7.7 VDSP开发指南
基础调试指南
CPU侧开发
镜像加载卸载
S100系统在启动时默认不启动VDSP FW(Firmware),需要用户通过命令的形式手动加载和卸载FW,命令如下所示:
echo -n <firmware路径> > /sys/module/firmware_class/parameters/path
#S100 VDSP0
# 设置VDSP0 FW名称:
echo <firmware名称> > /sys/class/remoteproc/remoteproc_vdsp0/firmware
#VDSP0的FW加载:
echo start > /sys/class/remoteproc/remoteproc_vdsp0/state
#VDSP0的FW卸载:
echo stop > /sys/class/remoteproc/remoteproc_vdsp0/state
用户可通过以下命令修改FW路径(必须是绝对路径):
echo -n <firmware路径> > /sys/module/firmware_class/parameters/path
用户可根据自己命名的FW名称在加载之前进行调整:
#S100 VDSP0
echo <firmware名称> > /sys/class/remoteproc/remoteproc_vdsp0/firmware
用户需要修改原始镜像,配置init.rc,kernel启动后由init进程自动加载VDSP镜像。
#首先将编译出的FW镜像(如vdsp0)拷贝到/userdata 下
echo -n <firmware路径> > /sys/module/firmware_class/parameters/path
#S100 VDSP0
echo <firmware名称> > /sys/class/remoteproc/remoteproc_vdsp0/firmware
echo start > /sys/class/remoteproc/remoteproc_vdsp0/state
FW版本查看
#S100 VDSP0
cat /sys/class/remoteproc/remoteproc_vdsp0/version # for vdsp0
VDSP运行状态查看
#running表示已加载,offline表示未加载
#S100 VDSP0
cat /sys/class/remoteproc/remoteproc_vdsp0/state # for vdsp0
心跳监控
默认处于关闭状态,可通过下列命令打开或关闭;心跳监控、发送周期为100ms,监控到连续7次心跳被丢失就会上报诊断并reset VDSP。
# 打开心跳监控
echo Y > /sys/module/hobot_remoteproc/parameters/heartbeat_enable
# 关闭心跳监控
echo N > /sys/module/hobot_remoteproc/parameters/heartbeat_enable
通过函数接口形式操作vdsp
通过libvdsp.so动态链接库加载DSP程序,实现加载、启动、停止、复位、获取DSP状态等功能,API介绍可参考 VDSP启停控制接口。
消息连接和发送
目前用户只可使用系统预设的服务名称,可使用的服务名如下表所示:
| VDSP | 服务名称 | 作用 | 是否必须启动 | VDSP侧是否默认启动 |
|---|---|---|---|---|
| DSP0/1 | dcore0_device_op/dcore1_device_op | 系统软件内部对DSP的调试控制,系统软件已经使用,用户不可再次注册和使用 | 是 | 是 |
| DSP0/1 | dcore0_acore_heart/dcore1_acore_heart | 心跳机制使用,目前未使用,用户可用作其他用途 | 否 | 否 |
| DSP0/1 | dcore0_rpmsg_bpu/dcore1_rpmsg_bpu | BPU相关的控制,目前未使用,用户可用作其他用途 | 否 | 否 |
| DSP0/1 | dcore0_rpmsg_op/dcore1_rpmsg_op | 工具链算子相关的控制,目前未使用,用户可用作其他用途 | 否 | 否 |
| VDSP | 服务名称 | 作用 | 是否必须启动 | VDSP侧是否默认启动 |
|---|---|---|---|---|
| DSP0 | dcore0_device_op | 系统软件内部对DSP的调试控制,系统软件�已经使用,用户不可再次注册和使用 | 是 | 是 |
| DSP0 | dcore0_acore_heart | 心跳机制使用,目前未使用,用户可用作其他用途 | 否 | 否 |
| DSP0 | dcore0_rpmsg_bpu | BPU相关的控制,目前未使用,用户可用作其他用途 | 否 | 否 |
| DSP0 | dcore0_rpmsg_op | 工具链算子相关的控制,目前未使用,用户可用作其他用途 | 否 | 否 |
用户可使用的API可参考下表:
| 接口 | 功能 | 头文件 | 相关库 |
|---|---|---|---|
| hb_rpmsg_connect_server | 连接服务 | rpmsg_lib.h | librpmsg.so |
| hb_rpmsg_disconnect_server | 断开服务 | rpmsg_lib.h | librpmsg.so |
| hb_rpmsg_send | 发送消息 | rpmsg_lib.h | librpmsg.so |
| hb_rpmsg_recv | 接收消息 | rpmsg_lib.h | librpmsg.so |
其中,同一个服务通道,不支持多进程、多线程并发接收或发送。
heap相关开发
VDSP提供了动态分配释放heap接口,支持配置自定义内存对齐大小,以及支持查看当前heap状态,当VDSP端需要动态分配heap时,可以通过以下接口实现。
| 接口 | 功能 | 相关头文件 |
|---|---|---|
| hb_mem_heap_initialize | 初始化mem alloctor接口 | hb_mem_allocator.h |
| hb_mem_heap_deinitialize | 解初始化mem alloctor接口 | hb_mem_allocator.h |
| hb_mem_heap_alloc | 分配heap空间 | hb_mem_allocator.h |
| hb_mem_heap_free | 释放已分配的heap空间 | hb_mem_allocator.h |
| hb_mem_heap_get_status | 获取当前heap状态 | hb_mem_allocator.h |
VDSP侧开发
代码获取步骤如下:
(1)首先获取到发布包,解压后确认有vdsp源码。如果无,联系地瓜相关人员进行获取。
(2)在vdsp路径下可以获取到vdsp源码。
Linux环境搭建
获取build包建立编译环境。其中build包的获取请联系地瓜相关人员进行获取。
本文档仅提供Linux环境搭建及编译的说明介绍。对于文档中提到的xplorer中获取调试文档请联系地瓜相关人员进行获取。
Linux环境下安装build的命令:
tar -zxvf Vision_Q8_linux.tgz \
&& mv RI-2023.11-linux/Vision_Q8/ /opt/xtensa/XtDevTools/install/builds/RI-2023.11-linux/ \
&& rm -rf RI-2023.11-linux
/opt/xtensa/XtDevTools/install/builds/RI-2023.11-linux/Vision_Q8/install --xtensa-tools \
/opt/xtensa/XtDevTools/install/tools/RI-2023.11-linux/XtensaTools/
编译
获取代码后编译步骤如下:
(1)cd vdsp_fw
(2)bash make.sh
静态库生成在library目录
library/libvdsp0.a
二进制镜像生成在samples目录
samples/{subdir}/vdsp0
调试指南
日志查看
VDSP FW的日志会通过串口输出。
需要注意的是VDSP FW与其他模块共用一个串口,如BL31、optee,若VDSP FW输出日��志太多,可能会阻塞这些模块的日志输出,引起watchdog。 另外VDSP FW日志和kernel日志都输出到串口中,存在相互干扰的问题,用户可通过降低kernel日志等级来防止日志干扰:
echo 0 > /proc/sys/kernel/printk
当没有串口可用的情况下,用户可通过ssh登录板子,后台默认会启动hrut_remoteproc_log服务:
#S100 VDSP0 默认开机执行的启动命令,日志保存路径:/log/dsp0/message
hrut_remoteproc_log -b /sys/class/remoteproc/remoteproc_vdsp0/log -f /log/dsp0/message -r 2048 -n 200
同样的,VDSP FW的日志会写入Share memory中,由CPU侧log服务进程存入文件系统中。因此用户可通过以下路径下的文件查看日志,但是需要注意的是这里的日志并不是实时的。
#S100 VDSP0的日志路径:
/log/dsp0/message
/log/dsp0/archive/
#message是临时文件,存满之后会写入到archive/目录下,当该目录下的文件达到一定数量后,会删除时间较早产生的文件
日志打印接口
使用printf接口日志会通过串口输出。
推荐使用DSP_ERR、DSP_WARN、DSP_INFO、DSP_DBG接口,该接口除了将日志通过串口输出,还会将日志写入Share memory中,通过CPU侧的log服务将日志信息存入文件系统中。
DSP_*接口使用注意事项:
- 头文件
hb_vdsp_log.h - 接口使用示例。比如进入异常分支需要打印日志时,使用DSP_ERR接口,
DSP_ERR("Input parameter invalid.\n");
线程状态查看
通过以下命令可在串口中查看VDSP侧的线程状态。需要注意的是以下数据的统计和输出可能会影响VDSP的性能。
使用方法:首先需要代码中使能#define THREAD_STACK_CHECK (1),其次需要在新启动的线程前使能栈跟踪,如下所示:
(void)hb_enable_stack_track(dev_thread_stack, sizeof(dev_thread_stack)/sizeof(dev_thread_stack[0]));
#S100 VDSP0:
echo on > /sys/devices/virtual/misc/vdsp0/vdsp_ctrl/dspthread
echo off > /sys/devices/virtual/misc/vdsp0/vdsp_ctrl/dspthread
