Ultralytics YOLOv8-Seg
功能介绍
Ultralytics YOLOv8-Seg实例分割算法示例使用图片作为输入,利用BPU进行算法推理,发布包含检测和分割结果msg。
YOLOv8-Seg是使用COCO128-seg数据集训练出来的Onnx模型,模型来源: https://github.com/D-Robotics/hobot_model 。 支持对人、动物、水果、交通工具等共80种类型进行实例分割。
代码仓库: https://github.com/D-Robotics/hobot_dnn
应用场景:YOLOv8-Seg能够识别图像中的单个物体并对其进行精确分割。这种技术可以应用在自动驾驶、遥感图像分析、医疗影像分析等领域。
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | · 启动MIPI/USB摄像头/本地回灌,渲染结果保存在本地 |
| RDK S100, RDK S100P | Ubuntu 22.04 (Humble) | · 启动MIPI/USB摄像头/本地回灌,渲染结果保存在本地 |
算法信息
| 模型 | 平台 | 输入尺寸 | 推理帧率(fps) |
|---|---|---|---|
| yolov8n_seg | X5 | 1x3x640x640 | 126.64 |
| yolov8n_seg | S100 | 1x3x640x640 | 443.39 |
准备工作
RDK平台
-
RDK已烧录好Ubuntu 22.04系统镜像。
-
RDK已成功安装TogetheROS.Bot。
-
RDK已安装MIPI或者USB摄像头,无摄像头的情况下通过回灌本地JPEG/PNG格式图片的方式体验算法效果。
使用介绍
RDK平台
使用摄像头发布图片
使用MIPI摄像��头发布图片
YOLOv8-Seg实例分割示例订阅sensor package发布的图片, 经过推理后发布算法msg。默认不保存渲染图片, 如需保存, 需要在运行时设置 dnn_example_dump_render_img 为1, 会在运行路径下自动保存渲染后的图片,命名方式为render_frameid_时间戳秒_时间戳纳秒.jpg。
- Humble
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_dump_render_img:=0 dnn_example_config_file:=config/yolov8segworkconfig.json dnn_example_image_width:=1920 dnn_example_image_height:=1080
使用USB摄像头发布图片
- Humble
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_dump_render_img:=0 dnn_example_config_file:=config/yolov8segworkconfig.json dnn_example_image_width:=1920 dnn_example_image_height:=1080
使用本地图片回灌
YOLOv8-Seg分割示例使用本地JPEG/PNG格式图片回灌,经过推理后将算法结果渲染后的图片存储在本地的运行路径下。
- Humble
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 启动launch文件
ros2 launch dnn_node_example dnn_node_example_feedback.launch.py dnn_example_config_file:=config/yolov8segworkconfig.json dnn_example_image:=config/test.jpg
结果分析
使用摄像头发布图片
在运行终端输出如下信息:
[example-3] [WARN] [0000001244.489045384] [example]: Sub img fps: -1.00, Smart fps: 6.00, infer time ms: 12, post process time ms: 31
