7.3.6 视频处理
概述
VPS(Video Process System)是视频处理系统,支持对图像进行缩小、放大、裁剪、旋转、GDC矫正、帧率控制以及金字塔图像输出。
功能描述
基本概念
-
Group
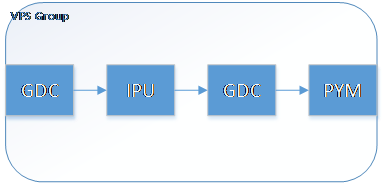
VPS对用户提供组的概念,各个Group分时复用IPU,GDC,PYM硬件,可以将多个VPS Group进行级联使用。 -
Channel
VPS的通道,一路通道代表VPS的一路输出。输出的通道主要分为普通图像通道和金字塔图像通道,普通通道输出缩放裁剪或旋转后的单层数据,金字塔通道输出多层金字塔缩放数据。
功�能描述
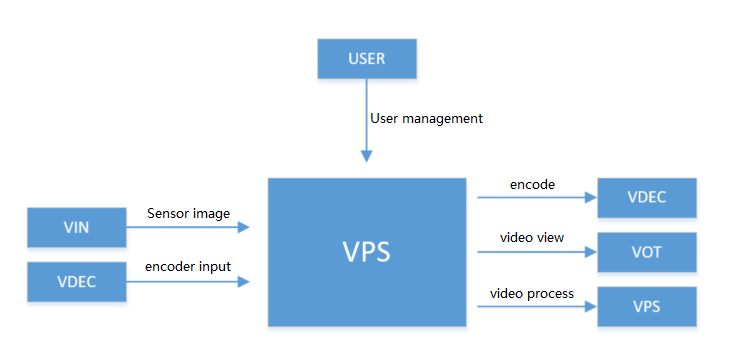
VPS可以通过调用 系统控制 提供的绑定接口与其他模块绑定,输入可以与VIN、VDEC模块绑定,VPS输出可以与VOT、VENC模块绑定,前者为VPS的输入源,后者为VPS的接收者,也可以与另一个VPS绑定实现更多的通道;支持处理用户回灌的图像数据。用户可以通过VPS接口对Group进行管理,每个Group仅可以与一个输入源绑定,每个Channel可以与不同的模块绑定。 VPS与VIN绑定场景下,需要调用HB_SYS_SetVINVPSMode 来配置VIN与VPS之间在线或离线的不同模式。
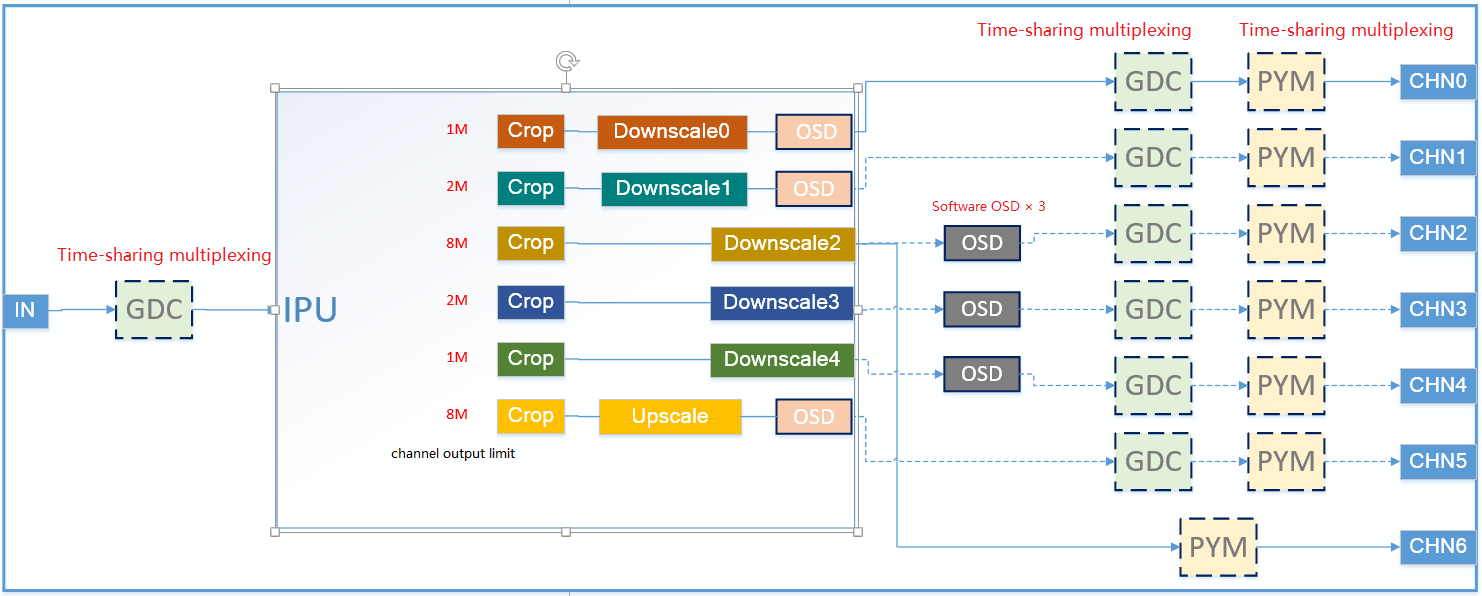
VPS硬件由一个IPU,一个PYM,两个GDC组成。共有7路输出Channel(chn0chn6),chn0chn4可以实现downscale,chn5可以实现upscale,chn0~chn5均可实现裁剪(ROI)、旋转、矫正、帧率控制,chn6为金字塔online Channel。虚框为硬件复用,其中OSD灰色块为CPU叠加,其余三个米色块为硬件叠加。
-
Upscale功能:
尺寸限制请参考下表
支持水平方向最大1.5倍放大,宽度需为4的倍数,最小32x32,最大4096
支持垂直方向最大1.5倍放大, 高度需为偶数,最小32x32,最大4096
只有channel5支持Upscale功能
-
Downscale功能:
尺寸限制参考下表
水平方向最大缩小为原尺寸的1/8(大于1/8), 最小32x32,最大4096
垂直方向最大缩小为原尺寸的1/8(大于1/8), 最小32x32,最大4096
Channel0~channel4支持Downscale功能
-
IPU各通道的尺寸限制如下:
| Scaler | FIFO(bytes) | Resolution(pixel) |
|---|---|---|
| Scaler 5 (IPU US) | 4096 | 8M |
| Scaler 2 (IPU DS2) | 4096 | 8M |
| Scaler 1 (IPU DS1) | 2048 | 2M |
| Scaler 3 (IPU DS3) | 2048 | 2M |
| Scaler 4 (IPU DS4) | 1280 | 1M |
| Scaler 0 (IPU DS0) | 1280 | 1M |
-
Crop功能:
VPS可以对输入的图形进行裁剪,选择裁剪后的ROI区域去做放大或者缩小 -
PYM金字塔处理功能:
最大输入图像宽度4096,最大输入图像高度4096
最小输入图像宽度64,最小输入图像高度64
最大输出图像宽度4096,最大输出图像高度4096
最小输�出图像宽度48,最小输出图像高度32
缩小图像层数24(0
23)层,其中0、4、8、12、16、20层为基础Base层,基础层每一层的size为上一层的1/2;其余层为ROI层,ROI层基于Base层作缩小(1、2、3层基于Base0层,5、6、7层基于Base4层,以此类推)各层可以单独使能,缩放区域、缩放系数可以配置放大图像层数为6(2429)层,放大比例固定,分别为1.28、1.6、2、2.56、3.2、4倍。PYM通道也可以为0~5,此时为非online通道。每一个group下最多使用一个
PYM。
注意事项
-
PYM硬件要求最少使能BASE0层与BASE4层; -
PYM在online输入(chn6)时,PYM ds所有层(023)累计输出数据量不得大于输入数据量的2.5倍,us层(2429)累计宽之和不得超过输入宽,否则会有未知风险; -
IPU绑定了PYM后,不能再绑定VOT/VPS/VENC等模块; -
Rotate旋转功能:VPS支持旋转90度、180度、270度,支持Group旋转与Chnnel旋转(二选一),Group旋转时VPS所有输出通道均旋转,Chnnel旋转可以将chn0~chn5中任意两路旋转,PYM处理过的通道不可以旋转。 -
Gdc矫正功能:VPS支持输入矫正文件作图形畸变矫正,支持Group矫正与Chnnel矫正(二选一),Group矫正时VPS所有输出通道均作矫正,Chnnel矫正可以在chn0~chn5中任意两路作矫正。 -
帧率控制功能:
VPS的channel0~5支持帧率控制,可以输出小于等于输入帧率的任意帧率。
API参考
HB_VPS_CreateGrp
【函数声明】
int HB_VPS_CreateGrp(int VpsGrp, const VPS_GRP_ATTR_S *grpAttr);
【功能描述】
创建一个VPS Group
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| grpAttr | Group属性指针 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
