Stereo OCC Algorithm
Feature Introduction
Digua Stereo OCC Algorithm subscribes to binocular images, performs inference using the BPU, and publishes occupancy grid information.
Stereo OCC algorithm code repository: https://github.com/D-Robotics/dstereo_occnet
ZED camera code repository: https://github.com/D-Robotics/hobot_zed_cam
Supported Platforms
| Platform | OS Support | Example Features |
|---|---|---|
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | Launch binocular camera, display binocular images via web, and visualize occupancy grids in rviz2 |
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) | Launch binocular camera, display binocular images via web, and visualize occupancy grids in rviz2 |
Algorithm Details
| Model | Platform | Input Size | Inference FPS |
|---|---|---|---|
| DStereoOccNet | X5 | 2x3x352x640 | 6 |
| DStereoOccNet | S100 | 2x3x352x640 | 45 |
Prerequisites
RDK Platform
- RDK has been flashed with Ubuntu 22.04 system image.
- TogetheROS.Bot has been successfully installed on the RDK.
- For real-time online inference, only ZED-2i cameras are currently supported. For offline inference, please prepare rectified binocular image data.
- Ensure your PC can access the RDK over the network.
System and Package Versions
| Version Requirement | Verification Command | |
|---|---|---|
| RDK X5 System Image | v3.3.1 or later | cat /etc/version |
| RDK S100 System Image | v4.0.2-Beta or later | cat /etc/version |
| dstereo_occnet Package | v1.0.1 or later | apt list | grep tros-humble-dstereo-occnet/ |
| hobot_zed_cam | v2.3.3 or later | apt list | grep tros-humble-hobot-zed-cam/ |
Usage Guide
1. Using ZED-2i Camera
- Requires the
hobot_zed_campackage. - Execute the following commands on the RDK (supported on both X5 and S100):
# Source the TogetheROS.Bot Humble environment
source /opt/tros/humble/setup.bash
# Launch ZED-2i camera and occupancy network inference node
ros2 launch dstereo_occnet zed2i_occ_node.launch.py
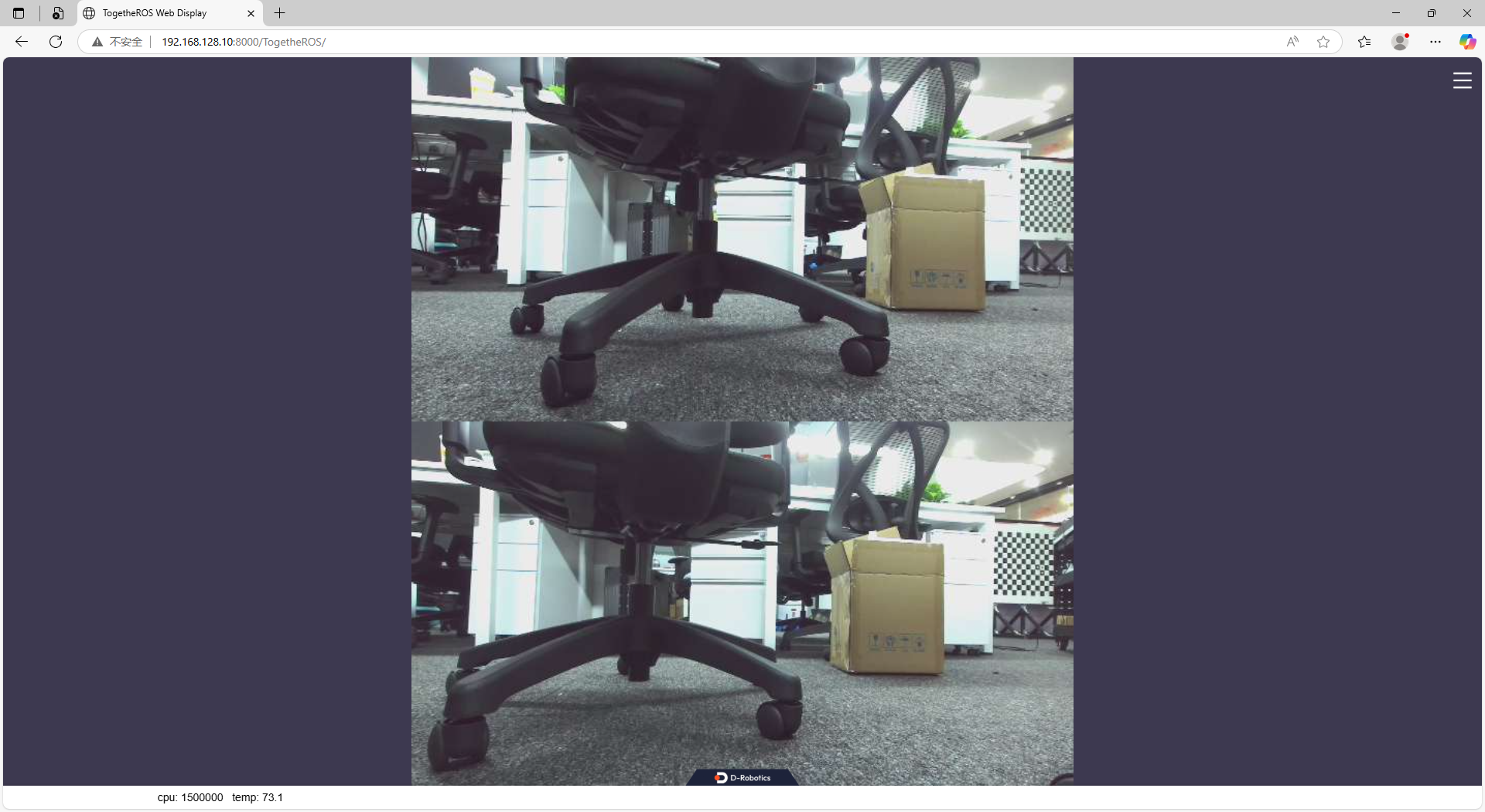
- After launching, you can view the binocular images published by ZED-2i through a web browser. Open
http://<ip>:8000in your PC's browser, where<ip>is the RDK board's IP address (e.g.,192.168.128.10). Ensure network connectivity between your PC and the RDK.
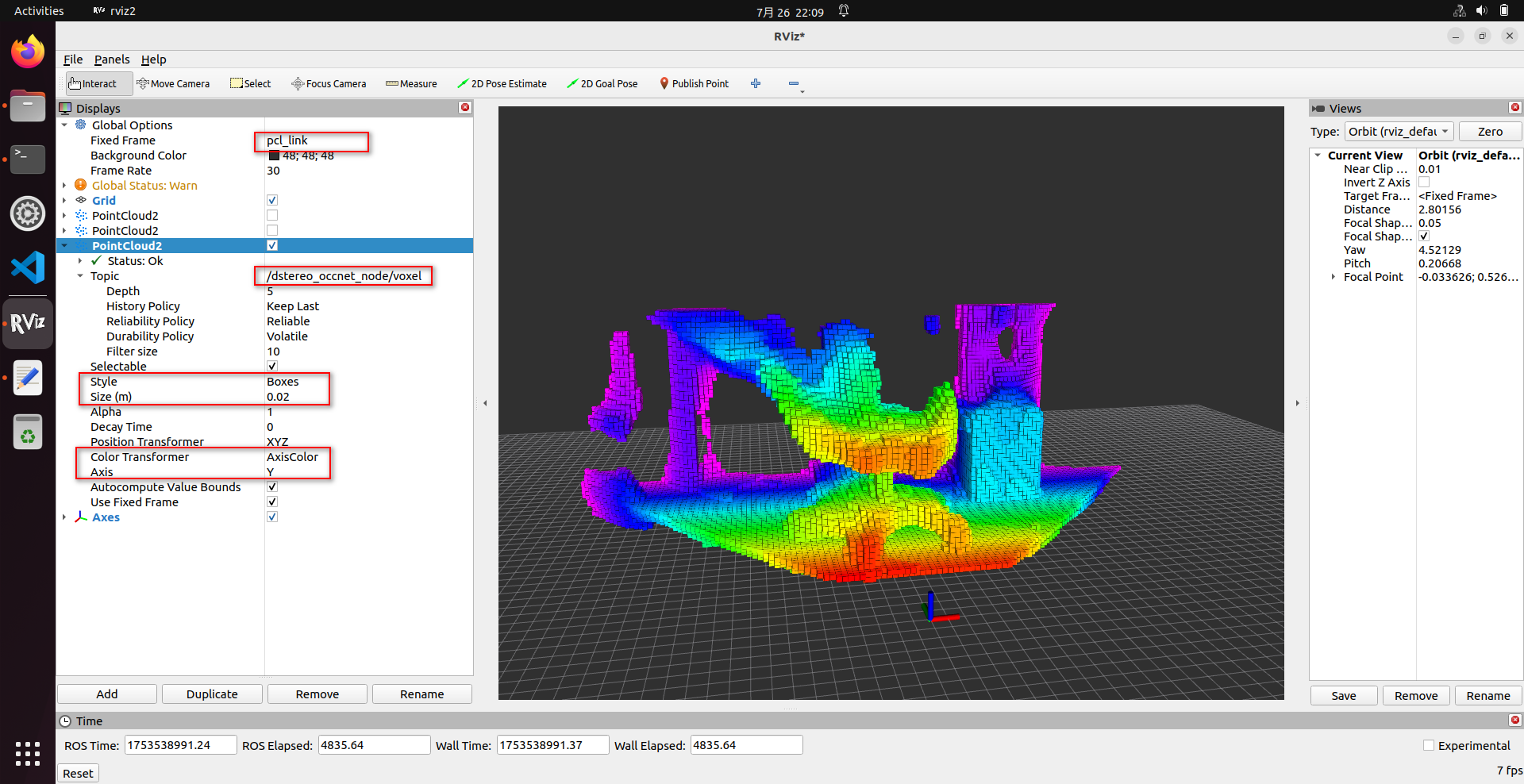
- You can also visualize the occupancy grid using rviz2. Install and launch rviz2 directly on the RDK as follows:
# Install rviz2
sudo apt install ros-humble-rviz2
# Launch rviz2
source /opt/tros/humble/setup.bash
rviz2
- To save results, add the following parameters:
save_occ_flag: Enable saving results.save_occ_dir: Specify the directory to save results (automatically created if it doesn't exist).save_freq: Set saving frequency (e.g., 4 means saving every 4 frames).save_total: Set total number of frames to save (e.g., 10);-1means save indefinitely.
# Source the TogetheROS.Bot Humble environment
source /opt/tros/humble/setup.bash
# Launch ZED-2i camera and occupancy network inference node with saving enabled
ros2 launch dstereo_occnet zed2i_occ_node.launch.py \
save_occ_flag:=True save_occ_dir:=./occ_result save_freq:=4 save_total:=10
2. Offline Inference with Custom Data
- Prepare offline data and upload it to the RDK. The data must meet the following requirements:
- The directory must contain left and right images.
- Left image filenames must include the substring
left(format: PNG or JPG). - Right image filenames must include the substring
right, with the same format as the left image.
- Left image filenames must include the substring
- Image resolution must be
640×352. Other resolutions are not supported. - Images must be rectified to achieve epipolar alignment.
- Since the model was trained using ZED-2i data, try to match the intrinsic parameters of ZED-2i as closely as possible:
- ZED-2i camera parameters:
fx=354.9999, fy=354.9999, cx=322.9469, cy=176.2076, baseline=0.12
- ZED-2i camera parameters:
- The directory must contain left and right images.

- Run the following command on the RDK (supported on both X5 and S100):