[example-3] [WARN] [0000001245.524813052] [example]: Sub img fps: 5.84, Smart fps: 4.99, infer time ms: 8, post process time ms: 64
[example-3] [WARN] [0000001246.526635344] [example]: Sub img fps: 4.96, Smart fps: 5.00, infer time ms: 8, post process time ms: 66
[example-3] [WARN] [0000001247.528846136] [example]: Sub img fps: 5.00, Smart fps: 5.00, infer time ms: 8, post process time ms: 68
[example-3] [WARN] [0000001248.528474095] [example]: Sub img fps: 5.00, Smart fps: 5.00, infer time ms: 8, post process time ms: 68
[example-3] [WARN] [0000001249.528576345] [example]: Sub img fps: 5.00, Smart fps: 5.00, infer time ms: 8, post process time ms: 68
[example-3] [WARN] [0000001250.493265846] [example]: Sub img fps: 5.02, Smart fps: 5.00, infer time ms: 8, post process time ms: 32
[example-3] [WARN] [0000001251.528909346] [example]: Sub img fps: 4.98, Smart fps: 5.00, infer time ms: 8, post process time ms: 67
输出log显示,发布算法推理结果的topic为hobot_dnn_detection,订阅图片的topic为/hbmem_img,其中图片发布的帧率根据会根据算法推理输出帧率自适应。此外,RDK上会渲染实例分割结果并存储图片在运行路径下,会使帧率下降。
原始图片:

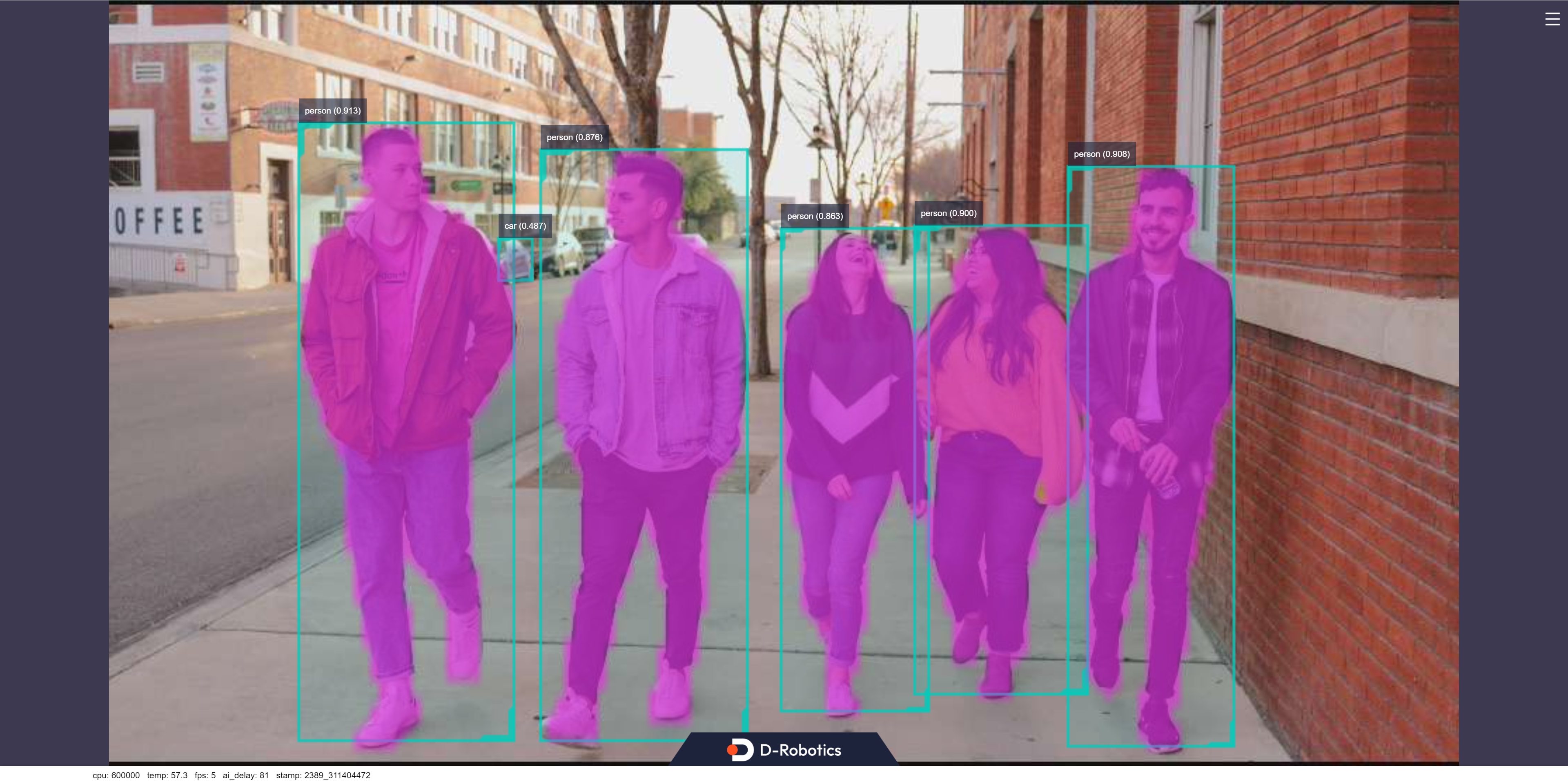
渲染后的图片:
使用本地图片回灌
在运行终端输出如下信息:
[INFO] [0000001744.811779665] [example]: Dnn node feed with local image: /userdata/config/test.jpg
[INFO] [0000001746.237111249] [example]: Output from frame_id: feedback, stamp: 0.0
[INFO] [0000001746.266157040] [PostProcessBase]: out box size: 6
[INFO] [0000001746.266340040] [PostProcessBase]: det rect: 90.4946 58.2675 192.103 351.403, det type: person, score:0.927177
[INFO] [0000001746.267129832] [PostProcessBase]: det rect: 455.518 77.1254 536.289 354.541, det type: person, score:0.909735
[INFO] [0000001746.267248457] [PostProcessBase]: det rect: 381.604 103.953 464.446 327.9, det type: person, score:0.898899
[INFO] [0000001746.267331624] [PostProcessBase]: det rect: 204.864 71.6262 303.593 351.835, det type: person, score:0.887814
