GPIO使用
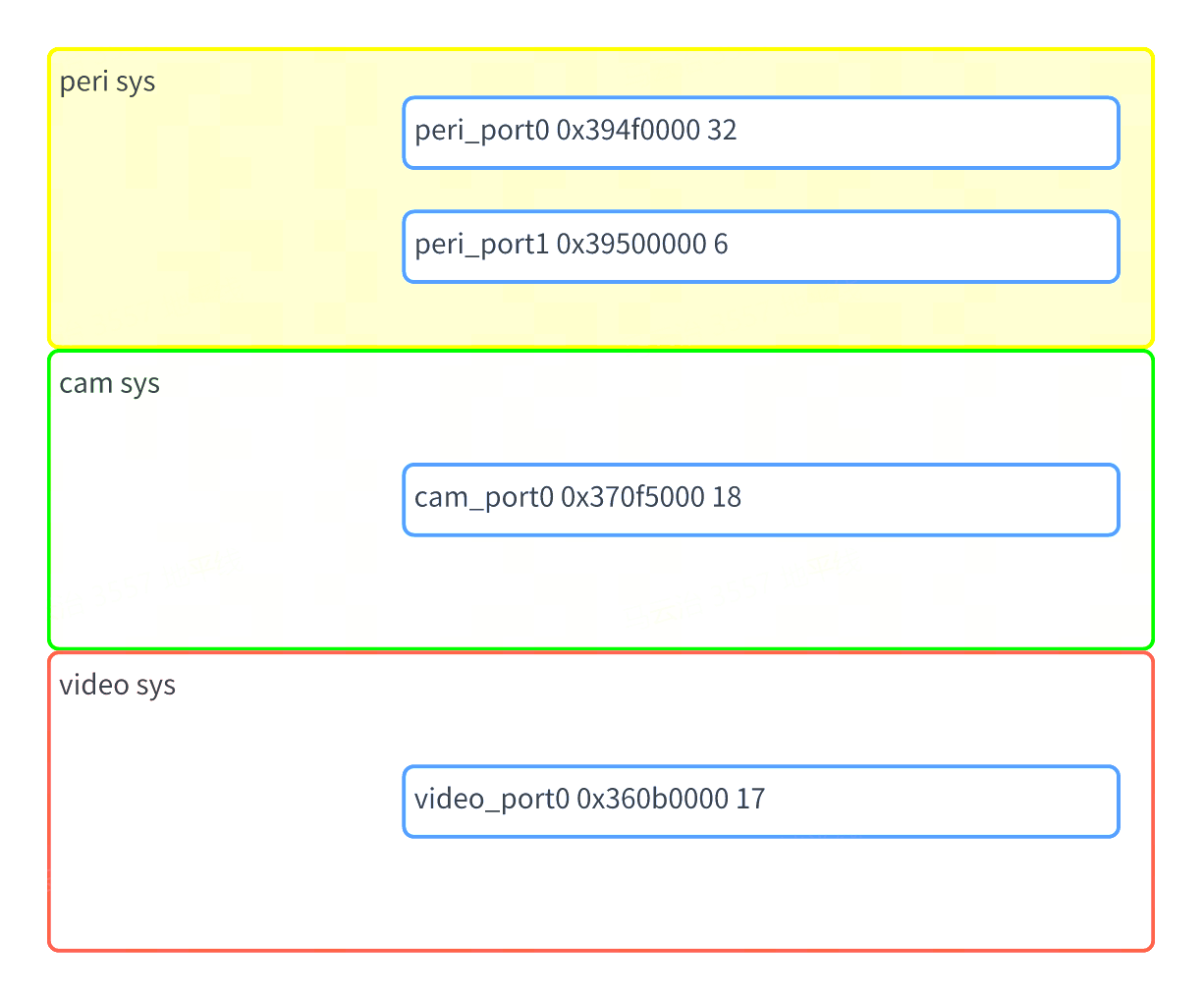
S100 Acore芯片内中共有3个sys有gpio设备,分别是peri, cam和video,每个设备最多有32个gpio引脚,并且每个gpio引脚都支持中断。
驱动代码
kernel/drivers/gpio/gpio-dwapb.c # gpio驱动源文件
内核配置
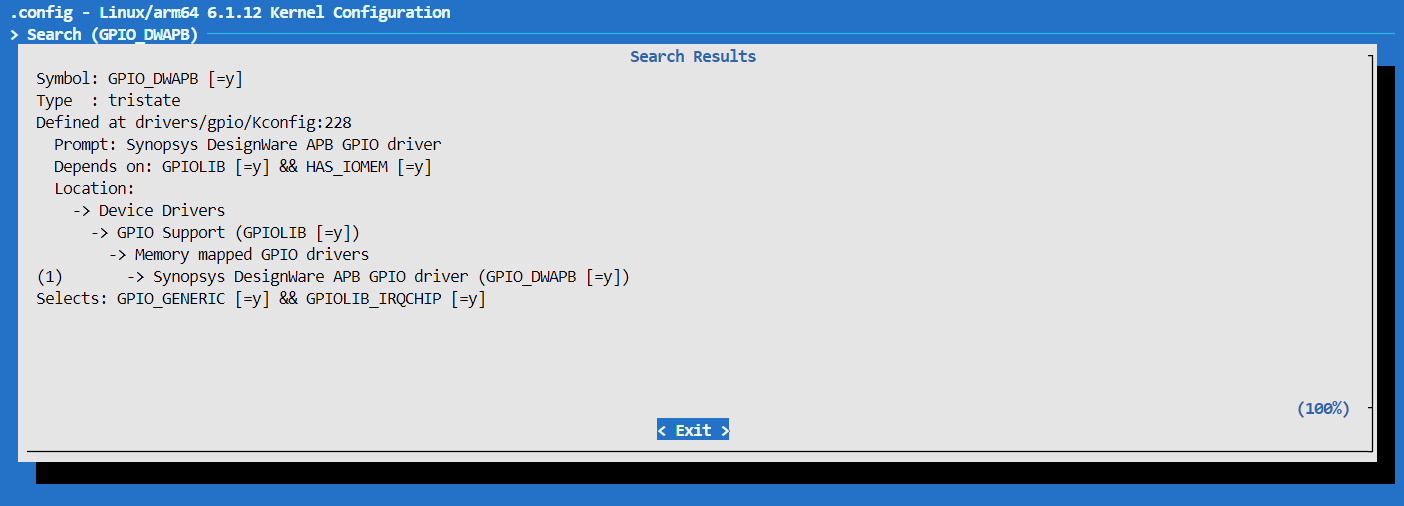
GPIO_DWAPB
内核DTS配置
S100 GPIO控制器的设备树定义位于SDK包的kernel文件夹下的arch/arm64/boot/dts/hobot/drobot-s100-soc.dtsi文件内。
s100.dtsi中的节点主要声明SoC共有特性,和具体电路板无关,一般情况下不用修改。
GPIO使用
Kernel Space
DTS配置
s100所有引脚的GPIO配置位于SDK包的kernel文件夹下路径为arch/arm64/boot/dts/hobot/drobot-s100-soc.dtsi的文件内。
用户需要配置特定引脚为GPIO功能时,可以直接引用预定义GPIO配置:
GPIO设备树节点的属性命名方式一般为<names>-gpios或<names>-gpio,举例如下:
/**
* peri_port0表示peri sys的第一个gpio设备
* 下列设备节点共有四个gpio引脚,分别是:
* peri sys的第一个gpio设备 16号引脚(从0开始)
* peri sys的第二个gpio设备 17号引脚(从0开始)
* cam sys的第一个gpio设备 28号引脚(从0开始)
* video sys的第一个gpio设备 18号引脚(从0开始)
* GPIO_ACTIVE_HIGH表示高电平有效,一般设为GPIO_ACTIVE_HIGH
*/
gpio-test {
test-gpios = <&peri_port0 16 GPIO_ACTIVE_HIGH
&peri_port1 17 GPIO_ACTIVE_HIGH
&cam_port0 28 GPIO_ACTIVE_HIGH
&video_port0 18 GPIO_ACTIVE_HIGH>;
};
驱动代码接口
/* include/linux/gpio.h */
/* 申请GPIO */
int gpio_request(unsigned gpio, const char *label);
/* GPIO初始化为输出。并设置输出电平*/
int gpio_direction_output(unsigned gpio, int value);
/* GPIO初始化为输入 */
int gpio_direction_input(unsigned gpio);
/* 获取GPIO的电平 */
int gpio_get_value(unsigned int gpio);
/* 设置GPIO的电平 */
void gpio_set_value(unsigned int gpio, int value);
/* 释放GPIO */
void gpio_free(unsigned gpio);
/* 申请GPIO中断,返回的值可以传给request_irq和free_irq */
int gpio_to_irq(unsigned int gpio);
User Space
控制接口
在用户层可以使用/sys/class/gpio节点来进行相关gpio的操作。
在sys节点下存在如下节点:
#申请gpio
echo <gpio_num> > /sys/class/gpio/export
#释放gpio
echo <gpio_num> > /sys/class/gpio/unexport
#设置gpio为输出
#当设置dir为out时,可以向value中echo 1/0,分别表示输入高低电平。
echo out > /sys/class/gpio/gpio<gpio_num>/direction
#设置高电平
echo 1 > /sys/class/gpio/gpio<gpio_num>/value
#设置低电平
echo 0 > /sys/class/gpio/gpio<gpio_num>/value
#设置gpio为输入, 当设置dir为in时,cat value表示输入的值(0-低,1-高)。
echo in > /sys/class/gpio/gpio<gpio_num>/direction
#读取gpio的外部值
cat /sys/class/gpio/gpio<gpio_num>/value
#查看gpio的debug接口
cat /sys/kernel/debug/gpio
#查看gpio和pinctrl的关系
#可以看到系统的引脚和gpio的号关系
cat /sys/kernel/debug/pinctrl/<pinctrl_dev>/gpio-ranges
sysfs接口介绍
export&unexport
/sys/class/gpio/export和/sys/class/gpio/unexport,这两个节点只能写不能读。
用户程序通过写入gpio的编号来向内核申请将某个gpio的控制权导出到用户空间,前提是没有内核代码申请这个gpio端口,如用户申请编号为480的GPIO的命令:
echo 480 > export
上述操作会为480号gpio创建一个节点gpio480,此时/sys/class/gpio目录下边生成一个gpio480的目录。
/sys/class/gpio/unexport和导出的效果相反,比如移除gpio480这个节点操作命令:
echo 480 > unexport #该操作将会移除gpio480这个节点,释放序号为480的gpio。
direction
其中direction表示gpio端口的方向,读取结果是in或out。也可以对该文件进行写操作,写入out时该gpio设为输出,写入in时该gpio设为输入。
value
当设置dir为in时,cat value表示输入的值(0-低,1-高)。
当设置dir为out时,可以向value中echo 1/0,分别表示输入高低电平。
edge
用户层设置中断时,direction需要设置为in,然后向edge中设置相应的值。
| edge的值 | 含义 |
|---|---|
| none | 表示引脚为输入,不是中断引脚 |
| rising | 表示引脚为中断输入,上升沿触发 |
| falling | 表示引脚为中断输入,下降沿触发 |
| both | 表示引脚为中断输入,边沿触发 |
调试
cat /sys/kernel/debug/gpio
查询上述节点,可以获取到当前系统中正在使用的gpio和所处的状态(in,out,IRQ)。
root@ubuntu:~# cat /sys/kernel/debug/gpio
gpiochip4: GPIOs 423-438, parent: i2c/3-0076, 3-0076, can sleep:
gpio-423 ( |io-ser-reset0 ) out hi
gpio-424 ( |io-ser-reset1 ) out hi
gpio-425 ( |io-ser-reset2 ) out hi
gpio-426 ( |io-ser-reset3 ) out hi
gpiochip3: GPIOs 439-455, parent: platform/360b0000.gpio, 360b0000.gpio:
gpiochip2: GPIOs 456-473, parent: platform/370f5000.gpio, 370f5000.gpio:
gpiochip1: GPIOs 474-479, parent: platform/39500000.gpio, 39500000.gpio:
gpiochip0: GPIOs 480-511, parent: platform/394f0000.gpio, 394f0000.gpio:
gpio-481 ( |sysfs ) out hi ACTIVE LOW
gpio-491 ( |sysfs ) in hi
gpio-495 ( |sysfs ) in hi
gpio-496 ( |sysfs ) in hi
gpio-498 ( |sysfs ) in hi
gpio-503 ( |io-ext-reset ) out lo
root@ubuntu:~#
确定gpio-index
kernel_index = base + offset,base 通过 "/sys/class/gpio" 或者"/sys/kernel/debug/gpio" 获取,offset通过dts获取。
以pin sensor8_err为例:通过查看 drobot-s100-pinctrl.dtsi,可以知道sensor8_err对应的gpio chip是 video_port0: gpio@360b0000,对应的offset是 13。 查看/sys/kernel/debug/gpio,可知"video_port0: gpio@360b0000"对应的base是439 则sensor8_err 对应的gpio kernel index是:439+13 = 452
查看drobot-s100-pinctrl.dtsi,获取offset和base
下面设备树可知sensor8_err对应video_sensor8_err,对应的gpio chip是"video_port0: gpio@360b0000"。 video_gnss_int的offset为0,递增计数,则video_sensor8_err的offset为13。
pinctrl_video: pinctrl@36090000 {
compatible = "drobot,s100-pinctrl";
reg = <0x0 0x36090000 0x0 0x1000>,
<0x0 0x360a0000 0x0 0x1000>;
pctldev-name = "video";
status = "okay";
video_gpio: video_gpio_func {
pinmux {
function = "video_gpio";
pins = "video_gnss_int", "video_peri_rsto",
"video_cam_pint", "video_sd_1v8", "video_sd_bus_pow",
"video_sensor0_err", "video_sensor1_err",
"video_sensor2_err", "video_sensor3_err", "video_sensor4_err",
"video_sensor5_err", "video_sensor6_err",
"video_sensor7_err", "video_sensor8_err",
"video_sensor9_err", "video_sensor10_err", "video_sensor11_err";
};
pinconf {
pins = "video_gnss_int", "video_peri_rsto",
"video_cam_pint", "video_sd_1v8", "video_sd_bus_pow",
"video_sensor0_err", "video_sensor1_err",
"video_sensor2_err", "video_sensor3_err", "video_sensor4_err",
"video_sensor5_err", "video_sensor6_err",
"video_sensor7_err", "video_sensor8_err",
"video_sensor9_err", "video_sensor10_err", "video_sensor11_err";
drive-strength = <1>;
};
};
}
如这行:gpiochip3: GPIOs 439-455, parent: platform/360b0000.gpio, 360b0000.gpio: "GPIOs 439-455"代表base是439
cat /sys/kernel/debug/gpio
root@ubuntu:~# cat /sys/kernel/debug/gpio
gpiochip4: GPIOs 423-438, parent: i2c/3-0076, 3-0076, can sleep:
gpio-423 ( |io-ser-reset0 ) out hi
gpio-424 ( |io-ser-reset1 ) out hi
gpio-425 ( |io-ser-reset2 ) out hi
gpio-426 ( |io-ser-reset3 ) out hi
gpiochip3: GPIOs 439-455, parent: platform/360b0000.gpio, 360b0000.gpio:
gpiochip2: GPIOs 456-473, parent: platform/370f5000.gpio, 370f5000.gpio:
gpio-464 ( |scl ) out lo
gpio-465 ( |sda ) in lo
gpio-466 ( |scl ) out lo
gpio-467 ( |sda ) in lo
gpio-468 ( |scl ) out lo
gpio-469 ( |sda ) in lo
gpio-470 ( |scl ) out lo
gpio-471 ( |sda ) in lo
gpio-472 ( |scl ) out lo
gpio-473 ( |sda ) in lo
gpiochip1: GPIOs 474-479, parent: platform/39500000.gpio, 39500000.gpio:
gpiochip0: GPIOs 480-511, parent: platform/394f0000.gpio, 394f0000.gpio:
gpio-495 ( |scl ) out lo
gpio-496 ( |sda ) in lo
gpio-503 ( |io-ext-reset ) out lo