coredump查看
和coredump相关的系统软件初始化主要有两部分:注册异常和使能看门狗。
hb_wdt_on();
hb_enable_coredump();
目前xos能够处理的异常类型如下:
/* EXCCAUSE register values: */
/* General Exception causes (Bits 3:0 of EXCCAUSE register) */
/* No exception */
#define EXCCAUSE_NONE UINT32_C(0)
/* Instruction usage */
#define EXCCAUSE_INSTRUCTION UINT32_C(1)
/* Addressing usage */
#define EXCCAUSE_ADDRESS UINT32_C(2)
/* External causes */
#define EXCCAUSE_EXTERNAL UINT32_C(3)
/* Debug exception */
#define EXCCAUSE_DEBUG UINT32_C(4)
/* Syscall exception */
#define EXCCAUSE_SYSCALL UINT32_C(5)
/* Hardware failure */
#define EXCCAUSE_HARDWARE UINT32_C(6)
/* Memory management */
#define EXCCAUSE_MEMORY UINT32_C(7)
/* Coprocessor */
#define EXCCAUSE_CP_DISABLED UINT32_C(8)
/* Reserved 9-15 */
不应在 VQ8 上为异常原因 4(调试异常)/5(SYSCALL 异常)/8(协处理器异常)注册异常处理程序,为系统预留使用。 需要注意的是:9-15 为预留类型,也需要略过不注册。
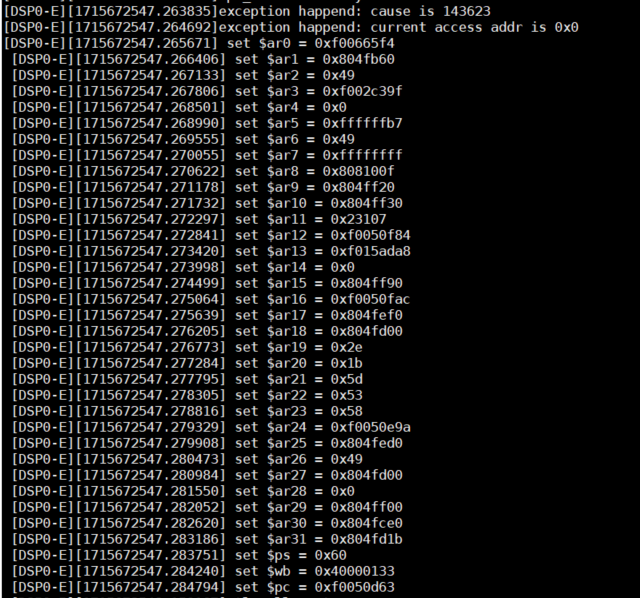
离线调试方法如下: VDSP发生coredump时,Acore会把VDSP所有可能使用的memory空间(iram/dram0/dram1/reserved ddr)全部写入指定的文件系统中,路径如下:
#vdsp0
/log/coredump/
新建restore.script.sh脚本,4个memory dump文件的路径根据实际项目的存放路径设�置,把获得到的CPU寄存器复制到该脚本对应处,如下所示:
python import thread_aware_rtos
python thread_aware_rtos.k.rtos_support.dump_analysis_mode = True
b main
run
restore vdsp0_ddr_2024-05-06-02-50-03.hex binary 0xf0000000
restore vdsp0_iram_2024-05-06-02-50-03.hex binary 0x08080000
restore vdsp0_dram0_2024-05-06-02-50-03.hex binary 0x08000000
restore vdsp0_dram1_2024-05-06-02-50-03.hex binary 0x08040000
set $ar0 = 0xf00502a8
set $ar1 = 0xf3fdded0
set $ar2 = 0xf3fddd00
set $ar3 = 0x34
set $ar4 = 0x1b
set $ar5 = 0x5d
set $ar6 = 0x53
set $ar7 = 0x58
set $ar8 = 0xf0050192
set $ar9 = 0xf3fddeb0
set $ar10 = 0x4f
set $ar11 = 0xf3fddd00
set $ar12 = 0x0
set $ar13 = 0xf3fddee0
set $ar14 = 0xf3fddce0
set $ar15 = 0xf3fddd1b
set $ar16 = 0xf0065978
set $ar17 = 0xf3fddb60
set $ar18 = 0x4f
set $ar19 = 0xf002bea4
set $ar20 = 0x0
set $ar21 = 0xffffffb1
set $ar22 = 0x4f
set $ar23 = 0xffffffff
set $ar24 = 0x808100f
set $ar25 = 0xf3fddf00
set $ar26 = 0xf3fddf10
set $ar27 = 0x53113
set $ar28 = 0xf0050280
set $ar29 = 0xffffffff
set $ar30 = 0x0
set $ar31 = 0xf3fddf70
set $ps = 0x68
set $wb = 0x40000311
set $pc = 0xf0050057
python thread_aware_rtos.k.rtos_support.XOS_initialized = True
打开xt-gdb命令行(xplorer或者命令行模式均可),按照顺序执行如下操作:
xt-gdb vdsp0 (可执行文件的目标文件)
(xt-gdb) >> source restore.script.sh
(xt-gdb) >> run
ctrl+c //取消运行
(xt-gdb) >> stepi
(xt-gdb) >> info threads
(xt-gdb) >> bt
backtrace调试信息显示如下:
(xt-gdb) bt
#0 _RMCDump () at /vdsp/bsp_project/coredump/RegDump.S:90
#1 0xf0050192 in Exc_Dump_Regs () at bsp_project/coredump/Exc_Dump_Regs.c:110
#2 0xf00502a8 in dafault_exchandler (frame=0xf3fddf10) at bsp_project/coredump/coredump.c:125
#3 0x0808100f in _GeneralException (cause=..., exccause=...) at ./xos_vectors_xea3_v2.S
#4 0xf00504b8 in hb_platform_init () at bsp_project/driver/devcontrol/devcontrol.c:152
#5 0xf0030306 in main (argc=1, argv=0xf0073704) at main.c:68
Stack usage查看
Stack usage的说明建议阅读Xtensa® XOS Reference Manual Reference Manual:<VDSP安装路径>/xtensa/XtDevTools/downloads/<version>/docs/xos_rm.pdf。
MPU配置
目前部署的MPU主要两个作用,一是用来限制VDSP访问地址的范围,访问超过MPU允许的范围会报coredump错误,第二个作用是可以配置地址段的属性,详细介绍请参考Xtensa® System Software Reference Manual:<VDSP安装路径>/xtensa/XtDevTools/downloads/<version>/docs/xos_rm.pdf。
VDSP地址映射以及MPU保护部分如下图所示,访问MPU保护地址范围外会报coredump错误。
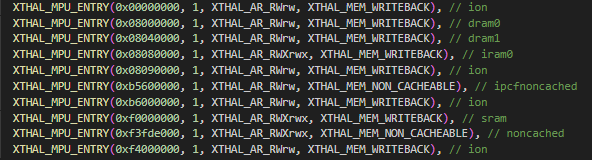
报错log如下图所示,错误地址为0x0,表示访问了不允许访问的地址:
目前对于VDSP地址的属性配置,主要包括三个部分:
(1)对于ION空间的属性配置: XTHAL_MEM_WRITEBACK
(2)对于两个共享内存区域的属性配置:XTHAL_MEM_NON_CACHEABLE
(3)对于除(1)(2)外其他段的属性配置:XTHAL_MEM_WRITEBACK
Cadence文档路径位置
安装Xplorer后,可通过如下位置<VDSP安装路径>/xtensa/XtDevTools/downloads/RI-2023.11/docs查看已下载的文档路径。
FAQ
VDSP侧耗时统计方式有哪些?
用户可使用gettimeofday()直接获取时间,也可通过XT_RSR_CCOUNT()获取count个数来换算时间,前者需要包含#include <sys/time.h>头文件。建议使用后者来统计时间,更精确,且不建议在耗时要求较高的场景下打印日志。
此外用户还可参考Xtensa® Software Development Toolkit User's Guide:<VDSP安装路径>/xtensa/XtDevTools/downloads/<version>/docs/sw_dev_toolkit_ug.pdf。
LSP如何修改?
(1)拷贝一份模板lsp
(2)编辑memmap.xmm
(3)重新生成memmap,执行命令:xt-genldscripts -b custom_lsp/q8-min-rt/
调试使用xos工具时,提示找不到工具链,先确认xos build环境是否建立。
如果建立,配置环境变量,比如配置临时环境变量export PATH=$PATH:[*]/XtensaTools/bin
CPU侧start加载和stop卸载FW时提示不成功?
可能是stop时服务根本没启动,或者start时服务已启动。
VDSP侧如何增加用户线程?
示例代码如下:
ret = xos_thread_create(&dev_thread_tcb, 0, dev_thread_func, 0, "dev_control", dev_thread_stack, STACK_SIZE_1, TRACE_THREAD_PRIO, 0, 0);
其中dev_thread_func表示创建的线程函数,用来实现用户想要在线程函数中处理的功能。dev_thread_stack表示指向线程栈的首地��址(由用户分配)。STACK_SIZE_1表示栈的大小。TRACE_THREAD_PRIO表示线程优先级,取值范围在0~15,数值越小优先级越高。
VDSP侧如何获取设备id?
可以使用xthal_get_prid()。
VDSP侧idma使用哪个库?
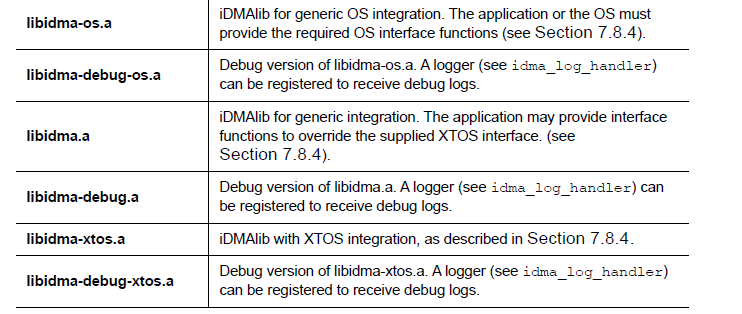
请使用libidma-os或者libidma-debug-os,因为我们使用xos。
int64_t/uint64_t/float类型的变量打印出错?
如果int64_t/uint64_t/float定义的变量在打印时输出异常的值,而在使用时(如进行大小比较等操作)是正常的。
这是因为xtensa/xtutil.h头文件会将printf、vsnprintf等函数替换为xt_printf,xt_vsnprintf,用户需要将xtutil.h头文件注释掉,使用原生的printf、vsnprintf接口。
