Human Detection and Tracking (Ultralytics YOLO Pose)
Overview
This example uses yolo-pose for human detection and tracking. The algorithm subscribes to image topics, performs inference using the BPU, and publishes messages containing human bounding boxes and keypoint detection results. Multi-target tracking (MOT) is also supported to track detected objects.
The supported detection categories and their corresponding data types in the algorithm messages are as follows:
| Category | Description | Data Type |
|---|---|---|
| body | Human bounding box | Roi |
| body_kps | Human keypoints | Point |
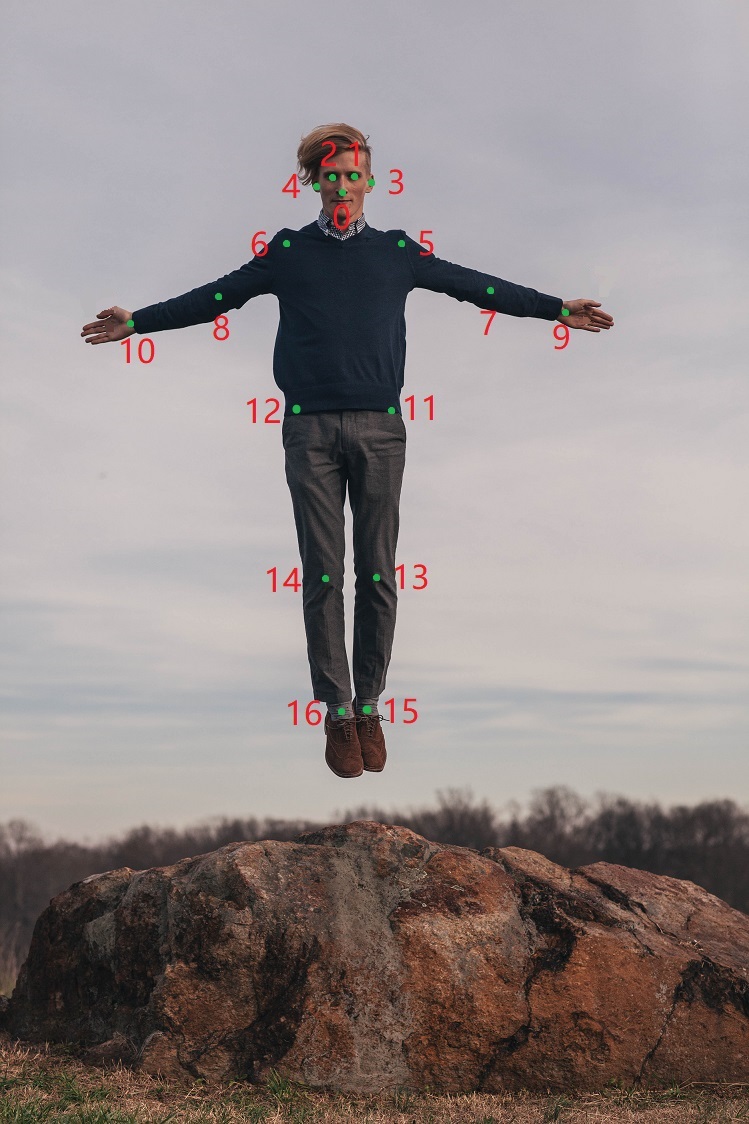
The keypoint index mapping is shown below:
Code repository: https://github.com/D-Robotics/mono2d_body_detection
Application scenarios: Human detection and tracking algorithms are essential for visual analysis of human motion, enabling pose analysis and people counting. They are mainly used in human-computer interaction, gaming, and entertainment.
Pose detection example: 4.3. Pose Detection
Robot following example: 4.4. Robot Human Following
Game character control using pose and gesture recognition: Play with X3Pi, Fitness and Gaming Combined
Supported Platforms
| Platform | OS/ROS Version | Example Functionality |
|---|---|---|
| RDK S100 | Ubuntu 22.04 (Humble) | Start MIPI/USB camera and display inference results on Web |
Preparation
RDK Platform
-
RDK is flashed with Ubuntu 22.04 system image.
-
TogetheROS.Bot is installed on RDK.
-
MIPI or USB camera is connected to RDK.
-
Ensure the PC can access the RDK via network.
Usage
The human detection and tracking (mono2d_body_detection) package subscribes to images published by the sensor package, performs inference, and publishes algorithm messages. The results can be visualized in a browser via the websocket package.
RDK Platform
Using MIPI Camera
source /opt/tros/humble/setup.bash
# Copy the required config files from the installation path.
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
# Set camera type to MIPI
export CAM_TYPE=mipi
# Launch the example
ros2 launch mono2d_body_detection mono2d_body_detection.launch.py kps_model_type:=1 kps_image_width:=640 kps_image_height:=640 kps_model_file_name:=config/yolo11x_pose_nashe_640x640_nv12.hbm
Using USB Camera
source /opt/tros/humble/setup.bash
# Copy the required config files from the installation path.
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
# Set camera type to USB
export CAM_TYPE=usb
# Launch the example
ros2 launch mono2d_body_detection mono2d_body_detection.launch.py kps_model_type:=1 kps_image_width:=640 kps_image_height:=640 kps_model_file_name:=config/yolo11x_pose_nashe_640x640_nv12.hbm
Using Local Image Playback
source /opt/tros/humble/setup.bash
# Copy the required config files from the installation path.
cp -r /opt/tros/${TROS_DISTRO}/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/${TROS_DISTRO}/lib/dnn_node_example/config/ .
# Set camera type to framebuffer (local image)
export CAM_TYPE=fb
# Launch the example
ros2 launch mono2d_body_detection mono2d_body_detection.launch.py publish_image_source:=config/person_body.jpg publish_image_format:=jpg kps_model_type:=1 kps_image_width:=640 kps_image_height:=640 kps_model_file_name:=config/yolo11x_pose_nashe_640x640_nv12.hbm
Result Analysis
The following output indicates successful operation:
[mono2d_body_detection-3] [WARN] [1660219823.214730286] [example]: This is mono2d body det example!
[mono2d_body_detection-3] [WARN] [1747724998.166714029] [mono2d_body_det]: Parameter:
[mono2d_body_detection-3] is_sync_mode_: 0
[mono2d_body_detection-3] model_file_name_: config/yolo11x_pose_nashe_640x640_nv12.hbm
[mono2d_body_detection-3] is_shared_mem_sub: 1
[mono2d_body_detection-3] ai_msg_pub_topic_name: /hobot_mono2d_body_detection
[mono2d_body_detection-3] ros_img_topic_name: /image_raw
[mono2d_body_detection-3] image_gap: 1
[mono2d_body_detection-3] dump_render_img: 0
[mono2d_body_detection-3] model_type: 1
[mono2d_body_detection-3] [BPU][[BPU_MONITOR]][281473010090784][INFO]BPULib verison(2, 1, 2)[0d3f195]!
[mono2d_body_detection-3] [DNN] HBTL_EXT_DNN log level:6
[mono2d_body_detection-3] [DNN]: 3.3.3_(4.1.17 HBRT)
[mono2d_body_detection-3] [WARN] [1747724998.912552895] [mono2d_body_det]: Get model name: yolo11x_pose_nashe_640x640_nv12 from load model.
[mono2d_body_detection-3] [WARN] [1747724998.916663825] [mono2d_body_det]: Enabling zero-copy
[mono2d_body_detection-3] [WARN] [1747724998.916748774] [mono2d_body_det]: Create hbmem_subscription with topic_name: /hbmem_img
[mono2d_body_detection-3] [WARN] [1660219824.895102286] [mono2d_body_det]: input fps: 31.34, out fps: 31.22
[mono2d_body_detection-3] [WARN] [1660219825.921873870] [mono2d_body_det]: input fps: 30.16, out fps: 30.21
[mono2d_body_detection-3] [WARN] [1660219826.922075496] [mono2d_body_det]: input fps: 30.16, out fps: 30.00
[mono2d_body_detection-3] [WARN] [1660219827.955463330] [mono2d_body_det]: input fps: 30.01, out fps: 30.01
[mono2d_body_detection-3] [WARN] [1660219828.955764872] [mono2d_body_det]: input fps: 30.01, out fps: 30.00
The log shows the program is running successfully, with inference input and output at 30fps, and frame rate statistics updated every second.
