vaddr = 0x7f92424000 i = 1
mmzAlloc paddr = 0x18d5e000, vaddr = 0x7f91c39000 i = 2
mmzAlloc paddr = 0x19117000, vaddr = 0x7f916c1000 i = 2
mmzAlloc paddr = 0x19312000, vaddr = 0x7f914c6000 i = 3
mmzAlloc paddr = 0x1950d000, vaddr = 0x7f912cb000 i = 3
mmzAlloc paddr = 0x19852000, vaddr = 0x7f910d0000 i = 4
mmzAlloc paddr = 0x19c0b000, vaddr = 0x7f90d17000 i = 4
try open
try open
[pstStream] pts:0, vir_ptr:547928154112, size:40
feed raw data
[pstStream] pts:0, vir_ptr:547933343744, size:40
feed raw data
[pstStream] pts:1, vir_ptr:547914661888, size:110529
feed raw data
[pstStream] pts:1, vir_ptr:547922964480, size:110529
feed raw data
[pstStream] pts:2, vir_ptr:547900624896, size:54178
feed raw data
[pstStream] pts:2, vir_ptr:547906359296, size:54178
feed raw data
[pstStream] pts:3, vir_ptr:547896471552, size:9596
feed raw data
[pstStream] pts:3, vir_ptr:547898548224, size:9596
......
......
......
feed raw data
[pstStream] pts:29, vir_ptr:547890491392, size:2444
feed raw data
[pstStream] pts:29, vir_ptr:547894394880, size:2444
feed raw data
[pstStream] pts:30, vir_ptr:547928154112, size:33999
feed raw data
[pstStream] pts:30, vir_ptr:547933343744, size:33999
feed raw data
[pstStream] pts:31, vir_ptr:547914661888, size:8696
feed raw data
[pstStream] pts:31, vir_ptr:547922964480, size:8696
feed raw data
[pstStream] pts:32, vir_ptr:547900624896, size:3833
feed raw data
[pstStream] pts:32, vir_ptr:547906359296, size:3833
feed raw data
[pstStream] pts:33, vir_ptr:547896471552, size:1214
feed raw data
[pstStream] pts:33, vir_ptr:547898548224, size:1214
feed raw data
^CmmzFree paddr = 0x17895000, vaddr = 0x7f93102000 i = 0
mmzFree paddr = 0x18573000, vaddr = 0x7f92424000 i = 1
mmzFree paddr = 0x173a2000, vaddr = 0x7f935f5000 i = 0
mmzFree paddr = 0x19117000, vaddr = 0x7f916c1000 i = 2
mmzFree paddr = 0x18080000, vaddr = 0x7f92c0f000 i = 1
mmzFree paddr = 0x1950d000, vaddr = 0x7f912cb000 i = 3
mmzFree paddr = 0x18d5e000, vaddr = 0x7f91c39000 i = 2
mmzFree paddr = 0x19c0b000, vaddr = 0x7f90d17000 i = 4
mmzFree paddr = 0x19312000, vaddr = 0x7f914c6000 i = 3
mmzFree paddr = 0x19852000, vaddr = 0x7f910d0000 i = 4
[ERROR]["vdec"][video/src/hb_vdec.c:743] [1636.753595]HB_VDEC_GetFrame[743]: [HB_VDEC] HB_VDEC_GetFrame:743 Failed VdChn = 0 s32Ret = -269024268
HB_VDEC_GetFrame failed:-269024268
[ERROR]["vdec"][video/src/hb_vdec.c:743] [1636.756613]HB_VDEC_GetFrame[743]: [HB_VDEC] HB_VDEC_GetFrame:743 Failed VdChn = 1 s32Ret = -269024268
HB_VDEC_GetFrame failed:-269024268
vp exit ok!
Done
root@ubuntu:/app/multimedia_samples/sample_video_codec#
在 h264 文件符合要求的情况下,我们执行类似 ./sample_vdec_two_channel -w 1920 -h 1080 -t h264 -f 1920x1080.h264 这样的命令,可以看到 LOG 显示,一直在解码,程序会通过两个解码通道分别执行,在按下 ctrl + c 之后,程序结束,并且会在当前运行目录下生成sample_decode_ch0.nv12和sample_decode_ch1.nv12,该文件内容随着解码内容更新。
sample_venc_two_channel
root@ubuntu:/app/multimedia_samples/sample_video_codec# ./sample_venc_two_channel -w 1920 -h 1080 -t h264 -f 1080P_file1.nv12 -g 1080P_file2.nv12
feed encode data thread running
m_VencChnAttr.stRcAttr.enRcMode = 5 mmmmmmmmmmmmmmmmmm
u32VbvBufferSize = 10 mmmmmmmmmmmmmmmmmm
get encode data thread running
buf:y: vaddr = 0x7f90005000 paddr = 0x176d2000; uv: vaddr = 0x7f8a3da000, paddr = 0x17bc5000
feed encode data thread running
m_VencChnAttr.stRcAttr.enRcMode = 5 mmmmmmmmmmmmmmmmmm
u32VbvBufferSize = 10 mmmmmmmmmmmmmmmmmm
buf:y: vaddr = 0x7f88087000 paddr = 0x1830b000; uv: vaddr = 0x7f7b6f2000, paddr = 0x18af6000
get encode data thread running
buf:y: vaddr = 0x7f78758000 paddr = 0x1ac18000; uv: vaddr = 0x7f7845f000, paddr = 0x1b00e000
buf:y: vaddr = 0x7f7855d000 paddr = 0x1ae13000; uv: vaddr = 0x7f78361000, paddr = 0x1b10c000
^C[ERROR]["multimedia"][src/vdi/linux/vdi_osal.c:174] [ERROR][2770.31880][5508:5520][TASK] MCTaskDequeueOutputBufferLocked The component(stream_reader) has been terminated!
[ERROR]["multimedia"][src/vdi/linux/vdi_osal.c:174] [ERROR][2770.31897][5508:5514][TASK] MCTaskDequeueOutputBufferLocked The component(stream_reader) has been terminated!
[ERROR]["venc"][video/src/hb_venc.c:982] [2770.325412]HB_VENC_GetStream[982]: [HB_VENC] HB_VENC_GetStream:982 Failed VeChn = 0 s32Ret = -268958720
HB_VENC_GetStream failed. ret=-268958720
[ERROR]["venc"][video/src/hb_venc.c:982] [2770.327741]HB_VENC_GetStream[982]: [HB_VENC] HB_VENC_GetStream:982 Failed VeChn = 1 s32Ret = -268958720
HB_VENC_GetStream failed. ret=-268958720
Done
root@ubuntu:/app/multimedia_samples/sample_video_codec#
上述效果我们可以看到使用命令 ./sample_venc_two_channel -w 1920 -h 1080 -t h264 -f 1080P_file1.nv12 -g 1080P_file2.nv12 将 1080P_file1.nv12 和 1080P_file2.nv12 编码成 h265 文件,按下 ctrl + c 会结束编码,结束期间,会出现 HB_VENC_GetStream 的打印。
程序结束后会在当前运行目录下生成 sample_venc_ch0.h264(sample_venc_ch0.h265/sample_venc_ch0.jpg) 和 sample_venc_ch1.h264(sample_venc_ch1.h265/sample_venc_ch1.jpg)两个通道的文件。H264/H265文件内容为交替显示是file1和file2。
sample_vot 使用说明
程序功能
sample_vot程序完成VOT模块的初始化,实现从当前目录读取一帧nv12的图片数据送到VOT的bt1120输出显示功能
程序开发
源码结构
源码位于:/app/multimedia_samples/sample_vot
.
├── 1280_720yuv8.yuv # 回灌使用720P的NV12格式文件
├── 1920_1080yuv8.yuv # 回灌使用1080P的NV12格式文件
├── Makefile # 编译makefile
├── Readme.md # 程序说明
└── vot.c # 主程序
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成sample_vot
cd /app/multimedia_samples/sample_vot
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
1280_720yuv8.yuv 1920_1080yuv8.yuv Makefile Readme.md sample_vot vot.c vot.o
功能使用
程序部署
按照上面的编译流程生成出sample_vot
执行程序 ./sample_vot 1080P30。
chmod +x sample_vot
root@x3sdbx3-samsung2G-3200:/userdata# ./sample_vot 1080P60
[ 26.051955] channel id is 0, enable is 0, reg value is 0x4ef00f.
[ 26.052744] channel id is 1, enable is 0, reg value is 0x4ef00f.
[ 26.053520] channel id is 2, enable is 0, reg value is 0x4ef00f.
[ 26.054339] channel id is 3, enable is 0, reg value is 0x4ef00f.
stLayer width:1920[ 26.055263] channel id is 0, enable is 1, reg value is 0x14ef00f.
stLayer height:1080
libiar: hb_disp_set_timing done!
stChnAttr priority :2
stChnAttr src width :1920
stChnAttr src height :1080
stChnAttr s32X :0
stChnAttr s32Y :0
stChnAttr u32DstWidth :1920
stChnAttr u32DstHeight :1080
[ 26.056165] iar_output_stream.
stCrop width :1920
stCrop height :1080
[ 26.059304] channel id is 0, enable is 1, reg value is 0x14ef00f.
framesize:3110400
(注意如果是X3 SDB生态板子,那么带的参数只支持1080P60/1080P30,如果是客户自己使用的sil902x的bt1120转换hdmi芯片,那么参数可以是如下:
1080P60
1080P59.94
1080P50
1080P30
1080P29.97
1080P25
1080I60
1080I59.94
1080I50
720P60
720P59.94
720P50
720P29.97)
运行效果说明
程序通过把1920_1080yuv8.yuv读到内存,并通过接口把数据送到VOT模块的bt1120接口,然后通过hdmi转换芯片输出hdmi效果到显示设备如下图

sample_lcd 使用说明
程序功能
sample_lcd程序完成VOT模块的初始化,实现从当前目录读取一帧NV12的图片数据送到VOT的midi-dsi输出到lcd屏幕显示
程序开发
源码结构
源码位于:/app/multimedia_samples/sample_lcd
.
├── 720x1280.yuv # 回灌使用NV12格式文件
├── Makefile # 编译makefile
├── Readme.md # 程序说明
└── vot.c # 主程序
编译
当前代码通过一个Makefile文件配置编译
进入源码目录,执行以下命令进行编译生成sample_lcd程序
$ cd /app/multimedia_samples/sample_lcd
$ make clean # 清理源码,保持干净的代码环境
$ make
... ... # 一大段编译打印
$ ls
720x1280.yuv vot.c vot.o Makefile sample_lcd
功能使用
程序部署
按照上面的编译流程生成出sample_lcd,确保当前目录下存在720x1280.yuv文件
执行程序 ./sample_lcd。
chmod +x sample_lcd
# ./sample_lcd
root@x3sdbx3-samsung2G-3200:/userdata# ./sample_lcd
libiar: hb_disp_set_timing done!
HB_VOT_SetChnAttr 0: 0
HB_VOT_EnableChn: 0
HB_VOT_EnableChn: 0
framesize:1382400
运行效果说明
程序通过把720x1280.yuv读到内存,并通过接口把数据送到VOT模块的midi-dsi接口,然后显示到lcd屏幕设备如下图