标准C库的printf等函数,无法在中断handler中使用,否则会卡死。
VDSP在运行过程中出现卡住问题
需要排查变量指针的地址是否是对齐:
(1)(int64_t *)类型的变量指针的地址需要八字节对齐
(2)(int32_t *)类型的变量指针的地址需要四字节对齐
(3)(int16_t *)类型的变量指针的地址需要二字节对齐
确认在中断handler是否使用了标准C库的printf等函数,目前中断handler不支持使用。
使用sim软仿时出现seg段溢出问题
需要更改sim的xmm文件,路径:xtensa/xtensa/XtDevTools/install/builds/RI-2023.11-win32/Vision_Q8/xtensa-elf/lib/sim/memmap.xmm, 将相应的溢出段的值改大,在xplorer下打开cmd:
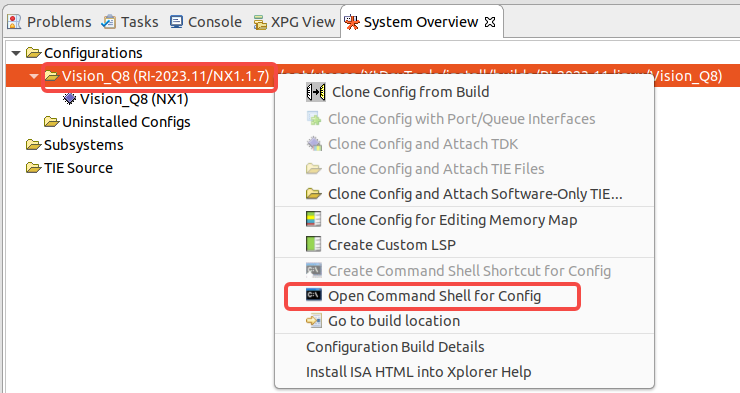
进到xtensa-elf/lib路径下:
执行xt-genldscripts -b sim,如下提示表明成功:

再次编译vdsp工程,进行sim软仿。
Idma搬运过程中出现异常停止问题
出现此情况可以查看idma init函数中,是否有设置运行时间,置0可以关闭时间限制:

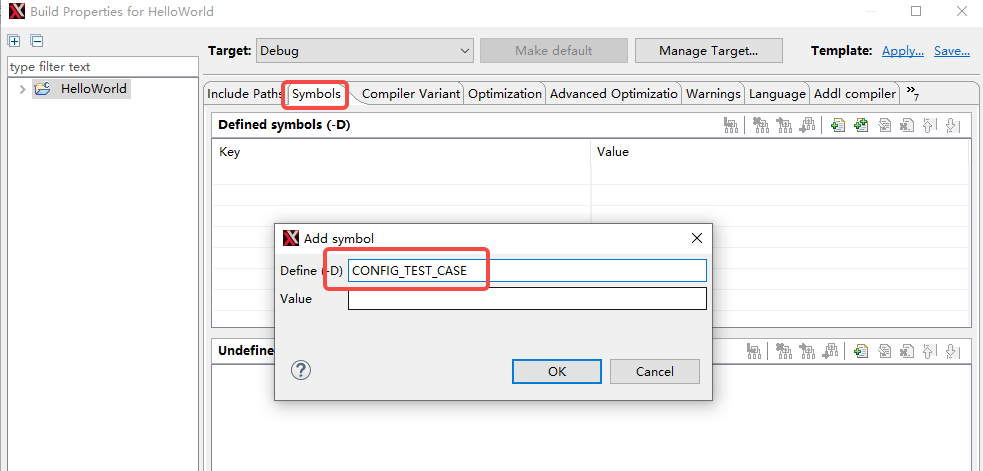
在windows环境编译出的镜像提示dcore0_rpmsg_op server not start
需要手动在Build Properties中添加CONFIG_TEST_CASE:
在总线程个数大于32的运行环境下,线程状态查看功能不生效
这是由于线程dump功能实现时,默认定义存放线程信息的数组大小为32; 可以通过加大数组大小来支持大于32个线程状态查看。
如下所示将支持最多64线程状态查看功能:
static int32_t cycle_check(void * arg, int32_t unused)
{
const int32_t countMax = 64;
VDSP退出流程相关的适配说明
系统中依赖dev_control线程正常运行,用户通过enable宏CONFIG_PLATFORM_INIT_BUILTIN_THREADS 来控制由hb_platform_init函数启动,如果用户没有enable就需要创建相应的线程,同时用户线程需遵循下述的流程:
(1)在用户任务循环线程中添加退出判断的逻辑:调用函数hb_is_thread_stop,返回1表示需要立即退出线程
VDSP log使用场景限制
(1)当前中断handler不支持直接或间接使用标准C库的printf,如果使用会出现VDSP挂死
(2)在hb_platform_init之前不支持直接或间接使用标准C库的printf,如果使用可能引发低概率boot失败的问题
VDSP编译注意事项
(1)需要定义平台宏,不同平台对应的宏包括:CONFIG_ARCH_HOBOT_SOC_SIGIE、CONFIG_ARCH_HOBOT_SOC_SIGIP、CONFIG_ARCH_HOBOT_SOC_SIGIB
(2)默认支持不同的VDSP CORE可加载同一个FW,同时就不需要定义CONFIG_VDSP宏(CONFIG_VDSP0/CONFIG_VDSP1不再被使用)
安全下电和休眠流程
(1)在安全下电和休眠流程的处理流程中,驱动会检查VDSP Firmware状态并确保已经进入停止状态后才继续相应的动作;同时建议在APP中实现VDSP退出流程
VDSP sample
功能概述
本章节介绍S100系列SOC芯片平台的VDSP用例,该用例实现了VDSP的启停、核间消息的收发和VDSP图像处理。
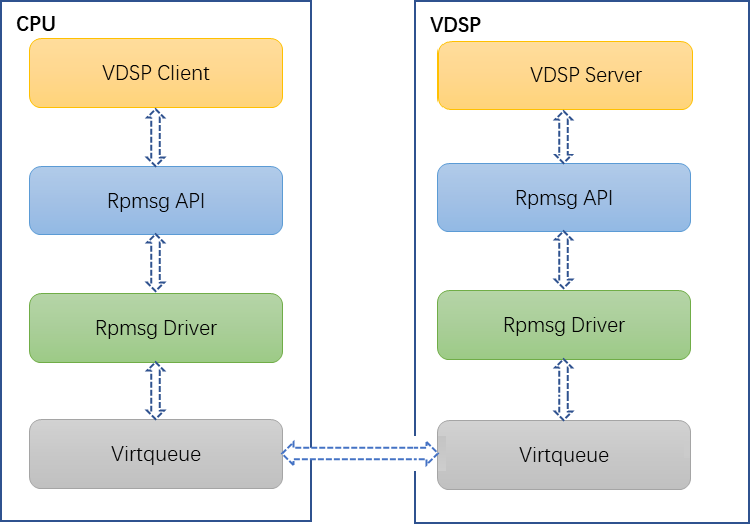
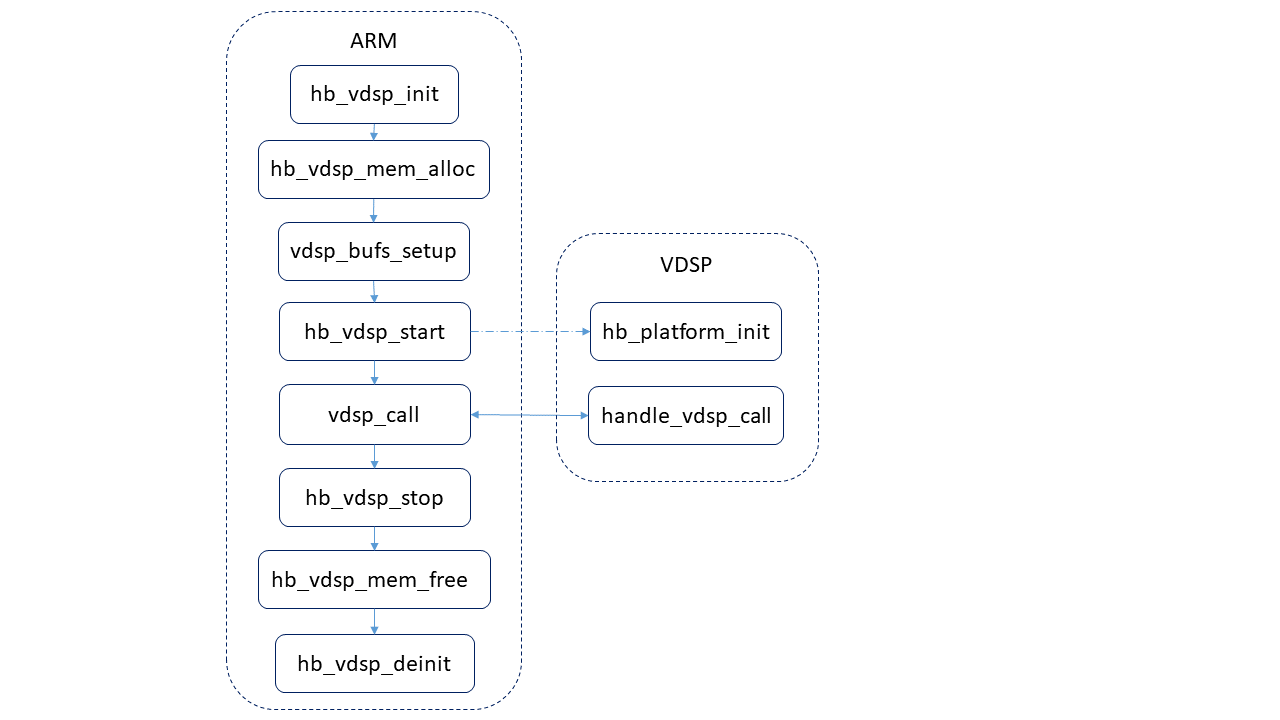
软件架构说明
需要同时实现ARM侧和VDSP两侧的开发,当前基于RPMSG IPC通信机制实现client/server业务交互逻辑。
ARM侧开发流程
ARM侧用户主要是加载VDSP Firmware,并连接VDSP侧的服务,作为client端向VDSP侧发送rpmsg计算请求。
VDSP侧开发流程
VDSP侧主要是初始化其运行环境、启动相关的服务(VDSP侧作为server端可启动多个服务,支持一对一的模式), 并能通过rpmsg机制接收和回复client端的信息,此外还可启动其他线程进行业务开发。
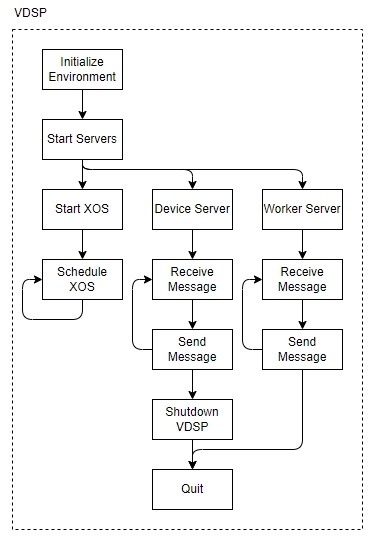
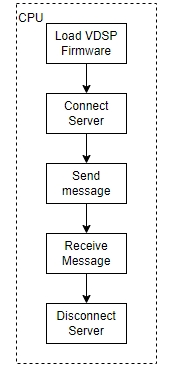
本用例流程说明:
ARM侧和VDSP的交互流程如下所示:
ARM侧:
- 启动VDSP
- 连接rpmsg server(dcore0_rpmsg_op)
- 向VDSP发送rpmsg
- 接收VDSP发送的rpmsg
- 断开rpmsg server
- 关闭VDSP
VDSP侧:
- 初始化环境
- 启动rpmsg server(dcore0_rpmsg_op)
- 接收ARM发送的rpmsg
- 根据接收到的rpmsg数据进行解析,并执行相应的图像处理函数
- 向ARM回�复rpmsg,其中包含执行的结果
代码位置与目录结构
代码路径
- 代码位置:
ARM侧:{sdk_dir}/source/hobot-sp-samples/debian/app/vdsp_demo/
DSP侧:{sdk_dir}/vdsp_fw/samples/libxi-sample/
- 目录结构:
#源码和二进制文件目录结构,不包括编译框架文件(Makefile、Kconfig等)
ARM:
└── src
└── vdsp_sample.c
DSP:
└── main.c
编译
编译说明
编译命令
# ARM侧sample编译可以直接在板端完成。sample在板端的路径如下所示:
/app/vdsp_demo/vdsp_sample
# 编译命令
cd /app/vdsp_demo/vdsp_sample && Makefile
# VDSP编译命令
cd vdsp_fw && ./make.sh
# VDSP侧输出文件:
{sdk_dir}/vdsp_fw/samples/libxi-sample/vdsp0-{build_type}
运行
支持平台
S100
硬件环境搭建
NA
运行参数说明
下面列出vdsp sample支持的输入参数,可以通过 --help 获取到所有参数的说明。
| 参数名 | 用法 | 默认值 |
|---|---|---|
dsp_id | dsp_id=<0> 指定 VDSP 0 | 0 |
vdsp_pathname | vdsp_pathname=*,指定 VDSP firmware 路径 | /app/vdsp_demo/vdsp_sample/res/q8sample |
sample-type | sample-type=<0,1>,指定 sample 类型:0 表示基础 sample,1 表示完整链路 sample | 1 |
help | 打印帮助信息 | — |
运行结果说明
root@ubuntu:/app/vdsp_demo/vdsp_sample# ./vdsp_sample
vdsp_sample_cxt_s:
vdsp_id:0
vdsp_pathname:/app/vdsp_demo/vdsp_sample/res/q8sample
vdsp_call_params_s:
cmd:xi-sample-flip
type:1
buf_width:128
buf_height:128
vdsp_buf0:0xfffc0000
vdsp_buf1:0xfffd0000
recv_buf: 0
运行结束后会得到上述log输出,recv_buf返回0表示执行正常。
VDSP API介绍
核间通信RPMSG接口
核间通信RPMSG 头文件和链接库
-
VDSP侧
头文件:hb_rpmsg_interface.h
链接库:无
-
Acore侧
头文件:hb_rpmsg_interface.h
链接库:librpmsg.so
核间通信RPMSG API 返回值
VDSP侧
#define RPMSG_ERR_INVALID_ARG (-1)
#define RPMSG_ERR_PATH_NOT_LINK (-2)
#define RPMSG_ERR_SERVER_NOT_CONNECT (-3)
#define RPMSG_ERR_OUT_OF_RES (-4)
#define RPMSG_ERR_SEND_BUF_OVERSIZE (-5)
#define RPMSG_ERR_NO_MEM (-6)
#define RPMSG_ERR_TIMEOUT (-7)
#define RPMSG_ERR_RECV_BUF_OVERFLOW (-8)
#define RPMSG_ERR_INVALID_SERVER (-9)
#define RPMSG_ERR_CRC_CHECK (-10)
Acore侧
#define RPMSG_ERR_INVALID_ARG (-1)
#define RPMSG_ERR_INVALID_SERVER (-2)
#define RPMSG_ERR_OUT_OF_RES (-3)
#define RPMSG_ERR_KER_USR_TRANS (-4)
#define RPMSG_ERR_SEND_BUF_OVERSIZE (-5)
#define RPMSG_ERR_NO_MEM (-6)
#define RPMSG_ERR_TIMEOUT (-7)
#define RPMSG_ERR_SIGNAL_STOP (-8)
#define RPMSG_ERR_RECV_BUF_OVERFLOW (-9)
#define RPMSG_ERR_NOT_START_SERVER (-10)
#define RPMSG_ERR_CRC_CHECK (-11)
#define RPMSG_ERR_DRV_VERSION (-12)
#define RPMSG_ERR_UNKNOWN_ERR (-13)
核间通信RPMSG(VDSP侧) API
hb_rpmsg_start_server
【函数声明】
int32_t hb_rpmsg_start_server(const char* server_name, uint32_t flags, rl_ept_rx_cb_t rx_cb, void* rx_cb_data, uint32_t timeout, rpmsg_handle** handle);
【参数描述】
- [IN] server_name:服务名称
- [IN] flags:通信特性
- [IN] rx_cb:接收报文的callback函数
- [IN] rx_cb_data:回调参数
- [IN] timeout:接收超时时间(单位:ms)
- [OUT] handle:代表rpmsg通信句柄
用户可用的服务名称:
VDSP0
- dcore0_acore_heart.
- dcore0_rpmsg_bpu.
- dcore0_rpmsg_op.
VDSP1
- dcore1_acore_heart.
- dcore1_rpmsg_bpu.
- dcore1_rpmsg_op.
S100上没有VDSP1,使用时需要注意。
【说明】
Flags参数的使用(使用位操作符):
- RPMSG_F_BLOCK 阻塞式传输
- RPMSG_F_NONBLOCK 非阻塞式传输
- RPMSG_F_CRC_CHECK 支持CRC check
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
开启rpmsg通信服务
【示例代码】
#include <hb_rpmsg_interface.h>
#include <hb_vdsp_log.h>
#include <platform.h>
#ifdef CNFIG_VDSP0
static char test_server_name[] = "dcore0_rpmsg_op";
#elif CNFIG_VDSP1
static char test_server_name[] = "dcore1_rpmsg_op";
#endif
#define CORE_COM_TX_RX_PAYLOAD_SIZE (240)
#define MAX_PAYLAD (CORE_COM_TX_RX_PAYLOAD_SIZE)
static char buffer_rev[MAX_PAYLAD] = {0};
static char temp_hope[MAX_PAYLAD] ="I am test string,hope you can see me";
int32_t mycallback(void *payload, uint32_t payload_len, uint32_t src, void *priv)
{
printf("[vdsp0],mycallback test! payload is 0x%x ,payload_len is %d, \
src is %d\n",payload,payload_len,src);
memcpy((void*)buffer_rev, payload, payload_len);
}
int32_t rpmsg_test()
{
int32_t ret;
rpmsg_handle *handle = NULL;
//recv, block
ret = hb_rpmsg_start_server(test_server_name, RPMSG_F_BLOCK |
RPMSG_F_QUEUE_RECV, mycallback, NULL,0, &handle);
if(ret != 0) {
DSP_ERR("hb_rpmsg_start_server fail!,ret = %d\n", ret);
hb_rpmsg_stop_server(handle);
return -1;
}
DSP_INF("%s server start,(block/recv) way!!\n", test_server_name);
ret = hb_rpmsg_recv(handle, buffer_rev, MAX_PAYLAD);
if (ret < 0) {
DSP_ERR("hb_rpmsg_recv(block/recv) failed, ret = %d\n", ret);
hb_rpmsg_stop_server(handle);
return -1;
}
DSP_INF("hb_rpmsg_recv(block/recv), buffer_rev : %s\n", buffer_rev);
ret = hb_rpmsg_send(handle, buffer_rev, MAX_PAYLAD);
if (ret < 0) {
DSP_ERR("rpmsg_send error [[[%d]]]\n", ret);
hb_rpmsg_stop_server(handle);
return -1;
}
ret = hb_rpmsg_stop_server(handle);
if (ret < 0) {
DSP_ERR("server:%s stop error [[[%d]]]\n", test_server_name, ret);
return -1;
}
DSP_INF("%s server stop(block/recv)!!\n", test_server_name);
return 0;
}
hb_rpmsg_stop_server
【函数声明】
int32_t hb_rpmsg_stop_server(rpmsg_handle* handle);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
停止rpmsg通信服务
【示例代码】
hb_rpmsg_send
【函数声明】
int32_t hb_rpmsg_send(const rpmsg_handle* handle, char *buf, uint32_t len);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [IN] buf:要发送的数据地址
- [IN] len:要发送的数据长度,可选值为: 1 ~ 240
【返回值】
- 成功:实际发送的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
发送通信服务帧数据
【示例代码】
hb_rpmsg_recv
【函数声明】
int32_t hb_rpmsg_recv(rpmsg_handle* handle, char* buf, uint32_t len);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [OUT] buf:接收数据的地址
- [IN] len:接收数据的长度,可选值为: 1 ~ 240
【返回值】
- 成功:实际接收的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值 【功能描述】
接收通信服务帧数据
【示例代码】
hb_rpmsg_send_timeout
【函数声明】
int32_t hb_rpmsg_send_timeout(const rpmsg_handle* handle, char* buf, uint32_t len, uint32_t timeout);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [IN] buf:要发送的数据地址
- [IN] len:要发送的数据长度,可选值为: 1 ~ 240
- [IN] timeout:发送阻塞时长
【返回值】
- 成功:实际发送的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
发送通信服务帧数据,带有timeout参数
【示例代码】
#include <hb_rpmsg_interface.h>
#include <hb_vdsp_log.h>
#include <platform.h>
#ifdef CNFIG_VDSP0
static char test_server_name[] = "dcore0_rpmsg_op";
#elif CNFIG_VDSP1
static char test_server_name[] = "dcore1_rpmsg_op";
#endif
#define CORE_COM_TX_RX_PAYLOAD_SIZE (240)
#define MAX_PAYLAD (CORE_COM_TX_RX_PAYLOAD_SIZE)
static char buffer_rev[MAX_PAYLAD] = {0};
static char temp_hope[MAX_PAYLAD] ="I am test string,hope you can see me";
int32_t mycallback(void *payload, uint32_t payload_len, uint32_t src, void *priv)
{
printf("[vdsp0],mycallback test! payload is 0x%x ,payload_len is %d, \
src is %d\n",payload,payload_len,src);
memcpy((void*)buffer_rev, payload, payload_len);
}
int32_t rpmsg_test()
{
int32_t ret;
rpmsg_handle *handle = NULL;
//recv, block
ret = hb_rpmsg_start_server(test_server_name, RPMSG_F_BLOCK |
RPMSG_F_QUEUE_RECV, mycallback, NULL,0, &handle);
if(ret != 0) {
DSP_ERR("hb_rpmsg_start_server fail!,ret = %d\n", ret);
hb_rpmsg_stop_server(handle);
return -1;
}
DSP_INF("%s server start,(block/recv) way!!\n", test_server_name);
ret = hb_rpmsg_recv_timeout(handle, buffer_rev, MAX_PAYLAD, 1000u);
if (ret < 0) {
DSP_ERR("hb_rpmsg_recv(block/recv) failed, ret = %d\n", ret);
hb_rpmsg_stop_server(handle);
return -1;
}
DSP_INF("hb_rpmsg_recv(block/recv), buffer_rev : %s\n", buffer_rev);
ret = hb_rpmsg_send_timeout(handle, buffer_rev, MAX_PAYLAD, 1000u);
if (ret < 0) {
DSP_ERR("rpmsg_send error [[[%d]]]\n", ret);
hb_rpmsg_stop_server(handle);
return -1;
}
ret = hb_rpmsg_stop_server(handle);
if (ret < 0) {
DSP_ERR("server:%s stop error [[[%d]]]\n", test_server_name, ret);
return -1;
}
DSP_INF("%s server stop(block/recv)!!\n", test_server_name);
return 0;
}
hb_rpmsg_recv_timeout
【函数声明】
int32_t hb_rpmsg_recv_timeout(rpmsg_handle* handle, char* buf, uint32_t len, uint32_t timeout);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [OUT] buf:接收数据的地址
- [IN] len:接收数据的长度,可选值为: 1 ~ 240
- [IN] timeout:接收阻塞时间
【返回值】
- 成功:实际接收的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
接收通信服务帧数据,带有timeout参数
【示例代码】
核间通信RPMSG(Acore侧) API
hb_rpmsg_connect_server
【函数声明】
int32_t hb_rpmsg_connect_server(char *server_name, int flags, int timeout, rpmsg_handle **handle);
【参数描述】
- [IN] server_name:服务名称
- [IN] flags:通信特性
- [IN] timeout:阻塞模式下的超时时间(单位:ms)
- [OUT] handle:返回rpmsg通信句柄
【说明】
Flags参数的使用(使用位操作符):
- RPMSG_F_BLOCK 阻塞式传输
- RPMSG_F_NONBLOCK 非阻塞式传输
- RPMSG_F_CRC_CHECK 支持CRC check
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
连接通讯服务
【示例代码】
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <rpmsg_lib.h>
void usage(char *s)
{
printf("usage: %s server_name timeout(ms)\n", s);
}
int main(int argc, char *argv[])
{
int ret = 0;
struct rpmsg_handle *handle = NULL;
char buffer[240] = {0};
int timeout = 0;
int cnt_max_connect = 10;
uint32_t major, minor, patch;
char *p;
if (argc != 3) {
usage(argv[0]);
return -1;
}
timeout = atoi(argv[2]);
if (timeout < 0) {
printf("invalid timeout: %d\n", timeout);
usage(argv[0]);
return -1;
}
ret = hb_rpmsg_get_version(&major, &minor, &patch);
if (ret < 0) {
printf("rpmsg get version failed\n");
return ret;
} else {
printf("rpmsg verion: %u.%u.%u\n", major, minor, patch);
}
reconnect:
ret = hb_rpmsg_connect_server(argv[1], RPMSG_F_BLOCK, timeout,
&handle);
if (ret < 0) {
--cnt_max_connect;
if ((ret == RPMSG_ERR_NOT_START_SERVER) && (cnt_max_connect)) {
printf("rpmsg_connect_server error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
usleep(100 * 1000);
goto reconnect;
} else {
printf("rpmsg_connect_server error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
return -1;
}
}
while (1) {
ret = hb_rpmsg_send(handle, buffer, 240);
if (ret < 0) {
printf("rpmsg_send error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
hb_rpmsg_disconnect_server(handle);
return -1;
} else
printf("recv log: %s\n", buffer);
ret = hb_rpmsg_recv(handle, buffer, 240);
if (ret < 0) {
printf("rpmsg_recv error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
hb_rpmsg_disconnect_server(handle);
return -1;
}
}
}
return 0;
}
hb_rpmsg_disconnect_server
【函数声明】
int32_t hb_rpmsg_disconnect_server(rpmsg_handle* handle);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
断开通信服务
【示例代码】
hb_rpmsg_send
【函数声明】
int32_t hb_rpmsg_send(const rpmsg_handle* handle, char *buf, int32_t len);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [IN] buf:要发送的数据地址
- [IN] len:要发送的数据长度,可选值为: 1 ~ 240
【返回值】
- 成功:实际发送的字节数
- 失败:异常为负值错�误码,参考 核间通信RPMSG API返回值
【功能描述】
发送特定通信服务帧数据
【示例代码】
hb_rpmsg_recv
【函数声明】
int32_t hb_rpmsg_recv(rpmsg_handle* handle, char* buf, int32_t len);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [OUT] buf:接收数据的地址
- [IN] len:接收数据的长度,可选值为: 1 ~ 240
【返回值】
- 成功:实际接收的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
接收通信服务帧数据
hb_rpmsg_send_timeout
【函数声明】
int32_t hb_rpmsg_send_timeout(const rpmsg_handle* handle, char *buf, int32_t len, int32_t timeout);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [IN] buf:要发送的数据地址
- [IN] len:要发送的数据长度,可选值为: 1 ~ 240
- [IN] timeout:发送阻塞时长
【返回值】
- 成功:实际发送的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
发送通信服务帧数据,带有timeout参数
【示例代码】
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <rpmsg_lib.h>
void usage(char *s)
{
printf("usage: %s server_name timeout(ms)\n", s);
}
int main(int argc, char *argv[])
{
int ret = 0;
struct rpmsg_handle *handle = NULL;
char buffer[240] = {0};
int timeout = 0;
int cnt_max_connect = 10;
if (argc != 3) {
usage(argv[0]);
return -1;
}
timeout = atoi(argv[2]);