local_image_dir: Specifies the directory containing offline images.save_occ_flag: Enables result saving.save_occ_dir: Specifies the output directory (automatically created if it doesn't exist).
ros2 launch dstereo_occnet offline_infer_web_visual.launch.py \
local_image_dir:=./offline_images save_occ_flag:=True save_occ_dir:=./offline_result
- After launching, you can view the binocular images via a web browser and visualize the occupancy grid using rviz2, just like in the online case.
Package Description
Parameters
| Name | Default Value | Description |
|---|---|---|
| stereo_msg_topic | /image_combine_raw | Topic name for subscribed binocular images |
| camera_info_topic | /image_combine_raw/camera_info | Topic name for subscribed camera intrinsics |
| occ_model_file_path | X5-OCC-32x64x96x2_constinput_modified.bin | Path to the binocular occupancy network model |
| use_local_image | False | Whether to use offline inference |
| local_image_dir | config | Directory containing offline images for inference |
| save_occ_flag | False | Whether to save inference results |
| save_occ_dir | ./occ_results | Directory to save inference results |
| save_freq | 1 | Saving frequency (e.g., 4 = save every 4 frames; default = every frame) |
| save_total | -1 | Total number of frames to save (e.g., 10); -1 = save indefinitely |
| voxel_size | 0.02 | Size of each occupancy voxel in meters (0.02 = 2×2×2 cm per voxel) |
| log_level | INFO | Logging level (default: INFO) |
Subscribed Topics
| Topic Name | Message Type | Description |
|---|---|---|
/image_combine_raw | sensor_msgs::msg::Image | Subscribes to binocular images in NV12 format, arranged vertically (left image on top, right image on bottom). Configurable via stereo_msg_topic. |
/image_combine_raw/camera_info | sensor_msgs::msg::CameraInfo | Subscribes to camera intrinsics (optional). If available, camera parameters will be saved along with results. |
Published Topics
| Name | Message Type | Description |
|---|---|---|
/dstereo_occnet_node/voxel | sensor_msgs::msg::PointCloud2 | Publishes occupancy grid data for visualization in rviz2 |