VPS最多可以创建8个Group;Group属性主要包含输入的宽、高和GDC的buf深度。
【参考代码】
VPS参考代码
HB_VPS_DestroyGrp
【函数声明】
int HB_VPS_DestroyGrp(int VpsGrp);
【功能描述】
销毁一个VPS Group
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
Group必须已经创建
【参考代码】
无
HB_VPS_StartGrp
【函数声明】
int HB_VPS_StartGrp(int VpsGrp);
【功能描述】
启动VPS Group处理
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
Group必须已经创建
【参考代码】
VPS参考代码
HB_VPS_StopGrp
【函数声明】
int HB_VPS_StopGrp(int VpsGrp);
【功能描述】
停止VPS Group处理
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
Group必须已经创建并且已经启动
【参考代码】
VPS参考代码
HB_VPS_GetGrpAttr
【函数声明】
int HB_VPS_GetGrpAttr(int VpsGrp, VPS_GRP_ATTR_S *grpAttr);
【功能描述】
获取VPS Group属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| grpAttr | 属性结构体指针 | 输出 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_SetGrpAttr
【函数声明】
int HB_VPS_SetGrpAttr(int VpsGrp, const VPS_GRP_ATTR_S *grpAttr);
【功能描述】
设置VPS Group属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| grpAttr | 属性结构体指针 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
VPS参考代码
HB_VPS_SetGrpRotate
【函数声明】
int HB_VPS_SetGrpRotate(int VpsGrp, ROTATION_E enRotation);
【功能描述】
设置VPS Group旋转功能,使VPS的所有输出都旋转
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| enRotation | 旋转参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
该接口需要在HB_VPS_SetChnAttr之前调用,GroupRotate使能之后禁止使能ChnRotate;isp绑定ipu必须得是offline模式
【参考代码】
VPS参考代码
HB_VPS_GetGrpRotate
【函数声明】
int HB_VPS_Get GrpRotate(int VpsGrp, ROTATION_E *enRotation);
【功能描述】
获取VPS Group旋转功能属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| enRotation | 旋转功能参数指针 | 输出 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_SetGrpRotateRepeat
【函数声明】
int HB_VPS_SetGrpRotateRepeat(int VpsGrp, ROTATION_E enRotation);
【功能描述】
动态组旋转:该接口会保存当前group及后面绑定的多个VPS group所有通道配置,根据传的enRotation,自动重新计算旋转后所有通道的尺寸、roi区域,重新初始化group,重新绑定VIN;
【参数描述】
| 参数名称 | 描述 | �输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| enRotation | 旋转参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
该接口暂时不支持配置过PYM的场景
【参考代码】
无
HB_VPS_SetGrpGdc
【函数声明】
int HB_VPS_SetGrpGdc(int VpsGrp, char* buf_addr, uint32_t buf_len, ROTATION_E enRotation)
【功能描述】
设置VPS Group GDC矫正功能,使VPS的所有输出都有矫正效果
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| buf_addr | 矫正文件地址 | 输入 |
| buf_len | 矫正文件长度 | 输入 |
| enRotation | 旋转参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
该接口需要在HB_VPS_SetChnAttr之前调用;根据不同的镜头,不同的畸变,不同的尺寸,需要传入不同矫正bin文件。
【参考代码】
VPS参考代码
HB_VPS_SendFrame
【函数声明】
int HB_VPS_SendFrame(int VpsGrp, void* videoFrame, int ms);
【功能描述】
向VPS发送数据
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| videoFrame | 图像数据指针;VPS回灌数据结构为hb_vio_buffer_t结构; | 输入 |
| ms | 超时参数 ms设为-1 时,为阻塞接口;0 时为 非阻塞接口;大于 0 时为超时等待时间,超时时间的 单位为毫秒(ms) | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
VPS参考代码
HB_VPS_SetChnAttr
【函数声明】
int HB_VPS_SetChnAttr(int VpsGrp, int VpsChn, const VPS_CHN_ATTR_S *chnAttr);
【功能描述】
设置VPS通道属性(设置IPU某个通道的输出尺寸)
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| chnAttr | 通道属性指针 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
该接口支持动态配置IPU的输出尺寸,动态配置需要在StartGrp之后调用该接口,动态配置的新尺寸不可以比第一次初始化配置的尺寸大。如果需要启动以后从小尺寸改到大尺寸,那么需要在StartVps之前调用两次该接口,第一次传最大size,第二次传最小size。
【参考代码】
VPS参考代码
HB_VPS_GetChnAttr
【函数声明】
int HB_VPS_GetChnAttr(int VpsGrp, int VpsChn, VPS_CHN_ATTR_S *chnAttr);
【功能描述】
获取VPS通道属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| chnAttr | 通道属性指针 | 输出 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_EnableChn
【函数声明】
int HB_VPS_EnableChn(int VpsGrp, int VpsChn);
【功能描述】
启用VPS通道
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
如果未使能通道,GetChnFrame接口获取不到图像
【参考代码】
VPS参考代码
HB_VPS_DisableChn
【函数声明】
int HB_VPS_DisableChn(int VpsGrp, int VpsChn);
【功能描述】
禁用VPS通道
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
VPS参考代码
HB_VPS_SetChnRotate
【函数声明】
int HB_VPS_SetChnRotate(int VpsGrp, int VpsChn, ROTATION_E enRotation);
【功能描述】
设置VPS通道图像固定角度旋转
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| enRotation | 旋转属性 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
SetChnRotate属性需要在SetChnAttr之后调用,最多同时支持两个CHN做旋转;启动以后也支持调用,可以动态控制通道旋转。
【参考代码】
VPS参考代码
HB_VPS_GetChnRotate
【函数声明】
int HB_VPS_GetChnRotate(int VpsGrp, int VpsChn, ROTATION_E *enRotation);
【功能描述】
获取VPS通道图像旋转属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| enRotation | 旋转属性 | 输出 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_SetChnGdc
【函数声明】
int HB_VPS_SetChnGdc(int VpsGrp, int VpsChn, char* buf_addr, uint32_t buf_len, ROTATION_E enRotation)
【功能描述】
设置VPS chn GDC矫正功能
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | Channel号 | 输入 |
| buf_addr | 矫正文件地址 | 输入 |
| buf_len | 矫正文件长度 | 输入 |
| enRotation | 旋转参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
该接口需要在HB_VPS_SetChnAttr之后调用,最多同时支持两个CHN做矫正;根据不同的镜头,不同的畸变,不同的尺寸,需要传入不同矫正bin文件。
【参考代码】
VPS参考代码
HB_VPS_UpdateGdcSize
【函数声明】
int HB_VPS_UpdateGdcSize(int VpsGrp, int VpsChn, uint16_t out_width, uint16_t out_height)
【功能描述】
设置VPS GDC矫正输出尺寸(GDC输入输出尺寸默认是一致的,可以用该接口改变GDC输出的尺寸)
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | Channel号 | 输入 |
| out_width | 输出宽度 | 输入 |
| out_height | 输出高度 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
该接口需要在HB_VPS_SetChnGdc和HB_VPS_SetGrpGdc之后调用,传入的输出尺寸需要与矫正bin文件对应;出入的尺寸不能比当前GDC输入的尺寸大
【参考代码】
Group作gdc矫正时输出尺寸和输入尺寸不一致的场景:
ret = HB_VPS_SetGrpGdc(grp_id, bin_buf, buf_len, degree);
ret = HB_VPS_UpdateGdcSize(grp_id, 0, 1280, 720);
channel作gdc矫正时输出尺寸和输入尺寸不一致的场景:
ret = HB_VPS_SetChnGdc(grp_id, chn_id, bin_buf, buf_len, degree);
ret = HB_VPS_UpdateGdcSize(grp_id, 0, 1280, 720);
HB_VPS_SetChnCrop
【函数声明】
int HB_VPS_SetChnCrop(int VpsGrp, int VpsChn, const VPS_CROP_INFO_S *cropInfo)
【功能描述】
设置VPS Chn裁剪功能
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| cropInfo | 裁剪属性 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
需要在SetChnAttr之后调用;传入的ROI区域需要在IPU输入的size范围内;
【参考代码】
VPS参考代码
HB_VPS_GetChnCrop
【函数声明】
int HB_VPS_GetChnCrop(int VpsGrp, int VpsChn, VPS_CROP_INFO_S *cropInfo)
【功能描述】
获取VPS Chn固定角度旋转
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| cropInfo | 裁剪属性 | 输出 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_SetChnFrameRate
【函数声明】
int HB_VPS_SetChnFrameRate(int VpsGrp, int VpsChn, FRAME_RATE_CTRL_S *frameRate)
【功能描述】
设置VPS通道帧率
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| frameRate 帧率属性结构体 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_TriggerSnapFrame
【函数声明】
int HB_VPS_TriggerSnapFrame(int VpsGrp, int VpsChn, uint32_t frameCnt)
【功能描述】
抓拍帧;从当前帧开始标记frameCnt帧
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| frameCnt | 抓拍帧的个数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
启动以后才可以调用
【��参考代码】
无
HB_VPS_GetChnFrame
【函数声明】
int HB_VPS_GetChnFrame(int VpsGrp, int VpsChn, void *videoFrame, int ms);
【功能描述】
从通道获取一帧处理完的图像
【参数描述】
| 参数�名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| videoFrame | 图像信息 | 输出 |
| ms | 超时参数 ms设为-1 时,为阻塞接口; 0 时为 非阻塞接口; 大于 0 时为超时等待时间,超时时间的单位为毫秒(ms) | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
获取到的图像结构分为正常BUF结构(hb_vio_buffer_t)和金字塔BUF结构(pym_buffer_t)
【参考代码】
VPS参考代码
HB_VPS_GetChnFrame_Cond
【函数声明】
int HB_VPS_GetChnFrame_Cond(int VpsGrp, int VpsChn, void *videoFrame, int ms, int time);
【功能描述】
有条件的从通道获取一帧处理完的图像
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| videoFrame | 图像信�息 | 输出 |
| ms | 超时参数 ms设为-1 时,为阻塞接口; 0 时为 非阻塞接口; 大于 0 时为超时等待时间,超时时间的单位为毫秒(ms) | 输入 |
| time | 时间条件:为0表示从当前开始丢弃旧帧,等待获取新的一帧,其余值未作支持 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
获取到的图像结构分为正常BUF结构(hb_vio_buffer_t)和金字塔BUF结构(pym_buffer_t)
【参考代码】
VPS参考代码
HB_VPS_ReleaseChnFrame
【函数声明】
int HB_VPS_ReleaseChnFrame(int VpsGrp, int VpsChn, void *videoFrame);
【功能描述】
释放一帧通道图像
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| videoFrame | 图像信息 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
VPS参考代码
HB_VPS_SetPymChnAttr
【函数声明】
int HB_VPS_SetPymChnAttr(int VpsGrp, int VpsChn, const VPS_PYM_CHN_ATTR_S *pymChnAttr);
【功能描述】
设置金字塔通道属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| pymChnAttr | 金字塔通道属性指针 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
- 该接口支持动态配置PYM roi层的输出尺寸,需要在StartGrp之后调用该接口,动态配置的新roi size不可以比第一次初始化配置的size大。如果需要启动以后从小尺寸改到大尺寸,那么需要在StartVps之前调用两次该接口,第一次传最大size,第二次传最小size。
- 该接口同时支持动态配置PYM的输入尺寸,仅在PYM回灌时有效,支持StartGrp以后src尺寸从大改小。
【参考代码】
VPS参考代码
HB_VPS_GetPymChnAttr
【函数声明】
int HB_VPS_GetPymChnAttr(int VpsGrp, int VpsChn, VPS_PYM_CHN_ATTR_S *pymChnAttr);
【功能描述】
获取金字塔通道属性
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
| pymChnAttr | 金字塔通道属性指针 | 输出 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
【注意事项】
无
【参考代码】
无
HB_VPS_ChangePymUs
【函数声明】
int HB_VPS_ChangePymUs(int VpsGrp, uint8_t us_num, uint8_t enable)
【功能描述】
使能或关闭pym的us某一层
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| us_num | 金字塔us层 | 输入 |
| enable | 是使能 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
【注意事项】
无
【参考代码】
无
HB_VPS_GetChnFd
【函数声明】
int HB_VPS_GetChnFd(int VpsGrp, int VpsChn);
【功能描述】
获取VPS通道对应的设备文件描述符,获得的fd可以作select监听,select返回后可以直接通过getChnFrame接口获得图像。
【参数描述】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| VpsGrp | Group号 | 输入 |
| VpsChn | 通道号 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 正数值 | 成功 |
| 负值 | 失败 |
【注意事项】
无
【参考代码】
无
HB_VPS_CloseChnFd
【函数声明】
int HB_VPS_CloseChnFd(void);
【功能描述】
关闭VPS内所有的通道fd。
【参数描述】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| 非0 | 失败 |
【注意事项】
无
【参考代码】
无
VPS参考代码
grp_attr.maxW = 1280;
grp_attr.maxH = 720;
ret = HB_VPS_CreateGrp(grp_id, &grp_attr);
grp_attr.maxW = 1920;
grp_attr.maxH = 1080;
ret = HB_VPS_SetGrpAttr(grp_id, &grp_attr);
ret = HB_VPS_SetGrpRotate(grp_id, ROTATION_90);
ret = HB_VPS_SetGrpGdc(grp_id, bin_buf, bin_len, ROTATION_90);
chn_attr.enScale = 1;
chn_attr.width = 1280;
chn_attr.height = 720;
chn_attr.frameDepth = 8;
ret = HB_VPS_SetChnAttr(grp_id, chn_id, &chn_attr);
chn_crop_info.en = 1;
chn_crop_info.cropRect.x = 0;
chn_crop_info.cropRect.y = 0;
chn_crop_info.cropRect.width = 1280;
chn_crop_info.cropRect.height = 720;
ret = HB_VPS_SetChnCrop(grp_id, chn_id, &chn_crop_info);
ret = HB_VPS_EnableChn(grp_id, chn_id);
ret = HB_VPS_SetChnRotate(grp_id, chn_id, ROTATION_90);
ret = HB_VPS_SetChnGdc(grp_id, chn_id, bin_buf, bin_len, ROTATION_90);
pym_chn_attr.timeout = 2000;
pym_chn_attr.ds_layer_en = 24;
pym_chn_attr.us_layer_en = 0;
pym_chn_attr.frame_id = 0;
pym_chn_attr.frameDepth = 8;
ret = HB_VPS_SetPymChnAttr(grp_id, pym_chn, &pym_chn_attr);
ret = HB_VPS_StartGrp(grp_id);
ret = HB_VPS_SendFrame(grp_id, feedback_buf, 1000);
ret = HB_VPS_GetChnFrame(grp_id, chn_id, &out_buf, 2000);
ret = HB_VPS_ReleaseChnFrame(grp_id, chn_id, &out_buf);
ret = HB_VPS_DisableChn(grp_id, chn_id);
ret = HB_VPS_StopGrp(grp_id);
ret = HB_VPS_DestroyGrp(grp_id);
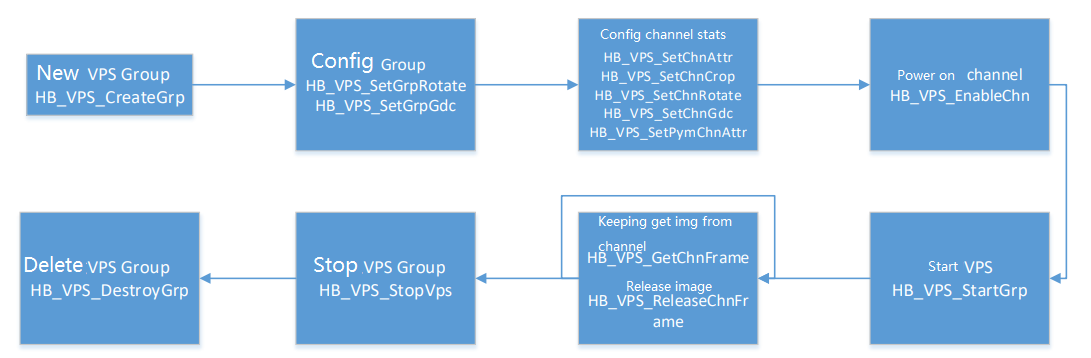
VPS接口调用流程
VPS初始化接口主要分为Group的初始化和Channel的初始化,Group的接口可视为全局配置,Group属性对整个VPS输出均生效,Channel的接口是用作对多个输出通道分别配置,配置的属性仅对当前channel有效;初始化时需要先配置Group属性,然后再分别配置每个channel属性。
VPS场景使用说明
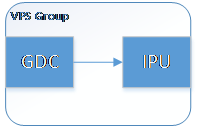
VPS内部主要由一个IPU、一个PYM、两个GDC共四个模块组成,根据接口的调用顺序将不同的模块动态绑定在一起,可以单独一个模块运行,也可以多个模块组合运行,不同的链接关系对应的接口调用流程如下:

如果仅用IPU一个模块,在创建Group之后只调用HB_VPS_SetChnAttr,如果需要IPU输出多个通道,那么需要多次调用该接口。

如果仅使用GDC一个模块,在创建Group之后调用HB_VPS_SetGrpGdc/Rotate接口。

如果仅使用PYM一个模块,在创建Group之后调用HB_VPS_SetPymChnAttr接口。
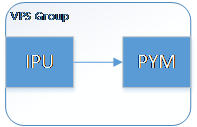
IPU作为第一个模块,PYM作为第二个模块,需要创建Group之后先调用HB_VPS_SetChnAttr,然后调用HB_VPS_SetPymChnAttr。
GDC放在IPU之前,先调用HB_VPS_SetGrpGdc/Rotate,再调用HB_VPS_SetChnAttr。
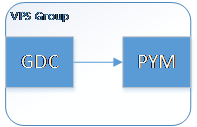
GDC放在PYM之前,先调用HB_VPS_SetGrpGdc/Rotate,再调用HB_VPS_SetPymChnAttr。
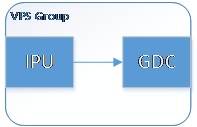
IPU放在GDC之前�,先调用HB_VPS_SetChnAttr,再调用HB_VPS_SetChnGdc/Rotate。
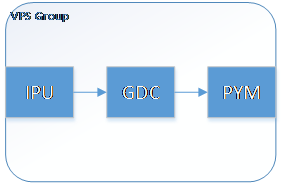
先IPU然后GDC再PYM的话,需要先调用HB_VPS_SetChnAttr,再调用HB_VPS_SetChnGdc/Rotate,最后调用HB_VPS_SetPymChnAttr。

如果需要IPU输出的多个通道分别接GDC和PYM,那么需要先调用HB_VPS_SetChnAttr(chnA)、HB_VPS_SetChnAttr(chnB),然后HB_VPS_SetChnGdc/Rotate(chnA),然后HB_VPS_SetPymChnAttr(chnB)。

HB_VPS_SetChnAttr(chnA)、HB_VPS_SetChnAttr(chnB),然后HB_VPS_SetChnGdc/Rotate(chnA),然后HB_VPS_SetChnGdc/Rotate(chnB),最后HB_VPS_SetPymChnAttr(chnB)。

HB_VPS_SetChnAttr(chnA)、HB_VPS_SetChnAttr(chnB)、HB_VPS_SetChnAttr(chnC),然后HB_VPS_SetChnGdc/Rotate(chnA) , HB_VPS_SetPymChnAttr(chnB),HB_VPS_SetChnGdc/Rotate(chnC)。
如果需要VPS中四个模块串一起跑,需要HB_VPS_SetGrpGdc、HB_VPS_SetChnAttr(chnA),HB_VPS_SetChnRotate(chnA)、HB_VPS_SetPymChnAttr(chnA)。
数据结构
HB_VPS_GRP_ATTR_S
【结构定义】
typedef struct HB_VPS_GRP_ATTR_S {
uint32_t maxW;
uint32_t maxH;
uint8_t frameDepth;
int pixelFormat;
} VPS_GRP_ATTR_S;
【功能描述】
VPS组的属性结构体
【成员说明】
| 成员 | 含义 |
|---|---|
| maxW | VPS输入图像最大宽度 |
| maxH | VPS输入图像最大高度 |
| frameDepth | Gdc申请的buf个数,如果是vps绑定了vot,需要注意frameDepth不能大于6,iar输入的buffer个数实际是8,gdc的话是framedepth+2,iar里面会判断gdc送过来index(下标从0开始算)不能大于等于8 |
| pixelFormat | 像素格式(VPS只支持nv12一种格式,当前参数预留) |
HB_RECT_S
【结构定义】
typedef struct HB_RECT_S {
uint16_t x;
uint16_t y;
uint16_t width;
uint16_t height;
} RECT_S;
【功能描述】
定义矩形区域
【成员说明】
| 成员 | 含义 |
|---|---|
| x | 起始x坐标 |
| y | 起始y坐标 |
| width | 图像宽 |
| height | 图像高 |
HB_VPS_CROP_INFO_S
【结构定义】
typedef HB_VPS_CROP_INFO_S {
bool en;
RECT_S cropRect;
} VPS_CROP_INFO_S;
【功能描述】
裁剪信息结构体
【成员说明】
| 成员 | 含义 |
|---|---|
| en | 裁剪是否使能 |
| cropRect | 裁剪的区域 |
HB_FRAME_RATE_CTRL_S
【结构定义】
typedef HB_FRAME_RATE_CTRL_S {
uint32 srcFrameRate;
uin32 dstFrameRate;
} FRAME_RATE_CTRL_S;
【功能描述】
帧率控制信息结构体,dstFrameRate不得大于srcFrameRate
【成员说明】
| 成员 | 含义 |
|---|---|
| srcFrameRate | 输入视频帧率 |
| dstFrameRate | 目标视频帧率 |
HB_VPS_CHN_ATTR_S
【结构定义】
typedef struct HB_VPS_CHN_ATTR_S {
uint32_t width;
uint32_t height;
int pixelFormat;
uint8_t enMirror;
uint8_t enFlip;
uint8_t enScale;
uint32_t frameDepth;
FRAME_RATE_CTRL_S frameRate;
} VPS_CHN_ATTR_S;
【功能描述】
通道输出属性结构体
【成员说��明】
| 成员 | 含义 |
|---|---|
| width | 图像输出宽 |
| height | 图像输出高 |
| pixelFormat | 像素格式(VPS目前输出只有nv12一种格式) |
| enMirror | 镜像使能,VPS不支持此功能,可以使用isp接口的HB_VIN_CtrlPipeMirror去水平镜像 |
| enFlip | 翻转使能,VPS不支持此功能,需要使用sensor的上下翻转 |
| enScale | 缩放使能 |
| frameDepth | 图像队列长度 |
| frameRate | 帧率控制(此帧率不生效,可以使用HB_VPS_SetChnFrameRate接口实现帧率控制) |
HB_ROTATION_E
【结构定义】
typedef enum HB_ROTATION_E {
ROTATION_0 = 0,
ROTATION_90 = 1,
ROTATION_180 = 2,
ROTATION_270 = 3,
ROTATION_MAX
} ROTATION_E;
【功能描述】
旋转枚举
【成员说明】
| 成员 | 含义 |
|---|---|
| ROTATION_0 | 不旋转 |
| ROTATION_90 | 旋转90度 |
| ROTATION_180 | 旋转180度 |
| ROTATION_270 | 旋转270度 |
| ROTATION_MAX | 枚举的最大值 |
DYNAMIC_SRC_INFO_S
【结构定义】
typedef struct HB_VPS_DYNAMIC_SRC_INFO_S {
uint8_t src_change_en;
uint16_t new_width;
uint16_t new_height;
} DYNAMIC_SRC_INFO_S;
【功能描述】
金字塔动态改变输入size配置结构体
【成员说明】
| 成员 | 含义 |
|---|---|
| src_change_en | 使能输入size改变 |
| new_width | 宽 |
| new_height | 高 |
HB_PYM_SCALE_INFO_S
【结构定义】
typedef struct HB_PYM_SCALE_INFO_S {
uint8_t factor;
uint16_t roi_x;
uint16_t roi_y;
uint16_t roi_width;
uint16_t roi_height;
} PYM_SCALE_INFO_S;
【功能描述】
金字塔裁剪缩放属性结构体
【成员说明】
| 成员 | 含义 |
|---|---|
| factor | 缩放参数(1~63),对于缩小得层,缩放公式是factor/(factor+64),对于放大得层对应是64/factor,因为放大层是固定的倍数,也即对应放大层24的factor固定是50,25层的factor固定是40,26层factor固定是32,27层factor固定是25,28层factor固定是20,29层factor固定是16 |
| roi_x | 起始x坐标 |
| roi_y | 起始y坐标 |
| roi_width | 图像宽 |
| roi_height | 图像高 |
HB_VPS_PYM_CHN_ATTR_S
【结构定义】
typedef struct HB_VPS_PYM_CHN_ATTR_S {
uint32_t frame_id;
uint32_t ds_uv_bypass;
uint16_t ds_layer_en;
uint8_t us_layer_en;
uint8_t us_uv_bypass;
int timeout;
uint32_t frameDepth;
DYNAMIC_SRC_INFO_S dynamic_src_info;
#define MAX_PYM_DS_NUM 24
#define MAX_PYM_US_NUM 6
PYM_SCALE_INFO_S ds_info[MAX_PYM_DS_NUM];
PYM_SCALE_INFO_S us_info[MAX_PYM_US_NUM];
} VPS_PYM_CHN_ATTR_S;
【功能描述】
辅助通道属性结构体
【成员说明】
| 成员 | 含义 |
|---|---|
| frame_id | 帧ID使能 |
| ds_uv_bypass | DS层uv分量bypass |
| ds_layer_en | DS层使能层数(4~23) |
| us_layer_en | US层使能层数(0~6) |
| us_uv_bypass | US层uv分量bypass |
| timeout | 超时时间 |
| frameDepth | 图像队列长度 |
| ds_info | DS缩放信息 |
| us_info | US缩放信息 |
HB_DIS_MV_INFO_S
【结构定义】
typedef struct HB_DIS_MV_INFO_S {
int gmvX;
int gmvY;
int xUpdate;
int yUpdate;
} DIS_MV_INFO_S;
【功能描述】
偏移信息结构体
【成员说明】
| 成员 | 含义 |
|---|---|
| gmvX | 横坐标偏移值 |
| gmvY | 纵坐标偏移值 |
| xUpdate | X更新值 |
| yUpdate | Y更新值 |
错误码
| 错误码 | 宏定义 | 描述 | | :----------: |: --------------------------- | :--------------------- | | -268,696,577 | HB_ERR_VPS_INVALID_GROUPID | 非法组号 | | -268,696,578 | HB_ERR_VPS_BUFMGR | 帧队列错误 | | -268,696,579 | HB_ERR_VPS_GROUP_FAIL | 组失败 | | -268,696,580 | HB_ERR_VPS_GROUP_UNEXIST | 组不存在 | | -268,696,581 | HB_ERR_VPS_CHN_UNEXIST | 通道不存在 | | -268,696,582 | HB_ERR_VPS_ROTATE | 旋转失败 | | -268,696,583 | HB_ERR_VPS_NULL_PARA | 参数NULL指针 | | -268,696,584 | HB_ERR_VPS_BAD_ARG | 非法参数 | | -268,696,585 | HB_ERR_VPS_UN_PREPARED | 未准备好 | | -268,696,586 | HB_ERR_VPS_SENDFRAME | 回灌图像失败 | | -268,696,587 | HB_ERR_VPS_CHN_DISABLE | 通道未使能 | | -268,696,588 | HB_ERR_VPS_TIMEOUT | 超时 | | -268,696,589 | HB_ERR_VPS_CHN_FD | 获取通道文件描述符失败 | | -268,696,590 | HB_ERR_VPS_SET_AFTER_START | 不允许启动以后配置 | | -268,696,591 | HB_ERR_VPS_SET_BEFORE_START | 不允许启动前配置 | | -268,696,592 | HB_ERR_VPS_SET_AT_WRONG_TIME | 在不允许时刻配置 | | -268,696,593 | HB_ERR_VPS_UN_SUPPORT_SIZE | 不支持的尺寸 | | -268,696,594 | HB_ERR_VPS_FRAME_UNEXIST | 不存在的帧图像 | | -268,696,595 | HB_ERR_VPS_DEV_FRAME_DROP | 硬件丢帧 | | -268,696,596 | HB_ERR_VPS_NOT_ENOUGH | 缓冲帧不够 | | -268,696,597 | HB_ERR_VPS_UN_SUPPORT_RATE | 不支持的帧率 | | -268,696,598 | HB_ERR_VPS_FRAME_RATE | 帧率错误 |
参考代码
VPS部分示例代码可以参考,sample_vps和sample_vps_zoom。