if (timeout < 0) {
printf("invalid timeout: %d\n", timeout);
usage(argv[0]);
return -1;
}
reconnect:
ret = hb_rpmsg_connect_server(argv[1], RPMSG_F_BLOCK, timeout,
&handle);
if (ret < 0) {
--cnt_max_connect;
if ((ret == RPMSG_ERR_NOT_START_SERVER) && (cnt_max_connect)) {
printf("rpmsg_connect_server error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
usleep(100 * 1000);
goto reconnect;
} else {
printf("rpmsg_connect_server error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
return -1;
}
}
while (1) {
ret = hb_rpmsg_send_timeout(handle, buffer, 240, 1000);
if (ret < 0) {
printf("rpmsg_send error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
hb_rpmsg_disconnect_server(handle);
return -1;
} else
printf("recv log: %s\n", buffer);
ret = hb_rpmsg_recv_timeout(handle, buffer, 240, 1000);
if (ret < 0) {
printf("rpmsg_recv error[%d]: %s\n", ret,
hb_rpmsg_error_message(ret));
hb_rpmsg_disconnect_server(handle);
return -1;
}
}
}
return 0;
}
hb_rpmsg_recv_timeout
【函数声明】
int32_t hb_rpmsg_recv_timeout(rpmsg_handle* handle, char* buf, int32_t len, int32_t timeout);
【参数描述】
- [IN] handle:代表rpmsg通信句柄
- [OUT] buf:接收数据的地址
- [IN] len:接收数据的长度,可选值为: 1 ~ 240
- [IN] timeout:接收阻塞时间
【返回值】
- 成功:实际接收的字节数
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
接收通信服务帧数据,带有timeout参数
��【示例代码】
hb_rpmsg_get_version
【函数声明】
int32_t hb_rpmsg_get_version(uint32_t* major, uint32_t* minor, uint32_t* patch);
【参数描述】
- [OUT] major:major版本号
- [OUT] minor:minor版本号
- [OUT] patch:patch
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 核间通信RPMSG API返回值
【功能描述】
获取rpmsg动态库版本号
【示例代码】
hb_rpmsg_error_message
【函数声明】
const char* hb_rpmsg_error_message(int32_t error_code);
【参数描述】
- [IN] error_code:错误码
【返回值】
- 成功:错误描述字符串
- 失败:NULL
【功能描述】
将错误码转为错误描述字符串
【示例代码】
核间通信IPCFHAL接口
核间通信IPCFHAL头文件和链接库
-
VDSP侧
头文件:hb_ipcfhal_interface.h ipcf_hal_errno.h
链接库:无
-
Acore侧
头文件:hb_ipcfhal_interface.h ipcf_hal_errno.h
链接库:libhbipcfhal.so
核间通信IPCFHAL API返回值
#define IPCF_HAL_E_OK 0/**< General OK*/
#define IPCF_HAL_E_NOK 1/**< General Not OK*/
#define IPCF_HAL_E_CONFIG_FAIL 2/**< Config fail*/
#define IPCF_HAL_E_WRONG_CONFIGURATION 3/**< Wrong configuration*/
#define IPCF_HAL_E_NULL_POINTER 4/**< A null pointer was passed as an argument*/
#define IPCF_HAL_E_PARAM_INVALID 5/**< A parameter was invalid*/
#define IPCF_HAL_E_LENGTH_TOO_SMALL 6/**< Length too small*/
#define IPCF_HAL_E_INIT_FAILED 7/**< Initialization failed*/
#define IPCF_HAL_E_UNINIT 8/**< Called before initialization*/
#define IPCF_HAL_E_BUFFER_OVERFLOW 9/**< Source address or destination address Buffer overflow*/
#define IPCF_HAL_E_ALLOC_FAIL 10/**< Source alloc fail*/
#define IPCF_HAL_E_TIMEOUT 11/**< Expired the time out*/
#define IPCF_HAL_E_REINIT 12/**< Re initilize*/
#define IPCF_HAL_E_BUSY 13/**< Busy*/
#define IPCF_HAL_E_CHANNEL_INVALID 14/**< Channel is invalid*/
API返回值为上述宏定义取负值。
核间通信IPCFHAL(VDSP侧) API
hb_ipcfhal_init
【函数声明】
int32_t hb_ipcfhal_init(ipcfhal_chan_t *channel);
【参数描述】
- [IN] channel:ipcfhal channel信息
【返回值】
- 成功: =0
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL初始化
【IPCFHAL初始化 示例代码】
完整代码编译和运行参考/app/vdsp_demo/vdsp_ipcfhal_sample/READTME.md
#define CFG_FILE "config.json"
#define DATA_LEN 1024
static int32_t ipcfhal_thread_func(void *arg, int32_t unused) {
int32_t ret;
char *ch_name = "cpu-vdsp-ins0ch0";
ipcfhal_chan_t channel;
uint8_t rx_data[DATA_LEN] = {0};
uint8_t tx_data[DATA_LEN] = {0};
int32_t timeout = -1;
uint32_t major, minor, patch;
ret = vdsp_server_ready(BOOT_COMPLETE_EVENT_MASK_BIT1 | BOOT_COMPLETE_EVENT_MASK_BIT2);
ret = hb_ipcfhal_get_version(&major, &minor, &patch);
if (ret < 0) {
return ret;
} else {
printf("ipcfhal verion: %u.%u.%u\n", major, minor, patch);
}
ret = hb_ipcfhal_getchan_byjson(ch_name, &channel, CFG_FILE);
if (ret < 0)
return ret;
ret = hb_ipcfhal_init(&channel);
if (ret < 0)
return ret;
ret = hb_ipcfhal_config(&channel);
if (ret < 0)
return ret;
while (hb_is_thread_stop() != 1) {
memset(tx_data, 0x55, DATA_LEN);
ret = hb_ipcfhal_send(tx_data, DATA_LEN, &channel);
if (ret < 0)
continue;
memset((void *)rx_data, 0, DATA_LEN);
ret = hb_ipcfhal_recv(rx_data, DATA_LEN, timeout, &channel);
if (ret < 0)
continue;
for (int i = 0; i < DATA_LEN; i++) {
if (rx_data[i] != 0x55) {
DSP_ERR("recv rx_data[%d] err. 0x%x\n", i, rx_data[i]);
break;
}
}
xos_thread_sleep_msec(2);
}
return ret;
}
hb_ipcfhal_getchan_byjson
【函数声明】
int32_t hb_ipcfhal_getchan_byjson(const char *name, ipcfhal_chan_t *channel, const char *json_file);
【参数描述】
- [IN] name:ipcfhal channel 名字
- [IN] json_file:ipcfhal json配置文件
- [OUT] channel:ipcfhal channel信息
【返回值】
- 成功: 通道id
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL从json配置文件获取channel
【示例代码】
hb_ipcfhal_config
【函数声明】
int32_t hb_ipcfhal_config(ipcfhal_chan_t *channel);
【参数描述】
- [IN] channel:ipcfhal channel信息
【返回值】
- 成功: >=0
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL 配置channel
【示例代码】
hb_ipcfhal_send
【函数声明】
int32_t hb_ipcfhal_send(const uint8_t *data, int16_t length, ipcfhal_chan_t *channel);
【参数描述】
- [IN] data:发送的数据buffer
- [IN] length:发送的buffer长度
- [IN] channel:ipcfhal channel信息
【返回值】
- 成功: 实际发送的字节数
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL发送消息
【示例代码】
hb_ipcfhal_recv
【函数声明】
int32_t hb_ipcfhal_recv(uint8_t *data, int16_t length, int32_t timeout, ipcfhal_chan_t *channel);
【参数描述】
- [IN] length:buffer最大长度
- [IN] timeout:0 非阻塞, >0 阻塞超时ms, -1 阻塞.
- [IN] channel:ipcfhal channel信息
- [OUT] data:接收的数据buffer
【返回值】
- 成功: 实际接收的字节数
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL接收消息
【示例代码】
hb_ipcfhal_deinit
【函数声明】
int32_t hb_ipcfhal_deinit(ipcfhal_chan_t *channel);
【参数描述】
- [IN] channel:ipcfhal channel信息
【返回值】
- 成功: =0
- 失败: <0,参考 核间通信IPCFHAL API返回值
��【功能描述】
IPCFHAL反初始化
【示例代码】
hb_ipcfhal_trans_err
【函数声明】
int32_t hb_ipcfhal_trans_err(int32_t err_code, char **err_str);
【参数描述】
- [IN] err_code:返回值错误编码
- [OUT] err_str:转换错误字符串
【返回值】
- 成功: =0
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
转换IPCFHAL错误码为错误字符串
【示例代码】
hb_ipcfhal_get_version
【函数声明】
int32_t hb_ipcfhal_get_version(uint32_t *major, uint32_t *minor, uint32_t *patch);
【参数描述】
- [OUT] major:libhbipcfhal major 版本号
- [OUT] minor:libhbipcfhal minor 版本号
- [OUT] patch:libhbipcfhal patch 版本号
【返回值】
- 成功: =0
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
获取IPCFHAL库的版本号
【示例代码】
hb_ipcfhal_register_callback
【函数声明】
int32_t hb_ipcfhal_register_callback(uint8_t *user_data, user_cb_t user_cb, ipcfhal_chan_t *channel);
【参数描述】
- [IN] user_data:用户数据
- [IN] user_cb:用户回调函数
- [IN] channel:ipcfhal channel信息
【返回值】
- 成功: =0
- 失败: !0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL注册回调函数,VDSP侧接收方式配置为回调方式;参数为NULL时,注销回调函数,VDSP侧接收方式配置为recv方式;同一实例多通道使用callback时会阻塞执行,不同实例通道间callback会并发执行。
【IPCFHAL注册回调函数 示例代码】
static void test_ipcfhal_callback_func(uint8_t *userdata, int32_t instance, int32_t chan_id,
uint8_t *buf, uint64_t size)
{
printf("userdata[0x%llx] ins[%d] ch[%d] buf[0x%llx] size[%llu]\n",
(uint64_t)userdata, instance, chan_id, (uint64_t)buf, size);
*userdata = 1u;
}
static int32_t hb_libipchal_register_callback_func(void)
{
int32_t ret = 0;
uint8_t user_flag = 0;
uint32_t cnt = 100u;
uint8_t rx_data[1024] = {0};
ipcfhal_chan_t channel;
printf("hb_libipchal_register_callback_func start\n");
(void)hb_ipcfhal_getchan_byjson("cpu-vdsp-ch0", &channel, "ipcf_config.json");
(void)hb_ipcfhal_init(&channel);
(void)hb_ipcfhal_config(&channel);
(void)hb_ipcfhal_register_callback(&user_flag, test_ipcfhal_callback_func, &channel);
while ((user_flag == 0) && (cnt--) ) {
xos_thread_sleep_msec(100);
}
(void)hb_ipcfhal_register_callback(NULL, NULL, &channel);
(void)hb_ipcfhal_deinit(&channel);
printf("hb_libipchal_register_callback_func end\n");
return 0;
}
核间通信IPCFHAL(Acore侧) API
hb_ipcfhal_init
【函数声明】
int32_t hb_ipcfhal_init(ipcfhal_chan_t *channel);
【参数描述】
- [IN] channel:ipcfhal通道
【返回值】
- 成功: =0
- 失败: !0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL初始化
【IPCFHAL初始化 示例代码】
完整代码编译和运行参考/app/vdsp_demo/vdsp_ipcfhal_sample/READTME.md
{
"log_level": 0,
"config_num": 2,
"config_num_max":256,
"config_0": {
"name": "cpu2vdsp_ins22ch0",
"instance": 22,
"channel": 0,
"pkg_size_max": 4096,
"fifo_size": 64000,
"fifo_type": 0,
"ipcf_dev_path":"/dev/ipcdrv",
"ipcf_dev_name":"ipcdrv"
},
"config_1": {
"name": "cpu2vdsp_ins22ch1",
"instance": 22,
"channel": 1,
"pkg_size_max": 4096,
"fifo_size": 64000,
"fifo_type": 0,
"ipcf_dev_path":"/dev/ipcdrv",
"ipcf_dev_name":"ipcdrv"
}
}
/*************************************************************************
* COPYRIGHT NOTICE
* Copyright 2022-2024, D-Robotics Co., Ltd.