[INFO] [0000001746.267404540] [PostProcessBase]: det rect: 317.885 108.287 389.773 338.197, det type: person, score:0.866887
[INFO] [0000001746.267486457] [PostProcessBase]: det rect: 181.487 111.093 202.097 132.665, det type: car, score:0.443035
[INFO] [0000001746.267548999] [ClassificationPostProcess]: out cls size: 0
[INFO] [0000001746.267662832] [SegmentationPostProcess]: features size: 14240, width: 160, height: 89, num_classes: 80, step: 1
[INFO] [0000001746.270546040] [ImageUtils]: target size: 7
[INFO] [0000001746.270674082] [ImageUtils]: target type: person, rois.size: 1
[INFO] [0000001746.270745915] [ImageUtils]: roi.type: person, x_offset: 90 y_offset: 58 width: 101 height: 293
[INFO] [0000001746.271122207] [ImageUtils]: target type: person, rois.size: 1
[INFO] [0000001746.271162499] [ImageUtils]: roi.type: person, x_offset: 455 y_offset: 77 width: 80 height: 277
[INFO] [0000001746.271325499] [ImageUtils]: target type: person, rois.size: 1
[INFO] [0000001746.271362082] [ImageUtils]: roi.type: person, x_offset: 381 y_offset: 103 width: 82 height: 223
[INFO] [0000001746.271491040] [ImageUtils]: target type: person, rois.size: 1
[INFO] [0000001746.271525249] [ImageUtils]: roi.type: person, x_offset: 204 y_offset: 71 width: 98 height: 280
[INFO] [0000001746.271782749] [ImageUtils]: target type: person, rois.size: 1
[INFO] [0000001746.271819457] [ImageUtils]: roi.type: person, x_offset: 317 y_offset: 108 width: 71 height: 229
[INFO] [0000001746.271947790] [ImageUtils]: target type: car, rois.size: 1
[INFO] [0000001746.271982374] [ImageUtils]: roi.type: car, x_offset: 181 y_offset: 111 width: 20 height: 21
[INFO] [0000001746.272044124] [ImageUtils]: target type: parking_space, rois.size: 0
[WARN] [0000001746.276824624] [ImageUtils]: Draw result to file: render_feedback_0_0.jpeg
输出log显示,算法使用输入的图片config/test.jpeg推理,存储的渲染图片文件名为render_feedback_0_0.jpeg,渲染图片效果:
