Stereo OCC Algorithm
Function Introduction
The Stereo OCC Algorithm subscribes to stereo images, uses the BPU for algorithm inference, and publishes occupancy grid information.
Code Repository: (https://github.com/D-Robotics/dstereo_occnet)
Supported Platforms
| Platform | Runtime Environment | Example Function |
|---|---|---|
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | Launch stereo camera, display stereo images via Web, show occupancy grid results in rviz2 |
Preparation
RDK Platform
-
RDK has been flashed with Ubuntu 22.04 system image.
-
RDK has successfully installed TogetheROS.Bot.
-
For real-time online inference, currently only supports ZED-2i camera; for offline inference, please prepare stereo images.
-
Confirm that the PC can access the RDK through the network.
Version Requirements
| Version | Query Method | |
|---|---|---|
| System Version | 3.2.3 | Execute on RDK X5 board: cat /etc/version |
| dstereo_occnet package version | 1.0.0 | Execute on RDK X5 board: apt list | grep tros-humble-dstereo-occnet/ |
| hobot_zed_cam package version | 2.3.3 | Execute on RDK X5 board: apt list | grep tros-humble-hobot-zed-cam/ |
Usage Instructions
1. Using with ZED-2i Camera
- Need to use together with the
hobot_zed_campackage - Execute the following commands on RDK X5:
# Configure tros.b humble environment
source /opt/tros/humble/setup.bash
# Launch ZED-2i camera and occupancy network inference program
ros2 launch dstereo_occnet zed2i_occ_node.launch.py
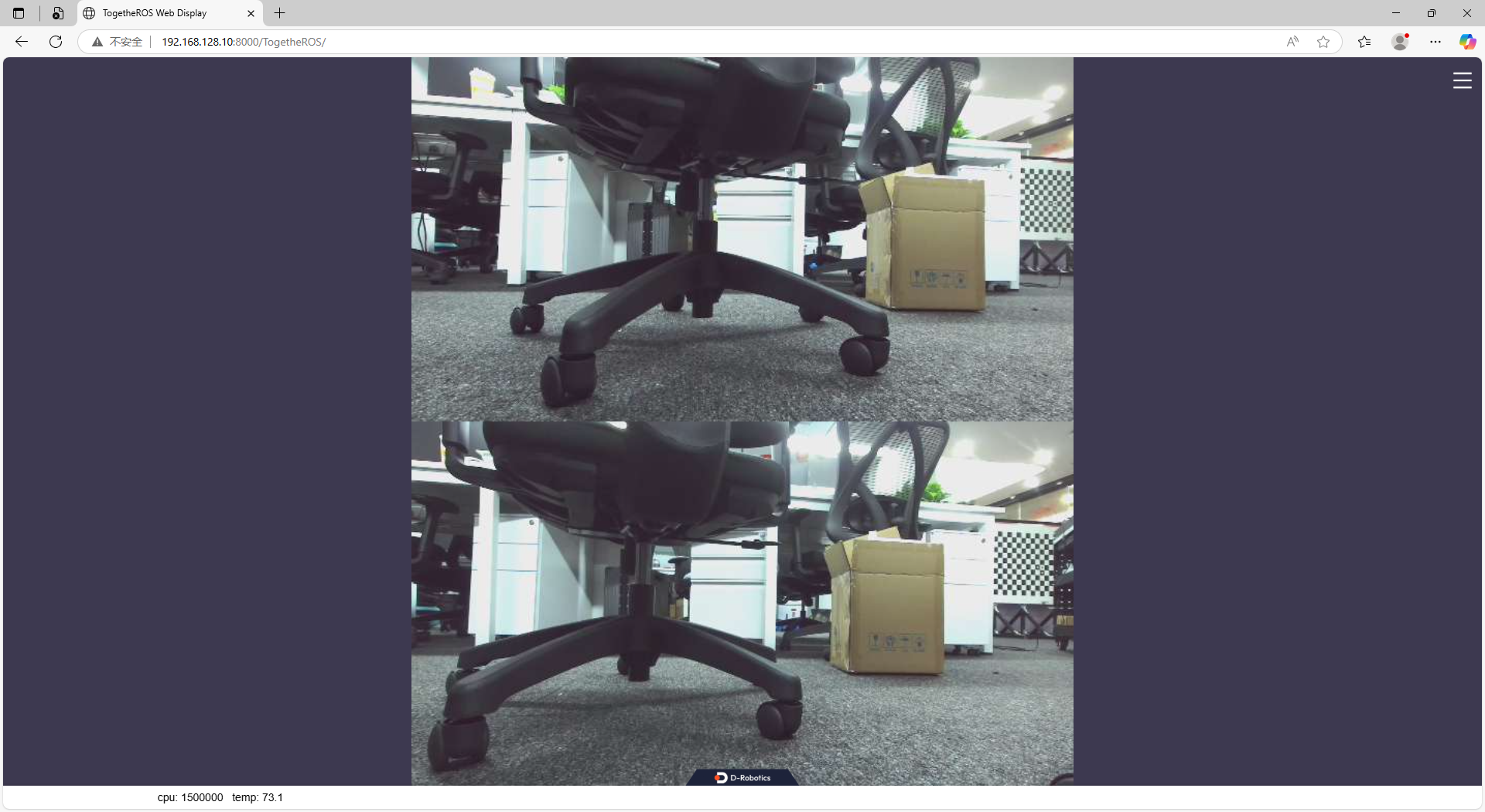
After the program starts, you can view the stereo images published by ZED-2i through the web page and view the occupancy grid through rviz2.
To view stereo images through web, enter http://ip:8000 in the PC browser to view the stereo images. The ip is the ip of the RDK X5 board, which is 192.168.128.10 in the example. Make sure the PC and RDK X5 can communicate through the network.
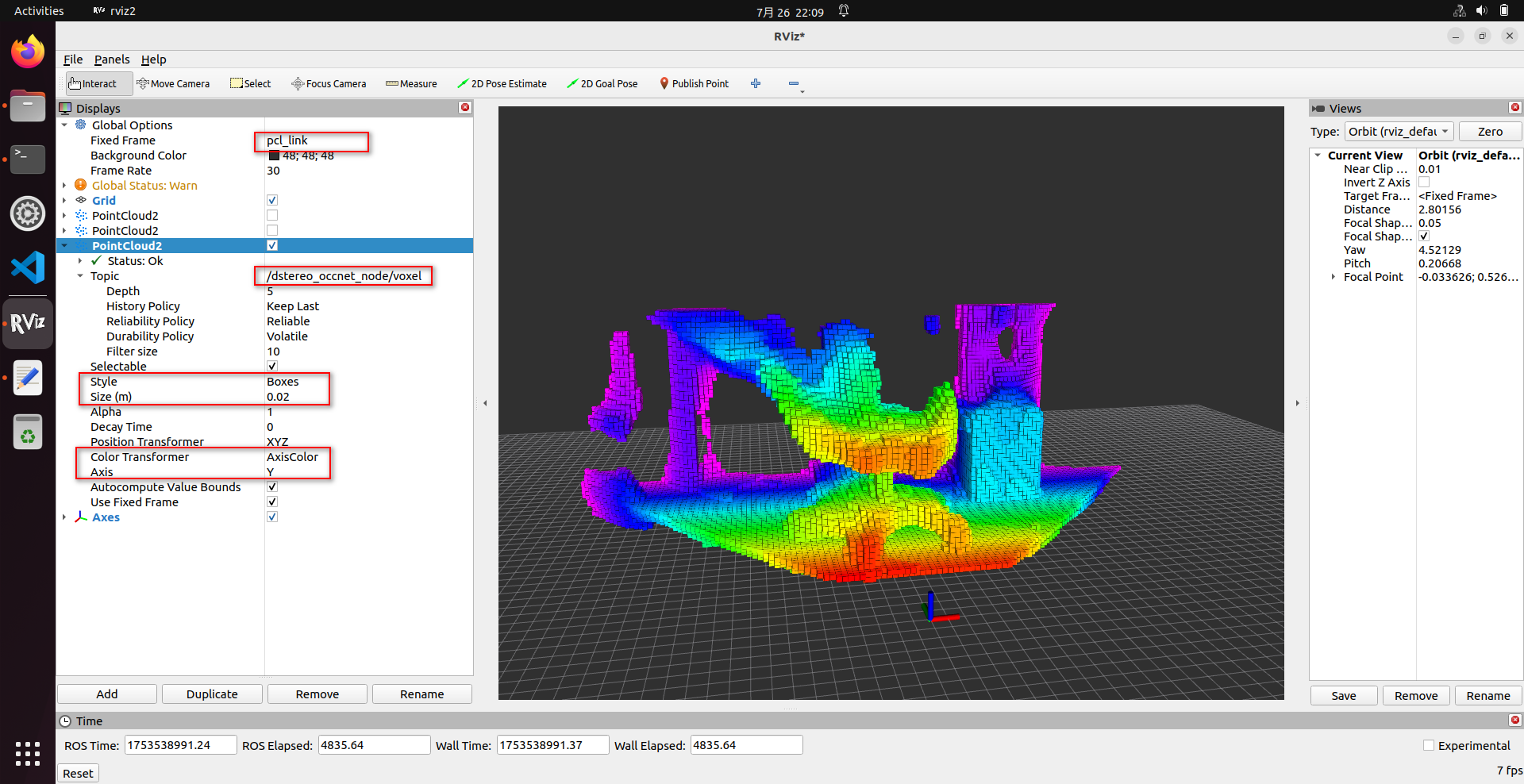
You can view the occupancy grid through rviz2. You need to set up an Ubuntu22.04 + ROS2 Humble host computer, and the host computer and RDK X5 board can communicate through ROS2, then start rviz2. The specific settings are as follows:
- To save results, please add the following parameters:
# Configure tros.b humble environment
source /opt/tros/humble/setup.bash
# Launch ZED-2i camera and occupancy network inference program
ros2 launch dstereo_occnet zed2i_occ_node.launch.py \
save_occ_flag:=True save_occ_dir:=./occ_result save_freq:=4 save_total:=10
2. Using Custom Data for Offline Inference
-
Need to prepare offline data and upload it to the RDK X5 board. The format of offline data is as follows:
- The offline directory needs to contain left and right images. The program will make judgments. The left image needs to contain the
leftfield, in png or jpg format. The right image needs to contain therightfield, and other aspects should be consistent with the left image - Image resolution is
640*352, other resolutions are not supported - Left and right images need to be corrected to achieve epipolar alignment
- Since the model is currently trained with ZED-2i data, try to make the intrinsic parameters of offline images close to ZED-2i. ZED-2i camera parameters are:
fx=354.9999, fy=354.9999, cx=322.9469, cy=176.2076, baseline=0.12
- The offline directory needs to contain left and right images. The program will make judgments. The left image needs to contain the
-
Execute the following commands on RDK X5:
ros2 launch dstereo_occnet offline_infer_web_visual.launch.py \
local_image_dir:=./offline_images save_occ_flag:=True save_occ_dir:=./offline_result