* All rights reserved.
*************************************************************************/
/******************************************************************************/
/*----------------------------------Includes----------------------------------*/
/******************************************************************************/
#include <sys/time.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <getopt.h>
#include <pthread.h>
#include <semaphore.h>
#include <signal.h>
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <logging.h>
#include <hb_vdsp_mgr.h>
#include "hb_ipcf_hal.h"
#include "ipcf_hal_errno.h"
/******************************************************************************/
/*-----------------------------------Macros-----------------------------------*/
/******************************************************************************/
#define SMP_1KB_LEN (1024)/**< sample send and recv data length*/
#define SMP_TIMEOUT_VAL (1000)/**< sample recv timeout value*/
#define SMP_USLEEP_1MS (1000u)/**< sample sleep 1ms*/
#define SMP_USLEEP_10MS (10000u)/**< sample sleep 10ms*/
#define SMP_SLEEP_1S (1u)/**< sample sleep 1s*/
#define SMP_RUN_TIME (10l)/**< sample run time, unit: s*/
#define SMP_100CNT (100u)/**< sample 100 counts*/
#define SMP_CHAN_NUM (1)/**< sample channel number*/
#define SMP_THREAD_NUM (SMP_CHAN_NUM * 2)/**< sample thread number*/
#define SMP_ROLL_POS (4)/**< sample rolling count position*/
#define SMP_CFG_FILE "/app/vdsp_demo/vdsp_ipcfhal_sample/ipcfhal_config.json"
/******************************************************************************/
/*-------------------------Function Prototypes--------------------------------*/
/******************************************************************************/
void *send_pthread(void *argv);
void *recv_pthread(void *argv);
/******************************************************************************/
/*---------------------------- Local Function -------------------------------*/
/******************************************************************************/
/*thread arg*/
struct th_arg_t {
ipcfhal_chan_t ch;/**< ipcfhal channel*/
bool Is_Enable;/**< thread status*/
uint32_t data_len;/**< send data length*/
uint32_t sleep_time;/**< send period*/
bool result;/**< thread running result*/
};
volatile sig_atomic_t g_running = true;
void signal_handler(int sig) {
if (sig == SIGINT)
g_running = false;
}
static void *tx_pthread(void *argv)
{
int32_t ret = 0;
struct th_arg_t *pth_arg = (struct th_arg_t *)argv;
uint8_t tx_data[SMP_1KB_LEN] = {0u};
if (pth_arg == NULL) {
return NULL;
}
while (pth_arg->Is_Enable) {
memset(tx_data, 0x55, SMP_1KB_LEN);
ret = hb_ipcfhal_send(tx_data, pth_arg->data_len, &pth_arg->ch);
if (ret != (int32_t)pth_arg->data_len) {/*return data_len*/
pr_err("Ins[%u]Ch[%u] send failed\n",
pth_arg->ch.instance, pth_arg->ch.id);
pth_arg->result = false;
}
usleep(pth_arg->sleep_time);
}
pr_info("[%s End]Ins[%u]Ch[%u]\n",
__func__, pth_arg->ch.instance, pth_arg->ch.id);
return NULL;
}
static void *rx_pthread(void *argv)
{
int32_t ret = 0;
struct th_arg_t *pth_arg = (struct th_arg_t *)argv;
uint8_t data[SMP_1KB_LEN] = {0u};
int32_t timeout = SMP_TIMEOUT_VAL;
if (pth_arg == NULL) {
return NULL;
}
while (pth_arg->Is_Enable) {
memset(data, 0u, pth_arg->data_len);
ret = hb_ipcfhal_recv(data, SMP_1KB_LEN, timeout, &pth_arg->ch);
if (ret != -IPCF_HAL_E_TIMEOUT && ret < 0) {
pr_err("Ins[%u]Ch[%u] recv failed: %d\n",
pth_arg->ch.instance, pth_arg->ch.id, ret);
pth_arg->Is_Enable = false;
pth_arg->result = false;
break;
}
if (ret >= 0) {
for (int i = 0; i < SMP_1KB_LEN; i++) {
if (data[i] != 0x55) {
pr_err("recv data[%d] err. 0x%x\n", i, data[i]);
break;
}
}
} else if (ret == -IPCF_HAL_E_TIMEOUT) {
pth_arg->result = false;
}
usleep(pth_arg->sleep_time);
}
pr_info("[%s End]Ins[%u]Ch[%u]\n",
__func__, pth_arg->ch.instance, pth_arg->ch.id);
return NULL;
}
/******************************************************************************/
/*---------------------------- Global Function -------------------------------*/
/******************************************************************************/
int main(int argc, char *argv[])
{
const char *json_path = SMP_CFG_FILE;
struct timespec test_start_time, test_cur_time;
int32_t ret = 0;
bool result = true;
pthread_t thread_tid[SMP_THREAD_NUM];
struct th_arg_t thread_arg[SMP_CHAN_NUM];
const char *chan_name[SMP_CHAN_NUM] = {
"cpu2vdsp_ins22ch0"
};
int32_t vdsp_id = 0;
int32_t timeout = 1000;
const char *vdsp_pathname = "/app/vdsp_demo/vdsp_ipcfhal_sample/res/q8sample";
signal(SIGINT, signal_handler);
ret = hb_vdsp_init(vdsp_id);
if (ret) {
pr_err("vdsp init failed, ret %d\n", ret);
return ret;
}
ret = hb_vdsp_start(vdsp_id, timeout, vdsp_pathname);
if (ret) {
pr_err("vdsp start failed, ret %d\n", ret);
return ret;
}
for (int32_t i = 0; i < SMP_CHAN_NUM; i++) {
/*step1: get channel info by json file*/
ret = hb_ipcfhal_getchan_byjson(chan_name[i], &thread_arg[i].ch, json_path);
if (ret < 0) {/* return channel id*/
pr_err("%s not found, ret %d\n", chan_name[i], ret);
hb_vdsp_stop(vdsp_id);
hb_vdsp_deinit(vdsp_id);
return ret;
}
/*step2: init channel*/
ret = hb_ipcfhal_init(&thread_arg[i].ch);
if (ret < 0) {
pr_err("%s init failed, ret %d\n", thread_arg[i].ch.name, ret);
for (int32_t j = 0; j < i; j++) {
hb_ipcfhal_deinit(&thread_arg[j].ch);
}
hb_vdsp_stop(vdsp_id);
hb_vdsp_deinit(vdsp_id);
return ret;
}
/*step3: config channel*/
ret = hb_ipcfhal_config(&thread_arg[i].ch);
if (ret < 0) {
pr_err("%s config failed, ret %d\n", thread_arg[i].ch.name, ret);
for (int32_t j = 0; j <= i; j++) {
hb_ipcfhal_deinit(&thread_arg[j].ch);
}
hb_vdsp_stop(vdsp_id);
hb_vdsp_deinit(vdsp_id);
return ret;
}
/*step4: set thread arg*/
thread_arg[i].sleep_time = SMP_USLEEP_10MS;
thread_arg[i].data_len = SMP_1KB_LEN;
thread_arg[i].Is_Enable = true;
thread_arg[i].result = true;
(void)pthread_create(&thread_tid[i], NULL, rx_pthread, &thread_arg[i]);
(void)pthread_create(&thread_tid[i+1], NULL, tx_pthread, &thread_arg[i]);
}
/*step5: run send and recv thread*/
clock_gettime(CLOCK_MONOTONIC, &test_start_time);
clock_gettime(CLOCK_MONOTONIC, &test_cur_time);
while (g_running) {
for (int32_t i = 0; i < SMP_CHAN_NUM; i++) {
if (thread_arg[i].Is_Enable == false)
break;
}
if (test_cur_time.tv_sec - test_start_time.tv_sec > SMP_RUN_TIME)
break;
sleep(SMP_SLEEP_1S);
clock_gettime(CLOCK_MONOTONIC, &test_cur_time);
}
/*step6: deinit channel*/
for (int32_t i = 0; i < SMP_CHAN_NUM; i++) {
void *ret;
thread_arg[i].Is_Enable = false;//stop thread
usleep(SMP_USLEEP_10MS);
pthread_join(thread_tid[i], &ret);
pthread_join(thread_tid[i+1], &ret);
(void)hb_ipcfhal_deinit(&thread_arg[i].ch);
result = (result && thread_arg[i].result);
}
if (result == false) {
pr_err("[ipc-sample] ipc sample running failed\n");
} else {
pr_info("[ipc-sample] ipc sample running success\n");
}
ret = hb_vdsp_stop(vdsp_id);
if (ret) {
pr_err("vdsp stop failed, ret %d\n", ret);
return ret;
}
ret = hb_vdsp_deinit(vdsp_id);
if (ret) {
pr_err("vdsp deinit failed, ret %d\n", ret);
return ret;
}
return ret;
}
hb_ipcfhal_getchan_byjson
【函数声明】
int32_t hb_ipcfhal_getchan_byjson(const char *name, ipcfhal_chan_t *channel, const char *json_file);
【参数描述】
- [IN] name:ipcfhal channel 名字
- [IN] json_file:ipcfhal json配置文件
- [OUT] channel:ipcfhal channel信息
【返回值】
- 成功: >=0
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL从json配置文件获取channel,channel初始化后,不支持用户修改结构体成员值。
【示例代码】
hb_ipcfhal_config
【函数声明】
int32_t hb_ipcfhal_config(ipcfhal_chan_t *channel);
【参数描述】
- [IN] channel:ipcfhal channel信息
【返回值】
- 成功: >=0
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL 配置channel
【示例代码】
hb_ipcfhal_send
【函数声明】
int32_t hb_ipcfhal_send(const uint8_t *data, uint32_t length, ipcfhal_chan_t *channel);
【参数描述】
- [IN] data:发送的数据buffer
- [IN] length:发送的buffer长度
- [IN] channel:channel信息
【返回值】
- 成功: 实际发送的字节数
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL发送消息
【示例代码】
hb_ipcfhal_recv
【函数声明】
int32_t hb_ipcfhal_recv(uint8_t *data, uint32_t length, int32_t timeout, ipcfhal_chan_t *channel);
【参数描述】
- [IN] length:buffer最大长度
- [IN] timeout:0 非阻塞, >0 阻塞超时ms, -1 阻塞
- [IN] channel:channel信息
- [OUT] data:接收的数据buffer
【返回值】
- 成功: 实际接收的字节数
- 失败: <0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL接收消息
【示例代码】
hb_ipcfhal_deinit
【函数声明】
int32_t hb_ipcfhal_deinit(ipcfhal_chan_t *channel);
【参数描述】
- [IN] channel:channel信息
【返回值】
- 成功: =0
- 失败: !0,参考 核间通信IPCFHAL API返回值
【功能描述】
IPCFHAL反初始化
【示例代码】
hb_ipcfhal_trans_err
【函数声明】
int32_t hb_ipcfhal_trans_err(int32_t err_code, char **err_str);
【参数描述】
- [IN] err_code:返回值错误编码
- [OUT] err_str:转换错误字符串
【返回值】
- 成功: =0
- 失败: !0,参考 核间通信IPCFHAL API返回值
【功能描述】
转换IPCFHAL错误码为错误字符串
【示例代码】
hb_ipcfhal_get_version
【函数声明】
int32_t hb_ipcfhal_get_version(uint32_t *major, uint32_t *minor, uint32_t *patch);
【参数描述】
- [OUT] major:libhbipcfhal major 版本号
- [OUT] minor:libhbipcfhal minor 版本号
- [OUT] patch:libhbipcfhal patch 版本号
