7.6 RDK S100构建系统开发指南
BSP 源码包下载地址参见: 系统软件(需要注册登录)
商业版提供更完整的功能支持、更深入的硬件能力开放和专属的定制内容。为确保内容合规、安全交付,我们将通过以下方式开放商业版访问权限。
商业版本获取流程:
- 填写问卷:提交您的机构信息、使用场景等基本情况
- 签署保密协议(NDA):我们将根据提交信息与您联系,双方确认后签署保密协议
- 内容释放:完成协议签署后,我们将通过私有渠道为您开放商业版本资料
如您希望获取商业版内容,请点击下方链接填写问卷,我们将在 3 ~ 5 个工作日内与您联系: https://horizonrobotics.feishu.cn/share/base/form/shrcnpBby71Y8LlixYF2N3ENbre
7.6.1 概述
本章节主要针对需要对RDK构建系统进行定制化修改的介绍,rdk_gen的使用说明,请参考rdk_gen仓库的README.md。
基本的使用说明:
# 在线镜像构建,从地瓜及第三方APT源下载依赖的deb包
sudo ./pack_image.sh
# 离线镜像构建,只安装out/product/deb_packages下的deb包,使用此选项时请确保out/product/deb_packages内的deb符合预期,同时out/product/rootfs_packages下已有预编译根文件系统包
sudo ./pack_image.sh -l
# 仅搭建deb包编译环境,不打包镜像
sudo ./pack_images.sh -p
# 构建所有deb包
./mk_debs.sh
# 构建特定deb包,以hobot-configs为例
./mk_debs.sh hobot-configs
7.6.2 根文件系统预编译包构建说明
RDK S100的根文件系统由multistrap+chroot构建生成。
multistrap
官方文档
工具简介
总结而言,multistrap是独立于debbootstrap工具的另一套debian/Ubuntu等以apt源为基础生成根文件系统的工具。它基于一个/多个配置文件定义生成根文件系统所使用的apt源,以及需要默认生成哪些包。
与debootstrap最大的区别有以下几点:
- 灵活性:
multistrap允许用户完全自定义新生成的根文件系统内的所有包,包括apt源内标记为必选的包,但是用户需要自行保证根文件系统的完整性和可用性; - 生成流程:
multistrap不同于debbootstrap,它的生成流程可以概括为以下几个步骤,最大的区别在于第四步,multistrap只进行包的解压缩,没有对包进行配置(也就是执行[pre/post]install脚本): - 读取配置文件
- 根据配置文件从获取指定的apt源的元数据
- 根据配置文件尝试下载指定的包
- 根据配置文件解压缩指定的包
在地瓜提供的
multistrap编译脚本中,我们基于实践经验,通过使用binfmt-support + chroot,在sudo权限下实现了对包的配置,以达到用户制作的根文件系统可以直接烧录上板使用。
配置文件简介
multistrap的配置文件支持单文件/多文件两种形式。多文件情况下可以通过“include”字段将基础版本所包含的所有内容添加上后,只针对特定版本进行配置,极大的方便了多文件系统的维护工作。
以下章节内容的配置文件在S100的代码路径:samplefs/configs:
$ tree samplefs/configs/
samplefs/configs/
├── jammy-base.conf
├── jammy-desktop.conf
├── jammy-server.conf
└── pip-requirements.list
0 directories, 4 files
基本格式介绍
详细的字段介绍请参考官方文档,这里主要针对地瓜的配置文件中的重要配置进行说明。
- 字段:
key1=value1的格式,定义了某个字段“key1”的值为“value1” - 字段集(stanza/section):通过定义“
[Some-Section]”来归集从该行开始,到下一个“[Next-Section]”为止中间所有字段为一个“Section”
重点字段介绍:
- include
- 定义需要include的配置文件的路径
- bootstrap
- 定义生成根文件系统所使用的apt源和要下载并解压缩的包所在的字段集
- aptsources
- 定义生成的根文件系统中路径/etc/sources.list.d/内会保存的apt源所在的字段集。注意,这个源不一定需要与bootstrap中用于生成根文件系统的源保持一致,但我们强烈建议aptsources定义的apt源是bootstrap定义的源的超集。
- source/suite/components/omitdebsrc
- 定义apt源使用的关键字。可以参考apt源格式定义
- source:apt源的根链接,与apt源格式的“uri”字段匹配
- suite:apt源的suite,与apt源格式的“suite”字段匹配,一般代表该源对应的系统code name+属性,例如Ubuntu的jammy/focal/jammy-updates/jammy-security
- components:apt源的component,与apt源格式的“component”字段匹配,同样可以添加多个
- omitdebsrc:拉取apt元数据及包时,是否下载deb包对应的src包,一般配置为“true”,即不下载deb包对应的src包,以加速构建。
- packages
- 用于定义需要拉取的包的字段,一个packages字段可以定义多个包,包之间以空格分隔,多个packages字段的合集会作为最终的包定义。
多文件配置示例
请参考代码路径samplefs/configs/jammy-desktop.conf
RDK S100的实现
配置文件设计
RDK S100上,multistrap的配置文件默认分为3部分:
- jammy-base.conf:用于配置RDK S100通用的默认根文件系统配置,包括使用的apt源,RDK S100所有版本默认包含的包等;
- jammy-desktop.conf:用于配置RDK S100桌面版根文件系统基于jammy-base.conf新增的包;
- jammy-server.conf:用于配置RDK S100服务器版根文件系统基于jammy-base.conf新增的包;
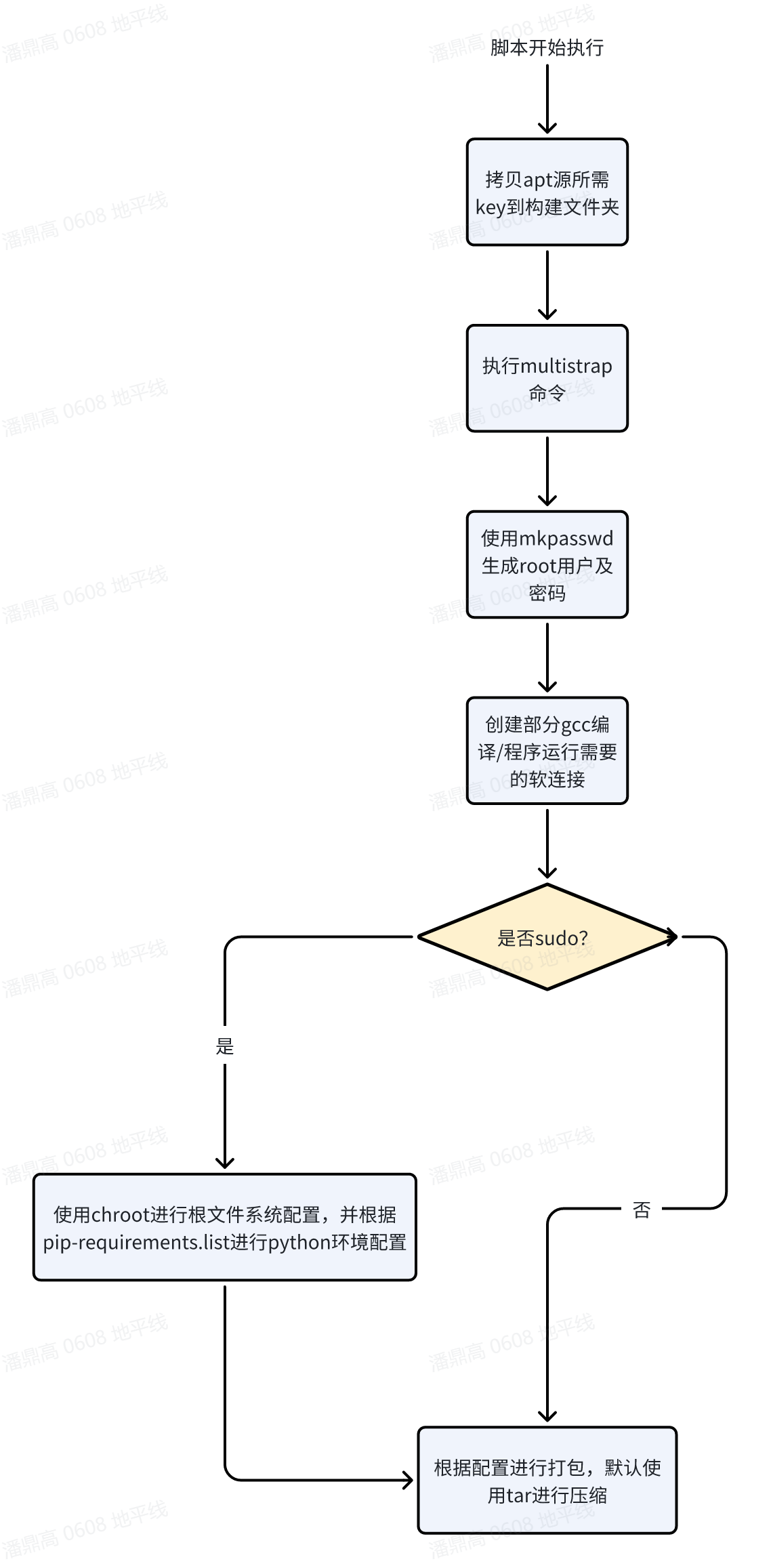
构建流程说明
用户一般使用samplefs/make_ubuntu_samplefs.sh脚本来进行根文件系统的构建,如果使用sudo调用该脚本,则根文件系统构建过程会包括对包的配置,耗时会显著增加。
如�果不使用sudo调用该脚本,则构建过程不会包括对包的配置,耗时会相对减少,但是首次启动需要在板端使用命令rm -rf /var/lock/* ; dpkg --configure -a --force-confdef --force-confold ; systemctl enable /etc/systemd/system/S*.service命令来初始化系统并重启以确保系统正常工作。
推荐使用sudo调用samplefs/make_ubuntu_samplefs.sh。
调用samplefs/make_ubuntu_samplefs.sh脚本需要在samplefs目录下进行。
在不添加参数的情况下直接在使用sudo ./make_ubuntu_samplefs.sh,脚本默认构建桌面版镜像,也就是使用jammy-desktop.conf文件来构建根文件系统。
指定使用的配置文件的命令:sudo ./make_ubuntu_samplefs.sh build <config_file_name>,例如新增的配置文件为:new-desktop.conf,则命令就是:sudo ./make_ubuntu_samplefs.sh build new-desktop.conf,new-desktop.conf文件需要放到samplefs/configs文件夹内。
脚本构建流程图如下:
裁剪/自定义根文件系统的方法
apt源(deb包的control信息)中的Priority字段会区分裁剪/自定义的流程。 multistrap默认会将所有Priority为“Required”的包进行安装。 地瓜定义important包也会被安装。
仅裁剪/自定义apt优先级不为“important”/“required”的包
用户直接在samplefs/configs/jammy-base.conf等配置文件的各个“packages”字段中删除自己不需要的包,或者定义一个新的字段集,并在“[General]”字段集的“boostrap”字段中去掉原有字段集并添加自己的字段集即可。
需要裁剪/自定义apt优先级为“important”/“required”的包
注意:一般来说各个apt源的维护者会将他们认为该系统(Ubuntu/Debian的各个版本)的最小集的包的优先级标为“Required”,但是是可以进一步裁剪的。进行这种程度的根文件系统裁剪时,用户需要自己保证根文件系统的完整性和可用性。
步骤如下:
- 在
[Gerneral]字段集中添加omitrequired=true; - 在
Packages中对所有需要添加的包进行定义。
7.6.3 RDK S100 deb包构建流程说明
简介
RDK S100默认以deb包的形式来管理用户层的地瓜定制功能。在SDK的source/目录下保存了所有地瓜定制功能的deb包构建的源码。
构建脚本介绍
构建deb的入口脚本为mk_debs.sh,该脚本位于SDK包的根目录。用户可以通过该脚本构建仓库内的deb包。
deb包源码目录
source下的目录,除bootloader,kernel,hobot-drivers外均为地瓜定制化功能的deb包的��构建源码。其中hobot-spdev,hobot-camera,hobot-io等目录内包含了相应动态库的源码,通过mk_debs.sh脚本构建这两个包时,对应的源码会被编译。
deb包源码目录的基本结构(以hobot-configs为例)内会包括:
hobot-configs/
├── LICENSE # deb包源码的License信息
├── README.md # deb包的简单说明
├── VERSION # deb包的版本号,以major.minor.patch的形式保存,编译时默认添加时间戳
└── debian # deb包的根目录,相当于板端安装时的根目录
├── DEBIAN # deb包的元数据信息
| ├── postinst # deb包标准脚本之一,在dpkg安装的拷贝步骤后执行
│ ├── postrm # deb包标准脚本之一,在dpkg删除的文件删除步骤后执行
│ ├── preinst # deb��包标准脚本之一,在dpkg安装的拷贝步骤前执行
│ └── prerm # deb包标准脚本之一,在dpkg删除的文件删除步骤前执行
├── etc # 具体需要拷贝到根文件系统的文件,根据实际情况创建即可。相对“debian”的目录,就是相对根文件系统的目录,例如这个目录就会被安装到板端/etc目录下
├── lib # 具体需要拷贝到根文件系统的文件,根据实际情况创建即可。
└── usr # 具体需要拷贝到根文件系统的文件,根据实际情况创建即可。
包含源码的deb包目录,则会在debian目录之外,新增源码目录,如hobot-camera:
hobot-camera/
├── LICENSE
├── README.md
├── VERSION
├── debian
│ ├── DEBIAN
│ ├── etc
│ └── usr
├── drivers # 需要编译的源码目录
│ ├── Makefile # 源码编译的入口Makefile
│ ├── deserial # 源码子目录
│ ├── inc
│ └── sensor
├── lib -> ../hobot-multimedia/debian/usr/hobot/lib # 方便编译的源码软连接
├── sensor_calibration # Sensor tuning库,下列库仅为示例,以实际情况为准
│ └── lib_imx219_linear.so
└── tuning_tool # 地瓜提供的Sensor tuning工具
├── bin
├── cfg
├── control_tool
├── res
└── scripts
构建流程说明
详细流程请参考mk_debs.sh脚本实现,以下是一个简略的流程图:
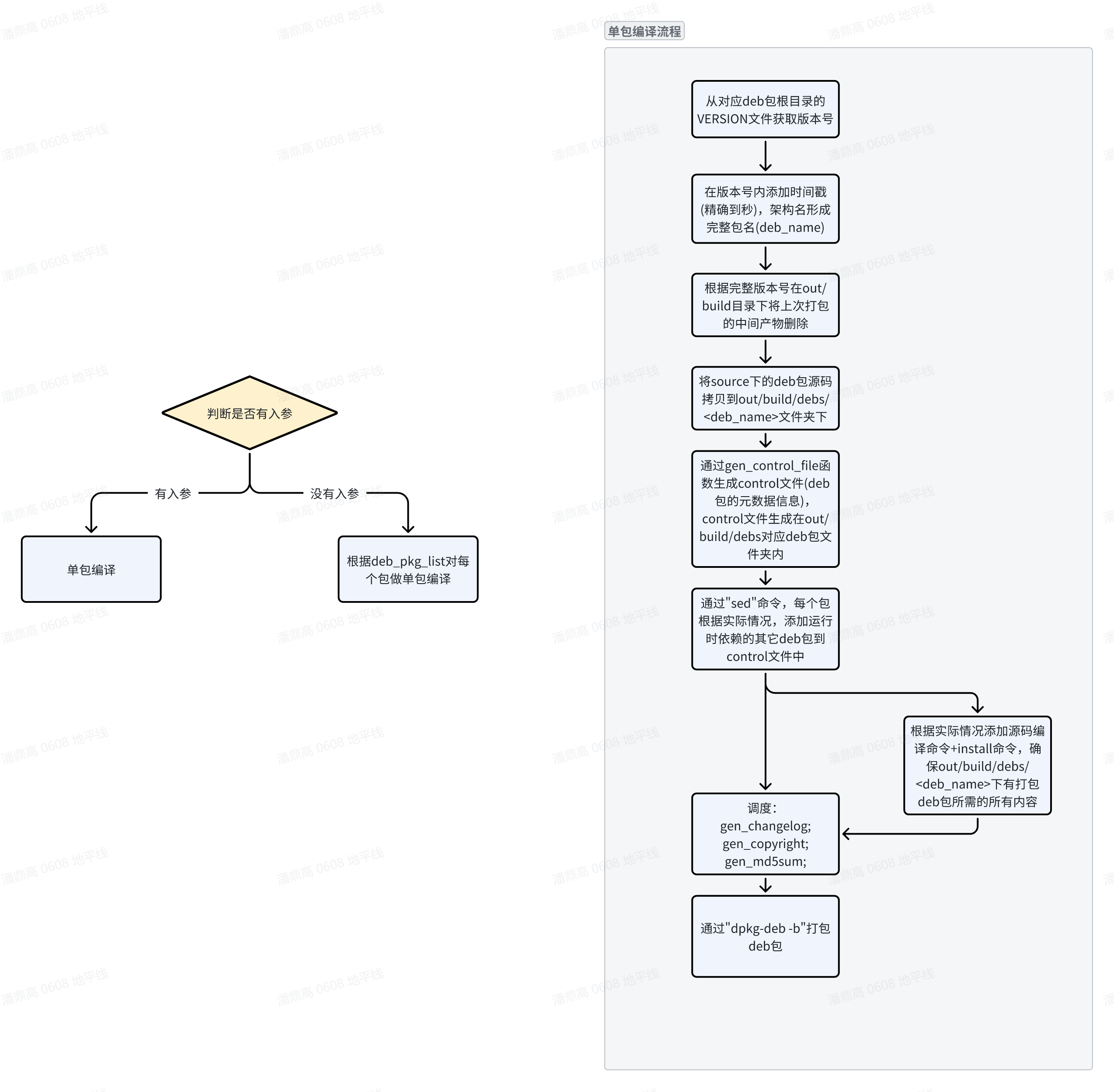
自定义deb包流程说明
- 在
source/文件夹下,新建对应包的包名(dpkg内的package name)命名的文件夹,这里以"new_package"为例; - 在
source/new_package文件夹下,新建debian文件夹,里面创建4个脚本文件,这4个脚本文件可以为空:- preinst:安装new_package包拷贝前需要执行的脚本;
- postinst:安装new_package包拷贝执行完成后需要执行的脚本;
- prerm:移除new_package包执行删除命令前需要执行的脚本;
- postrm:移除new_package包执行删除命令后需要执行的脚本。
- 如果需要在
mk_debs.sh不带入参时自动对该包进行编译,则在mk_debs.sh脚本的deb_pkg_list变量内添加new_package字段; - 在
mk_debs.sh脚本的make_debian_deb函数的switch内添加new_package的case:- 在
case内调度gen_control_file函数,生成构建deb包所需要的control文件; - 在
case内调度sed命令,将默认的“depends”字段替换为真正的deb依赖。假设new_package的依赖为dep_pkg1和dep_pkg2;- 如果有依赖,则使用
sed -i 's/Depends: .*$/Depends: dep_pkg1,dep_pkg2/' "${deb_dst_dir}"/DEBIAN/control; - 如果没有依赖,则使用
sed -i 's/Depends: .*$/Depends: /' "${deb_dst_dir}"/DEBIAN/control;
- 如果有依赖,则使用
- (可选)如果该deb在打包前,需要进行源码编译,则进行源码编译命令的调度,请注意最终的所有输出,均需要输出到
out/build/debs/new_pkg/debian/目录下; - 置位
is_allowed=1
- 在
7.6.4 deb包编入镜像流程说明
在镜像构建的过程中,deb包会被编入板端根文件系统内。
在线镜像构建
流程说明
当pack_image.sh不添加-l选项进行调度时,会进入在线镜像构建流程。流程介绍如下:
- 从
pack_image.sh的DEFAULT_CONFIG字段获取当前的默认编译配置文件,以build_params/ubuntu-22.04_desktop_rdk-s100_release.conf为例;- 该配置文件可以通过-c选项指定
- 从
build_params/ubuntu-22.04_desktop_rdk-s100_release.conf内获取RDK_DPKG_DEB_PKG_LIST字段; - chroot到
out/deploy/rootfs目录下:- 根据
RDK_DPKG_DEB_PKG_LIST字段从现有板端apt源内尝试下载所有deb包; - 安装所有deb包;
- 根据
添加额外deb包的方法
- 找到需要安装的包名;
- 在指定的编译配置文件内的
RDK_DPKG_DEB_PKG_LIST变量内添加对应的包名。
获取报名的方法请参考获取所需deb包名的方法
离线镜像构建
流程说明
当pack_image.sh添加-l选项进行调度时,会进入离线镜像构建��流程。流程介绍如下:
- chroot:
- 根据
out/product/deb_packages内现有的deb包,对每个deb包进行安装;
- 根据
添加额外deb包的方法
- 找到需要安装的包名;
- 执行以下命令将对应包下载到
out/product/deb_packages
cd out/product/deb_packages
apt download <package names>
获取报名的方法请参考获取所需deb包名的方法
获取所需deb包名的方法
包名可以通过两个方式获取:
- 仅知道需要的文件且host没有安装过该包:
- 建议通过Google/Baidu等搜索引擎确认该文件所属的deb包名,并确认该deb包所属的apt源,参考流程如下:
- 在debian.org上通过文件名确认deb包名,注意需要在"Search the contents of packages"一节进行搜索;
- 确认包名后,在Ubuntu Launchpad上搜索具体的包归属的源,确认jammy/jammy-updates的main/universe/multiverse等components中有该包;
- 建议通过Google/Baidu等搜索引擎确认该文件所属的deb包名,并确认该deb包所属的apt源,参考流程如下:
- 知道需要的文件,且host端有安装过:
- 可以通过
dpkg -S <filename>命令获取包名。
- 可以通过
7.6.5 自定义分区说明
RDK S100的分区定义文件保存在source/bootloader/device/rdk/s100/partition_config_files文件夹下,默认使用的分区表为:source/bootloader/device/rdk/s100/partition_config_files/s100-gpt.json
{
"global": {
"antirollbackUpdate_host": true,
"antirollbackUpdate_hsm": false,
"ab_sync": false,
"backup_dir": "/tmp/ota/backup",
"AB_part_a": "_a",
"AB_part_b": "_b",
"BAK_part_bak": "_bak"
},
"fpt": "fpt_common", //------------------//
"recovery": "recovery_common", // //
"misc": "misc_common", // //
"HB_APDP":"HB_APDP_common", // //
"keystorage": "keystorage_common", // //
"HSM_FW": "HSM_FW_common", // miniboot_flash //
"HSM_RCA": "HSM_RCA_common", // //
"keyimage": "keyimage_common", // //
"SBL": "SBL_common", // //
"scp": "scp_common", // //
"spl": "spl_common", // //
"MCU": "MCU_common", //------------------//
"quickboot": "quickboot_common", //------------------// //------------------//
"veeprom": "veeprom_common", // // // //
"ubootenv": "ubootenv_common", // // // //
"acore_cfg": "acore_cfg_common", // miniboot_emmc // // //
"bl31": "bl31_common", // // // //
"optee": "optee_common", // // // //
"uboot": "uboot_common", //------------------// // emmc_disk //
"boot": "boot_common", // //
"ota": "ota_common", // //
"log": "log_common", // //
"userdata": "userdata_common", // //
"system": "system_common" //------------------//
}
默认镜像及分区介绍
- miniboot_flash:保存在S100 Nor Flash上的基础启动镜像,包括HSM/MCU0等系统组件的镜像;
- miniboot_emmc:保存在S100 eMMC上的基础启动镜像,包括BL31/Uboot等系统组件的镜像;
- emmc_disk:S100 eMMC上的完整镜像,会包含miniboot_emmc,编译时会自动转换为安卓Sparse镜像(安卓Sparse镜像说明(第三方网站,仅供参考))以减小系统储存空间占用;
配置文件说明
整体分区表的配置分为全局共享配置和分区单独配置,其中全局共享配置放在“global”字段中,这是对所有分区都有效的配置。 支持的全局参数:
antirollbackUpdate_host:是否更新host的anti-rollback版本,true或false;antirollbackUpdate_hsm:是否更新hsm的anti-rollback版本,true或false;ab_sync:地瓜内部reserved字段;backup_dir:hsm备份目录;AB_part_a:AB分区的A分区后缀;AB_part_b:AB分区的B分区后缀;BAK_part_bak:备份分区后缀;
分区单独配置使用“分区名”:“分区配置类型”的形式,可以根据需要选择不同的分区配置类型。 例如:boot分区就需要首先在分区全局配置中添加boot分区的描述,然后在source/bootloader/device/rdk/s100/partition_config_files/sub_config文件夹中创建boot.json,并在其中定义boot_common:
{
"boot_common": {
"components":[
"${TARGET_DEPLOY_DIR}/rootfs/boot/:60m"
],
"pre_cmd": [
"pack_boot.sh;[ $? -ne 0 ] && exit 1;rm -rf ${TARGET_DEPLOY_DIR}/rootfs/boot/System.map*"
],
"post_cmd": [
"pack_avb_img.sh boot boot"
],
"fs_type": "ext4",
"medium": "emmc",
"ota_is_update": false,
"ota_update_mode": "image",
"part_type": "AB",
"part_type_guid": "C12A7328-F81F-11D2-BA4B-00A0C93EC93B",
"size": "60m"
},
"boot_ota": {
"components":[
"${TARGET_DEPLOY_DIR}/rootfs/boot/:60m"
],
"pre_cmd": [
"pack_boot.sh;[ $? -ne 0 ] && exit 1;rm -rf ${TARGET_DEPLOY_DIR}/rootfs/boot/System.map*"
],
"post_cmd": [
"pack_avb_img.sh boot boot"
],
"fs_type": "ext4",
"medium": "emmc",
"ota_is_update": true,
"ota_update_mode": "image",
"part_type": "AB",
"part_type_guid": "C12A7328-F81F-11D2-BA4B-00A0C93EC93B",
"size": "60m"
}
}
支持的分区参数:
depends:表示分区依赖关系,当前分区的制作需要依赖哪些分区制作完成,列表的形式,在其中添加依赖的分区名;components:表示当前分区需要包含哪些内容,可以是子镜像路径或文件目录,文件目录会做成文件系统,当前支持的文件系统有ext4和fat16,在路径后使用“:”表示当前这一部分在分区中所占的大小。子镜像可以为多个,子镜像建议放在 out/xxx/deploy 下的对应分区的目录中;components_nose:非安全启动镜像组件;pre_cmd:在根据component内容制作镜像以前需要执行的命令;post_cmd:在根据component内容制作完镜像之后需要执行的命令;fs_type:镜像类型,None/ext4/fat16/misc;medium:镜像位于emmc/nor;ota_is_update:全量ota包是否包含;ota_update_mode:分区的OTA升级方式;image为镜像升级,默认值,image_diff为镜像差分;is_rootfs:是否是rootfs分区;part_type:分区类型,当前支持AB,BAK,PERMANENT;size:表示分区的大小,单位可以是k, m, g;magic:表示分区的magic,只针对添加flash镜像头的分区镜像有效;have_anti_ver:当前分区镜像中是否包含antirollback版本,true或false;load_addr:表示镜像的加载地址,只针对添加flash镜像头的分区镜像有效;entry_addr:表示镜像的入口地址��,只针对添加flash镜像头的分区镜像有效;nose_support:非安全启动镜像支持;
- JSON文件中的分区顺序即为板端实际分区顺序;
- 分区大小需要根据该分区所属储存介质的扇区大小做对齐;
分区修改说明
S100X支持变更eMMC/UFS上的分区,只需添加或删除或修改分区配置对应的分区字段。对于flash分区,如有变更需求,请联系地瓜。
- 分区表中,
log及其以前的分区为启动分区,原则上不建议修改。 - 其他分区,如
userdata,system等,可以自由调整大小,如果新增分区,注意调整fstab文件以确保分区被正常挂载;
分区表修改后,需要经过以下步骤生效:
- 构建hobot-miniboot deb包:
# In RDK Source Root Directory
./mk_debs.sh hobot-miniboot - 本地构建镜像:
# In RDK Source Root Directory
sudo ./pack_image.sh -l