After the program starts, you can also view the stereo images published by ZED-2i through the web page and view the occupancy grid through rviz2
Package Description
Parameters
| Name | Value | Description |
|---|---|---|
| stereo_msg_topic | Default /image_combine_raw | Name of the subscribed stereo image topic |
| camera_info_topic | Default /image_combine_raw/camera_info | Name of the subscribed camera intrinsic parameters topic |
| occ_model_file_path | Default X5-OCC-32x64x96x2_constinput_modified.bin | Path of the stereo occupancy network model |
| use_local_image | Default False | Whether to use offline inference |
| local_image_dir | Default config | Directory for storing images in offline inference |
| save_occ_flag | Default False | Whether to save inference results |
| save_occ_dir | Default ./occ_results | Directory for saving inference results |
| save_freq | Default 1 | Save frequency, e.g., setting to 4 means saving once every 4 frames, default saves every frame inference result |
| save_total | Default -1 | Total number of saves, e.g., setting to 10 means saving 10 frame results in total, -1 means save continuously |
| voxel_size | Default 0.02 | Size of each occupancy grid, unit m, 0.02 means each occupancy grid is 2*2*2cm |
| log_level | Default INFO | Log level, default INFO |
Subscribed Topics
| Topic Name | Message Type | Description |
|---|---|---|
| /image_combine_raw | sensor_msgs::msg::Image | Subscribe to stereo images, image format is NV12, images are required to be arranged vertically with left image on top and right image at bottom, can be modified through stereo_msg_topic parameter |
| /image_combine_raw/camera_info | sensor_msgs::msg::CameraInfo | Subscribe to camera intrinsic parameters, optional, this topic may not exist, if it exists, camera parameters can be saved together when saving results |
Published Topics
| Name | Message Type | Description |
|---|---|---|
| /dstereo_occnet_node/voxel | sensor_msgs::msg::PointCloud2 | Published occupancy grid data, can be displayed using rviz2 |