【返回值】
- 成功: =0
- 失败: !0,参考 核间通信IPCFHAL API返回值
【功能描述】
获取IPCFHAL库的版本号
【示例代码】
HEAP分配接口
HEAP分配 头文件和链接库
-
VDSP侧
头文件:hb_mem_allocator.h
链接库:无
HEAP分配 API 返回值
#define HB_MEM_OK 0
#define HB_MEM_ERR_INVALID_PARAMS (-16777215)
#define HB_MEM_ERR_REPEAT_INIT (-16777214)
#define HB_MEM_ERR_HEAP_BUSY (-16777213)
#define HB_MEM_ERR_INSUFFICIENT_MEM (-16777212)
HEAP分配 API
hb_mem_heap_initialize
【函数声明】
int32_t hb_mem_heap_initialize(hb_mem_heap_t heap_id, void *start_vaddr, size_t heap_size, uint32_t align);
【参数描述】
- [IN] heap_id:有效的heap序号,可选值: 0, 1
- [IN] start_vaddr:heap起始地址
- [IN] heap_size:heap大小
- [IN] align:heap空间对齐的大小
【返回值】
- ��成功: =0
- 失败: <0,参考 HEAP分配 API 返回值
【功能描述】
初始化heap分配接口
【示例代码】
int32_t ret;
void *start_vaddr[2] = {(void *)heapDRAM0, heapDRAM1};
size_t heap_size[2] = {sizeof(heapDRAM0), sizeof(heapDRAM1)};
ret = hb_mem_heap_initialize(HB_MEMRY_HEAP_DRAM_0, start_vaddr[0],
heap_size[0], 0x10000);
if (ret < 0) {
printf("hb_mem_heap_initialize failed ret = %d\n", ret);
return ret;
}
ret = hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
if (ret < 0) {
printf("hb_mem_heap_deinitialize failed ret = %d\n", ret);
return ret;
}
return 0;
hb_mem_heap_deinitialize
【函数声明】
int32_t hb_mem_heap_deinitialize(hb_mem_heap_t heap_id);
【参数描述】
- [IN] heap_id:有效的heap序号,可选值: 0, 1
【返回值】
- 成功: =0
- 失败: <0,参考 HEAP分配 API 返回值
【功能描述】
解初始化heap分配接口
【示例代码】
int32_t ret;
void *start_vaddr[2] = {(void *)heapDRAM0, heapDRAM1};
size_t heap_size[2] = {sizeof(heapDRAM0), sizeof(heapDRAM1)};
ret = hb_mem_heap_initialize(HB_MEMRY_HEAP_DRAM_0, start_vaddr[0],
heap_size[0], 0x10000);
if (ret < 0) {
printf("hb_mem_heap_initialize failed ret = %d\n", ret);
return ret;
}
ret = hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
if (ret < 0) {
printf("hb_mem_heap_deinitialize failed ret = %d\n", ret);
return ret;
}
return 0;
hb_mem_heap_alloc
【函数声明】
int32_t hb_mem_heap_alloc(hb_mem_heap_t heap_id, size_t req_size, uint32_t align, void ** vaddr);
【参数描述】
- [IN] heap_id:有效的heap序号,可选值: 0, 1
- [IN] reg_size:分配的字节大小
- [IN] align:heap空间对齐的大小
- [OUT] vaddr:分配buffer的起始地址
【返回值】
- 成功: =0
- 失败: <0,参考 HEAP分配 API 返回值
【功能描述】
heap分配接口
【示例代码】
int32_t ret;
void *start_vaddr[2] = {(void *)heapDRAM0, heapDRAM1};
size_t heap_size[2] = {sizeof(heapDRAM0), sizeof(heapDRAM1)};
uint32_t malloc_alignment = 64;
void *vaddr = NULL;
ret = hb_mem_heap_initialize(HB_MEMRY_HEAP_DRAM_0, start_vaddr[0],
heap_size[0], 0x10000);
if (ret < 0) {
printf("hb_mem_heap_initialize failed ret = %d\n", ret);
return ret;
}
ret = hb_mem_heap_alloc(HB_MEMRY_HEAP_DRAM_0, heap_size[0],
malloc_alignment, &vaddr);
if (ret < 0) {
printf("hb_mem_heap_alloc failed ret = %d\n", ret);
hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
return ret;
}
ret = hb_mem_heap_free(HB_MEMRY_HEAP_DRAM_0, vaddr);
if (ret < 0) {
printf("hb_mem_heap_free failed ret = %d\n", ret);
hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
return ret;
}
ret = hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
return 0;
hb_mem_heap_free
【函数声明】
int32_t hb_mem_heap_free(hb_mem_heap_t heap_id, void *vaddr);
【参数描述】
- [IN] heap_id:有效的heap序号,可选值: 0, 1
- [IN] vaddr:已分配buffer的起始地址
【返回值】
- 成功: =0
- 失败: <0,参考 HEAP分配 API 返回值
【功能描述】
释放heap已分配的空间
【示例代码】
int32_t ret;
void *start_vaddr[2] = {(void *)heapDRAM0, heapDRAM1};
size_t heap_size[2] = {sizeof(heapDRAM0), sizeof(heapDRAM1)};
uint32_t malloc_alignment = 64;
void *vaddr = NULL;
ret = hb_mem_heap_initialize(HB_MEMRY_HEAP_DRAM_0, start_vaddr[0],
heap_size[0], 0x10000);
if (ret < 0) {
printf("hb_mem_heap_initialize failed ret = %d\n", ret);
return ret;
}
ret = hb_mem_heap_alloc(HB_MEMRY_HEAP_DRAM_0, heap_size[0],
malloc_alignment, &vaddr);
if (ret < 0) {
printf("hb_mem_heap_alloc failed ret = %d\n", ret);
hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
return ret;
}
ret = hb_mem_heap_free(HB_MEMRY_HEAP_DRAM_0, vaddr);
if (ret < 0) {
printf("hb_mem_heap_free failed ret = %d\n", ret);
hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
return ret;
}
ret = hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
if (ret < 0) {
printf("hb_mem_heap_deinitialize failed ret = %d\n", ret);
return ret;
}
return 0;
hb_mem_heap_get_status
【函数声明】
int32_t hb_mem_heap_get_status(hb_mem_heap_t heap_id, hb_mem_heap_status_t *heap_status);
【参数描述】
- [IN] heap_id:有效的heap序号,可选值: 0, 1
- [OUT] heap_status:heap状态信息
【返回值】
- 成功: =0
- 失败: <0,参考 HEAP分配 API 返回值
【功能描述】
获取heap分配状态
【示例代码】
int32_t ret;
void *start_vaddr[2] = {(void *)heapDRAM0, heapDRAM1};
size_t heap_size[2] = {sizeof(heapDRAM0), sizeof(heapDRAM1)};
hb_mem_heap_status_t heap_status = {0, };
ret = hb_mem_heap_initialize(HB_MEMRY_HEAP_DRAM_0, start_vaddr[0],
heap_size[0], 0x10000);
if (ret < 0) {
printf("hb_mem_heap_initialize failed ret = %d\n", ret);
return ret;
}
ret = hb_mem_heap_get_status(HB_MEMRY_HEAP_DRAM_0, &heap_status);
if (ret < 0) {
printf("hb_mem_heap_get_status failed ret = %d\n", ret);
hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
return ret;
}
ret = hb_mem_heap_deinitialize(HB_MEMRY_HEAP_DRAM_0);
if (ret < 0) {
printf("hb_mem_heap_deinitialize failed ret = %d\n", ret);
return ret;
}
return 0;
VDSP启停控制接口
VDSP启停控制 头文件和链接库
-
Acore侧
头文件:hb_vdsp_mgr.h
链接库:libvdsp.so
VDSP启停控制 API返回值
#define HB_VDSP_OK (0)
#define HB_VDSP_OPEN_DEV_ERR (-1)
#define HB_VDSP_START_IOCTL_ERR (-2)
#define HB_VDSP_STOP_IOCTL_ERR (-4)
#define HB_VDSP_GET_STATUS_IOCTL_ERR (-5)
#define HB_VDSP_RESET_IOCTL_ERR (-6)
#define HB_VDSP_PARAM_INVALID (-7)
#define HB_VDSP_SET_PATH_ERR (-8)
#define HB_VDSP_SET_NAME_ERR (-9)
#define HB_VDSP_CLOSE_DEV_ERR (-10)
#define HB_VDSP_ERR_IOC_GET_VERSION_INFO (-11)
#define HB_VDSP_ERR_IOC_MEM_ALLOC (-12)
#define HB_VDSP_ERR_IOC_MEM_FREE (-13)
#define HB_VDSP_ERR_IOC_SMMU_MAP (-14)
#define HB_VDSP_ERR_IOC_SMMU_UNMAP (-15)
#define HB_VDSP_ERR_INIT (-16)
#define HB_VDSP_ERR_DEINIT (-17)
#define HB_VDSP_ERR_NOT_INITED (-18)
#define HB_VDSP_ERR_ALLOC_COM_BUF (-19)
#define HB_VDSP_ERR_FREE_MEMBUF (-20)
#define HB_VDSP_ERR_GET_COM_BUF_WITH_VADDR (-21)
#define HB_VDSP_ERR_SMMU_MAP (-22)
#define HB_VDSP_ERR_SMMU_UNMAP (-23)
#define HB_VDSP_ERR_CHECK_VERSION (-24)
#define HB_VDSP_ERR_INSUFFICIENT_MEM (-25)
#define HB_VDSP_ERR_MISMATCH_INTERFACE (-26)
#define HB_VDSP_ERR_RBTREE_CREATE_NODE (-27)
#define HB_VDSP_ERR_RBTREE_INSERT_NODE (-28)
#define HB_VDSP_ERR_RBTREE_SEARCH_NODE (-29)
VDSP启停控制 API
hb_vdsp_get_version
【函数声明】
int32_t hb_vdsp_get_version(uint32_t *major, uint32_t *minor, uint32_t *patch);
【参数描述】
- [OUT] major:libvdsp major 版本号
- [OUT] minor:libvdsp minor 版本号
- [OUT] patch:libvdsp patch 版本号
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
获取VDSP启停控制库的版本号
【获取VDSP库版本号 示例代码】
#include <hb_vdsp_mgr.h>
int32_t boot_lib_version_test(int32_t dsp_id)
{
int32_t ret = 0;
uint32_t major, minor, patch;
ret = hb_vdsp_get_version(&major, &minor, &patch);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_get_version ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
printf("%s Get version %d.%d.%d.\n", TAG, major, minor, patch);
return ret;
}
hb_vdsp_init
【函数声明】
int32_t hb_vdsp_init(int32_t dsp_id);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
初始化VDSP启停控制库
【初始化VDSP库 示例代码】
#include <hb_vdsp_mgr.h>
int32_t boot_lib_init_test(int32_t dsp_id)
{
int32_t ret = 0;
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
return ret;
}
hb_vdsp_deinit
【函数声明】
int32_t hb_vdsp_deinit(int32_t dsp_id);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
释放VDSP启停控制库
【示例代码】
参考 hb_vdsp_init
hb_vdsp_start
【函数声明】
int32_t hb_vdsp_start(int32_t dsp_id, int32_t timeout, const char *pathname);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] timeout:0为异步; -1为同步; 大于0为同步timeout等待时间,ms单位
- [IN] pathname:vdsp镜像完整路径,包含镜像名字
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
启动 VDSP
【同步启动VDSP示例代码】
#include <hb_vdsp_mgr.h>
#define VDSP_BOOT_MODE_ASYNC (0)
#define VDSP_BOOT_MODE_SYNC (-1)
int32_t boot_lib_sync_test(int32_t dsp_id, const char* pathname)
{
int32_t ret = 0;
int32_t status = 0;
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_vdsp_start(dsp_id, VDSP_BOOT_MODE_SYNC, pathname);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_start ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_get_status(dsp_id, &status);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_get_status ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_stop(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_stop ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
printf("%s dsp%d boot sync pass !\n", __func__, dsp_id);
return ret;
}
boot_lib_sync_test(0, "/app/vdsp_demo/vdsp_sample/res/q8sample");
boot_lib_sync_test(1, "/app/vdsp_demo/vdsp_sample/res/q8sample");
【异步启动VDSP示例代码】
#include <hb_vdsp_mgr.h>
#include <poll.h>
#define VDSP_BOOT_MODE_ASYNC (0)
#define VDSP_BOOT_MODE_SYNC (-1)
int32_t boot_lib_async_test(int32_t dsp_id, const char* pathname)
{
int32_t ret = 0;
struct pollfd pollfds;
int32_t fd;
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_vdsp_start(dsp_id, VDSP_BOOT_MODE_ASYNC, pathname);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_start ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_get_fd(dsp_id, &fd);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_get_fd ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
pollfds.fd = fd;
pollfds.events = POLLIN | POLLRDNORM;
printf("%s dsp%d poll entry pollfds.events=0x%x fd-%d.\n", __func__, dsp_id, pollfds.events, fd);
ret = poll(&pollfds, 1, 600);
printf("%s dsp%d poll return pollfds.revents=0x%x ret-%d.\n", __func__, dsp_id, pollfds.revents, ret);
if (ret <= 0) {
printf("%s dev poll err: %d, %s\n", __func__, errno, strerror(errno));
hb_vdsp_close_fd(fd);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_close_fd(fd);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_close_fd ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_stop(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_stop ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
printf("%s dsp%d boot async pass !\n", __func__, dsp_id);
return ret;
}
boot_lib_async_test(0, "/app/vdsp_demo/vdsp_sample/res/q8sample");
boot_lib_async_test(1, "/app/vdsp_demo/vdsp_sample/res/q8sample");
hb_vdsp_stop
【函数声明】
int32_t hb_vdsp_stop(int32_t dsp_id);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
停止 VDSP
【示例代码】
hb_vdsp_get_status
【函数声明】
int32_t hb_vdsp_get_status(int32_t dsp_id, int32_t *status);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [OUT] status:VDSP 运行状态
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
获取 VDSP 运行状态
::: tip 该接口不支持多进程、多线程并发使用。 :::
【示例代码】
hb_vdsp_reset
【函数声明】
int32_t hb_vdsp_reset(int32_t dsp_id);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
复位 VDSP
【示例代码】
#include <hb_vdsp_mgr.h>
#define VDSP_BOOT_MODE_ASYNC (0)
#define VDSP_BOOT_MODE_SYNC (-1)
int32_t boot_lib_reset_test(int32_t dsp_id, const char* pathname)
{
int32_t ret = 0;
int32_t status = RPROC_OFFLINE;
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_vdsp_start(dsp_id, VDSP_BOOT_MODE_SYNC, pathname);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_start ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_get_status(dsp_id, &status);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_get_status ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_reset(dsp_id);
if (ret != HB_VDSP_OK) {
ALOGE("%s dsp%d hb_vdsp_reset ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_stop(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_stop ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
printf("%s dsp%d reset pass !\n", __func__, dsp_id);
return ret;
}
boot_lib_reset_test(0, "/app/vdsp_demo/vdsp_sample/res/q8sample");
boot_lib_reset_test(1, "/app/vdsp_demo/vdsp_sample/res/q8sample");
hb_vdsp_set_path
【函数声明】
int32_t hb_vdsp_set_path(int32_t dsp_id, const char* path);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] path:vdsp镜像完整路径,不包含镜像名字
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
设置 VDSP 镜像路径
【示例代码】
#include <hb_vdsp_mgr.h>
#define VDSP_BOOT_MODE_ASYNC (0)
#define VDSP_BOOT_MODE_SYNC (-1)
int32_t boot_lib_set_pathname_test(int32_t dsp_id, const char* path, const char* name)
{
int32_t ret = 0;
int32_t status = 0;
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_vdsp_set_path(dsp_id, path);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_set_path ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_set_name(dsp_id, name);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_set_name ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_start(dsp_id, VDSP_BOOT_MODE_SYNC, NULL);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_start ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_get_status(dsp_id, &status);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_get_status ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_stop(dsp_id);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_stop(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_stop ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
printf("%s dsp%d set path & name pass !\n", __func__, dsp_id);
return ret;
}
boot_lib_set_pathname_test(0, "/app/testcase/S05_VDSP/testsuite", "q8sample");
boot_lib_set_pathname_test(1, "/app/testcase/S05_VDSP/testsuite", "q8sample");
hb_vdsp_set_name
【函数声明】
int32_t hb_vdsp_set_name(int32_t dsp_id, const char* name);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] name:vdsp镜像名字
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
设置 VDSP 镜像名字
【示例代码】
hb_vdsp_get_fd
【函数声明】
int32_t hb_vdsp_get_fd(int32_t dsp_id, int32_t *retfd);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [OUT] retfd:vdsp设备fd句柄
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
打开并返回 VDSP 设备fd句柄
【示例代码】
hb_vdsp_close_fd
【函数声明】
int32_t hb_vdsp_close_fd(int32_t fd);
【参数描述】
- [IN] fd:vdsp设备fd句柄
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
关闭 VDSP 设备
【示例代码】
hb_vdsp_mem_alloc
【函数声明】
int32_t hb_vdsp_mem_alloc(int32_t dsp_id, uint64_t size, int64_t flags, uint64_t *va, uint64_t *iova);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] size:申请的内存大小
- [IN] flags:使用libhbmem申请内存的flags
- [OUT] va:使用libhbmem申请内存的虚拟地址
- [OUT] iova:映射成的vdsp设备地址
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
通过libvdsp申请内存并映射成vdsp可访问的设备地址
【申请内存并映射 示例代码】
#include <hb_vdsp_mgr.h>
int32_t boot_lib_mem_alloc_test(int32_t dsp_id)
{
int32_t ret = 0;
uint64_t usize = 64 * 1024;
int64_t hbmem_flags = HB_MEM_USAGE_CPU_READ_OFTEN | HB_MEM_USAGE_CPU_WRITE_OFTEN;
uint64_t p_va=0;
uint64_t p_iova=0;
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_vdsp_mem_alloc(dsp_id, usize, hbmem_flags, &p_va, &p_iova);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_mem_alloc ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_mem_free(dsp_id, p_va);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_mem_free ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
return ret;
}
hb_vdsp_mem_free
【函数声明】
int32_t hb_vdsp_mem_free(int32_t dsp_id, uint64_t va);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] va:使用libhbmem申请内存的虚拟地址
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
通过libvdsp解映射vdsp设备地址并释放内存
【示例代码】
hb_vdsp_mmu_map
【函数声明】
int32_t hb_vdsp_mmu_map(int32_t dsp_id, uint64_t va, uint64_t size, uint64_t *iova);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] va:使用libhbmem申请内存的虚拟地址
- [IN] size:待映射的内存大小
- [OUT] iova:映射成的vdsp设备地址
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
通过libvdsp映射虚拟地址为vdsp可访问的设备地址;map支持对同一个地址进行多次映射,map、unmap需要成对使用,输入参数va、size指定的区间需要确保不超过buffer分配的实际大小
【映射内存为设备地址 示例代码】
#include <hb_vdsp_mgr.h>
int32_t boot_lib_mem_map_test(int32_t dsp_id)
{
int32_t ret = 0;
int64_t flags = HB_MEM_USAGE_CPU_READ_OFTEN | HB_MEM_USAGE_CPU_WRITE_OFTEN;
hb_mem_common_buf_t com_buf = {0, };
hb_mem_common_buf_t info = {0, };
uint64_t usize = 64 * 1024;
uint64_t p_iova=0;
ret = hb_mem_module_open();
if (ret != 0) {
printf("%s dsp%d hb_mem_module_open ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
ret = hb_mem_alloc_com_buf(usize, flags, &com_buf);
if (ret != 0) {
printf("%s dsp%d hb_mem_alloc_com_buf ret-%d fail !\n", __func__, dsp_id, ret);
hb_mem_module_close();
return ret;
}
if (com_buf.fd < 0) {
printf("%s dsp%d com_buf.fd %d fail !\n", __func__, dsp_id, com_buf.fd);
hb_mem_module_close();
return ret;
}
ret = hb_mem_get_com_buf(com_buf.fd, &info);
if (ret != 0) {
printf("%s dsp%d hb_mem_get_com_buf ret-%d fail !\n", __func__, dsp_id, ret);
hb_mem_free_buf(com_buf.fd);
hb_mem_module_close();
return ret;
}
ret = hb_vdsp_init(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_init ret-%d fail !\n", __func__, dsp_id, ret);
hb_mem_free_buf(com_buf.fd);
hb_mem_module_close();
return ret;
}
ret = hb_vdsp_mmu_map(dsp_id, (uint64_t)com_buf.virt_addr, usize, &p_iova);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_mmu_map ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
hb_mem_free_buf(com_buf.fd);
hb_mem_module_close();
return ret;
}
ret = hb_vdsp_mmu_unmap(g_i_vdsp_id, (uint64_t)com_buf.virt_addr);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_mmu_unmap ret-%d fail !\n", __func__, dsp_id, ret);
hb_vdsp_deinit(dsp_id);
hb_mem_free_buf(com_buf.fd);
hb_mem_module_close();
return ret;
}
ret = hb_vdsp_deinit(dsp_id);
if (ret != HB_VDSP_OK) {
printf("%s dsp%d hb_vdsp_deinit ret-%d fail !\n", __func__, dsp_id, ret);
hb_mem_free_buf(com_buf.fd);
hb_mem_module_close();
return ret;
}
ret = hb_mem_free_buf(com_buf.fd);
if (ret != 0) {
printf("%s dsp%d hb_mem_free_buf ret-%d fail !\n", __func__, dsp_id, ret);
hb_mem_module_close();
return ret;
}
ret = hb_mem_module_close();
if (ret != 0) {
printf("%s dsp%d hb_mem_module_close ret-%d fail !\n", __func__, dsp_id, ret);
return ret;
}
return ret;
}
hb_vdsp_mmu_unmap
【函数声明】
int32_t hb_vdsp_mmu_unmap(int32_t dsp_id, uint64_t va);
【参数描述】
- [IN] dsp_id:dsp编号,取值0、1, 对应dsp0、dsp1
- [IN] va:使用libhbmem申请内存的虚拟地址
【返回值】
- 成功:0
- 失败:异常为负值错误码,参考 VDSP启停控制 API 返回值
【功能描述】
通过libvdsp解映射vdsp设备地址
【示例代码】