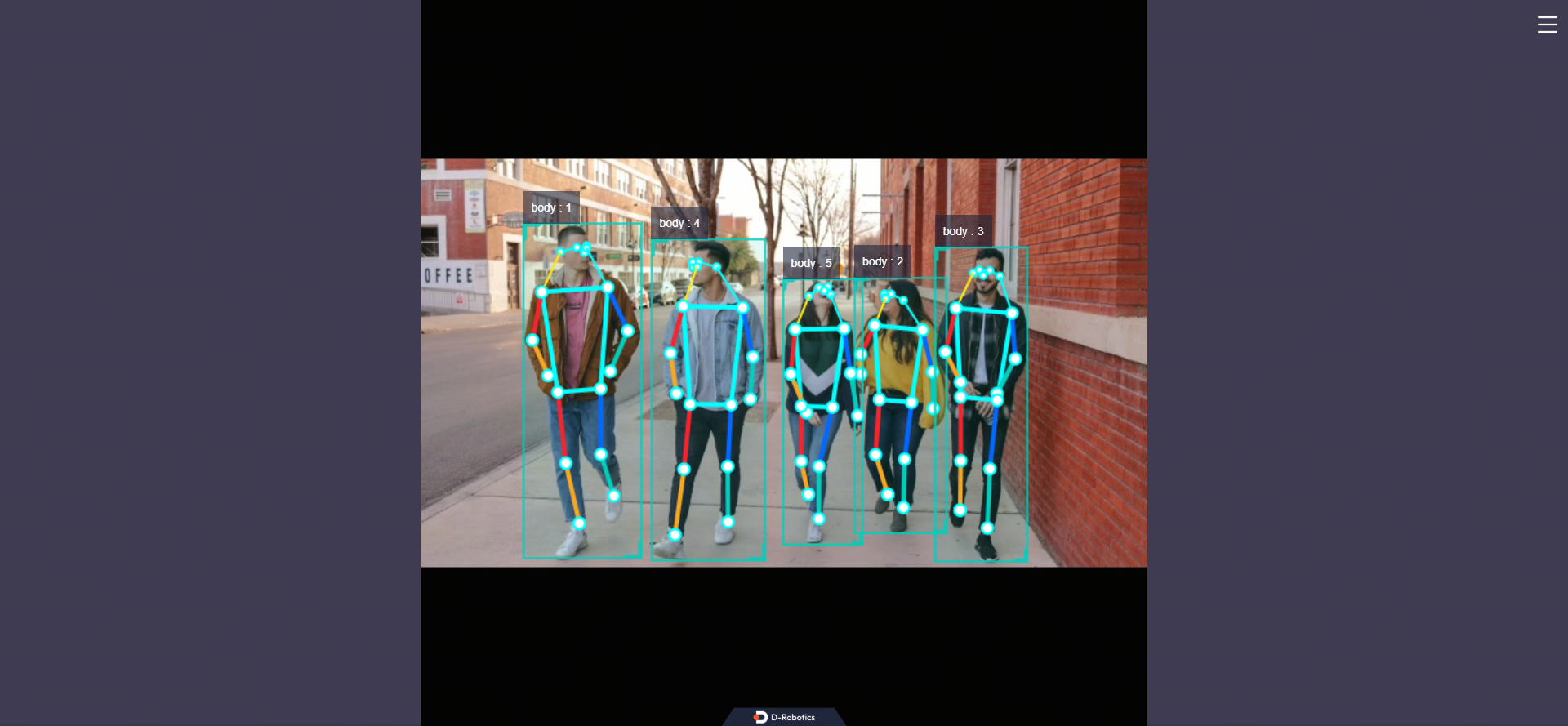
Open http://IP:8000 in your browser (replace IP with the RDK/X86 device IP address) to view the rendered images and algorithm results (human, head, face, hand detection boxes, box types, tracking IDs, and keypoints):