8.6 TROS/ROS 开发
本节主要解答与地瓜机器人操作系统(TogetheROS.Bot, tros.b)以及通用ROS/ROS2在RDK平台上开发和使用相关的常见疑问。
Q1: TROS相关的软件包运行发生错误,推荐的预先排查步骤有哪些?
A:
- 确保您的tros软件包都是最新的: 许多问题可能在新版本中已被修复。在确保D-Robotics官方APT源(如
sunrise.horizon.cc或最新的archive.d-robotics.cc)配置正确后,执行以下命令更新所有tros相关的包:在提问时,也请使用sudo apt update && sudo apt upgraderdkos_info、apt list --installed | grep tros、apt show <tros_package_name>等命令提供您的系统和软件包版本信息。 - 尝试定位问题出现的ROS节点:
- 参考对应功能包的launch启动文件,将其中的日志级别(log level)参数修改为
debug(例如,在Node的arguments中添加['--ros-args', '--log-level', 'DEBUG'])。 - 重新运行launch文件,根据详细的debug日志输出来定位具体是哪个节点(node)出现了问题。
- TROS功能包的launch文件通常位于
/opt/tros/<tros_distro>/share/<package_name>/launch/目录下(例如/opt/tros/humble/share/mipi_cam/launch/)。 - ROS2的日志文件通常存储在
~/.ros/log/或/root/.ros/log/目录下。在排查前,可以先执行rm -rf ~/.ros/log/*(或对应root路径) 清空旧日志,然后重新运行功能包以收集最新的、与当前问题相关的日志。
- 参考对应功能包的launch启动文件,将其中的日志级别(log level)参数修改为
- 重新安装相关的tros功能包:
- 如果怀疑是某个tros功能包的配置文件被改乱或安装不完整,可以尝试重装该软件包。
- 以
hobot_usb_cam为例,重装步骤大致如下:- 查找精确的包名:
apt list --installed | grep hobot-usb-cam(根据实际情况调整搜索词) - 卸载软件包:
sudo apt remove <tros_package_name_found>(例如sudo apt remove tros-hobot-usb-cam) - 确保APT源配置正确并更新缓存:
sudo apt update - 重新安装软件包:
sudo apt install <tros_package_name_found>
- 查找精确的包名:
Q2: TROS和标准的ROS2有什么区别?TROS Foxy版本如何升级到TROS Humble版本?
A:
-
TROS与ROS2的关系:
- TROS (TogetheROS.Bot) 是D-Robotics基于开源的ROS2(Robot Operating System 2)针对其RDK硬件平台进行优化和适配后发布的机器人操作系统。
- 它通常基于某个ROS2的LTS(长期支持)版本进行构建,例如:
- 在RDK OS 2.x (基于Ubuntu 20.04) 上,TROS通常基于 ROS2 Foxy Fitzroy。
- 在RDK OS 3.x (基于Ubuntu 22.04) 上,TROS通常基于 ROS2 Humble Hawksbill。
- TROS在标准的ROS2基础上,集成了D-Robotics硬件(如BPU、VPU、JPU、Sensor等)的驱动、硬件加速库、以及针对机器人��常用功能的优化方案和示例。
- TROS与对应版本的标准ROS2在核心API和通信机制上是完全兼容的,这意味着为标准ROS2 Foxy/Humble开发的节点和服务通常可以直接或稍作修改后在对应版本的TROS上运行,反之亦然。它们可以相互通信。
-
TROS版本升级 (例如从Foxy到Humble):
- 由于TROS的版本与RDK OS的底层Ubuntu版本紧密绑定(例如Foxy对应Ubuntu 20.04,Humble对应Ubuntu 22.04),通常无法直接通过
apt upgrade等命令将TROS从一个大的LTS版本(如Foxy)升级到另一个大的LTS版本(如Humble)。 - 正确的升级方式是: 通过烧录包含了新版本TROS(如Humble)的、对应新Ubuntu版本(如22.04)的RDK OS完整系统镜像,来完成整个系统和TROS的升级。
- 由于TROS的版本与RDK OS的底层Ubuntu版本紧密绑定(例如Foxy对应Ubuntu 20.04,Humble对应Ubuntu 22.04),通常无法直接通过
-
板卡上的ROS2运行环境:
- RDK板卡上安装的TROS本身就是一个完整的ROS2运行环境。
- 您也可以在TROS之外,在板卡上自行安装其他标准ROS2发行版(如Foxy, Humble)或ROS1(如Noetic),它们可以与TROS共存,但如前所述,一个终端会话中只能source一个ROS环境。
colcon是ROS2常用的构建工具,如果您的系统镜像中未预装,可能需要手动安装:sudo apt update
sudo apt install python3-colcon-common-extensions python3-catkin-pkg-modules python3-rosdep
# 或者通过pip安装:
# pip3 install -U colcon-common-extensions empy
-
注意: 任何在x86平台直接编译(而非交叉编译)的ROS功能包都不能直接在ARM架构的RDK板卡上运行,反之亦然。需要确保程序是为目标平台的架构编译的。
Q3: TROS是如何安装在RDK板卡上的?是否需要手动安装?
A:
- TROS通常在您烧录官方提供的RDK OS系统镜像时,就已经内置并预装在板卡上了。您不需要在烧录完系统后再手动执行完整的TROS安装流程。
- 您可以通过APT包管理器来更新或增量安装TROS的各个功能包。在确保D-Robotics官方APT源配置正确的前提下,执行
sudo apt update && sudo apt upgrade会更新已安装的TROS包到最新版本。 - 旧版本中可能存在的
hhp工具或手动建立软链接的步骤,在新版的TROS中通常已不再需要。
Q4: TROS相关功能包的源代码在哪里可以找到?
A:
- TROS手册: D-Robotics官方的TROS用户手册中,在介绍各个核心功能包或示例时,通常会提供对应源码的GitHub仓库链接。
- NodeHub: 如果功能包是作为NodeHub(D-Robotics应用商店或组件平台)的一部分提供,其相关介绍页面通常也会包含源码链接。
- GitHub D-Robotics组织: 大部分TROS相关的开源功能包都托管在GitHub上的 D-Robotics 组织下 (https://github.com/D-Robotics)。您可以在该组织内通过搜索功能包的名称(或部分名称)来查找其源码仓库。
- README文档: 通常,每个TROS功能包的源码仓库中都会包含一个详细的
README.md文件,其中会说明该功能包的编译方法、使用说明、参数配置、依赖项等重要信息。
Q5: TROS功能包的源码编译有哪些注意事项?
A:
-
何时需要源码编译:
- 体验功能: 如果您只是想体验TROS的已有功能,通常不需要进行源码编译。直接烧录最新的RDK OS系统镜像,参考手册运行预编译好的功能包即可。
- 二次开发: 如果您需要在某个官方提供的TROS功能包基础上进行修改和二次开发,那么您需要下载该功能包��的源码,并在其基础上进行修改和编译。这种情况下,通常建议直接在RDK板卡端进行编译(如果板卡资源允许且安装了必要的编译工具),或者在配置好的交叉编译Docker环境中进行。
- 完整构建TROS: 如果您需要从零开始构建整个TROS发行版(例如,为了深度定制或移植到新的硬件平台),这是一个非常复杂的过程,通常需要使用官方提供的交叉编译Docker环境,在性能强劲的x86 Ubuntu开发机上进行。
-
交叉编译Docker环境:
- 版本对应: 确保您拉取的交叉编译Docker镜像版本与您目标TROS版本(Foxy或Humble)以及目标RDK OS版本相对应。
- 源码分支: 从GitHub等平台拉取TROS功能包源码时,请确保切换到与您的目标TROS版本对应的正确分支(例如,
foxy分支、humble分支或特定的release tag),避免直接使用main或develop等开发分支,除非您明确知道其兼容性。
-
依赖问题:
- 在源码编译过程中,可能会遇到缺少依赖库(“缺包少库”)的问题。解决这类编译依赖问题是C/C++开发者应具备的基本技能。
- 仔细阅读报错信息,确定缺少的库或头文件名称。
- 尝试使用
apt search <package_name>查找对应的Debian包,并使用sudo apt install <package_name-dev>(通常开发包带有-dev后缀)进行安装。 - 对于ROS自身的依赖,可以使用
rosdep工具来安装:sudo apt install python3-rosdep
sudo rosdep init # 只需要执行一次
rosdep update
cd <your_ros_workspace_root>
rosdep install --from-paths src --ignore-src -r -y - 社区通常无法对 индивидуальные 编译环境的依赖问题提供一对一支持。
Q6: 在RDK板卡上尝试安装标准ROS2时报错,怎么办?
A: 在RDK板卡上(可能已经预装了TROS)自行安装标准的ROS2发行版(如Foxy, Humble)时,如果遇到问题:
- 使用推荐的安装工具:
- 可以尝试使用社区中广受好评的第三方ROS安装工具,例如“小鱼的一键安装系列”(FishROS)。这些工具通常会处理好软件源配置、依赖安装等繁琐步骤。
wget http://fishros.com/install -O fishros && bash fishros
- 可以尝试使用社区中广受好评的第三方ROS安装工具,例如“小鱼的一键安装系列”(FishROS)。这些工具通常会处理好软件源配置、依赖安装等繁琐步骤。
- 从源码安装(如果工具安装失败):
- 如果一键安装工具也失败,您可以尝试从“小鱼”的GitHub仓库克隆其安装脚本的源码,并手动执行Python安装脚本。这有时能提供更详细的错误输出或允许您进行一些自定义修改。
git clone https://github.com/fishros/install
cd install
sudo python3 install.py
- 如果一键安装工具也失败,您可以尝试从“小鱼”的GitHub仓库克隆其安装脚本的源码,并手动执行Python安装脚本。这有时能提供更详细的错误输出或允许您进行一些自定义修改。
- 检查网络和软件源: 确保板卡网络连接正常,并且能够访问ROS官方的软件源(
packages.ros.org)以及Ubuntu的官方软件源。 - 查看错误日志: 仔细阅读安装过程中出现的任何错误信息,它们通常会指出问题的具体原因(如依赖冲突、下载失败、编译错误等)。
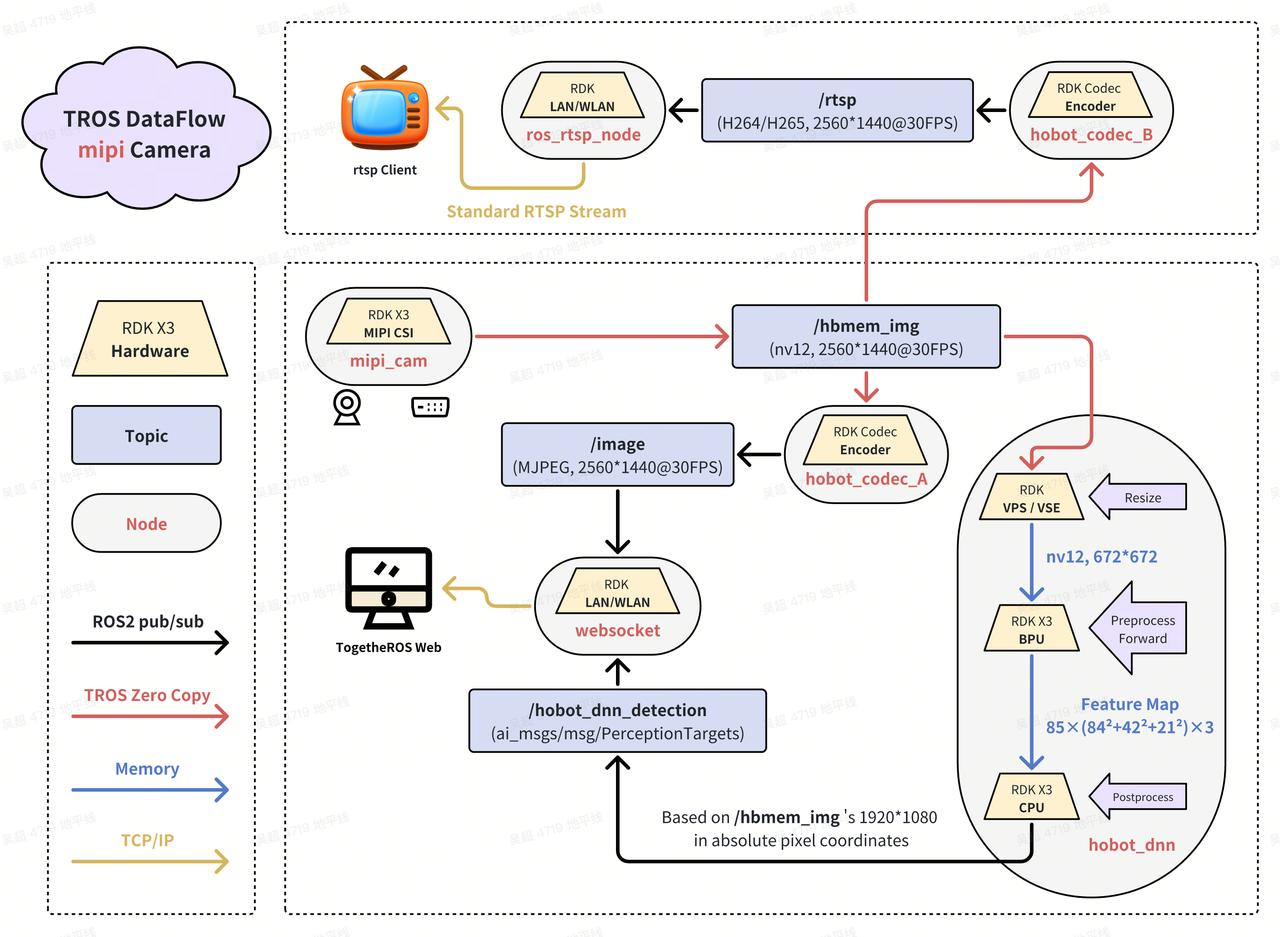
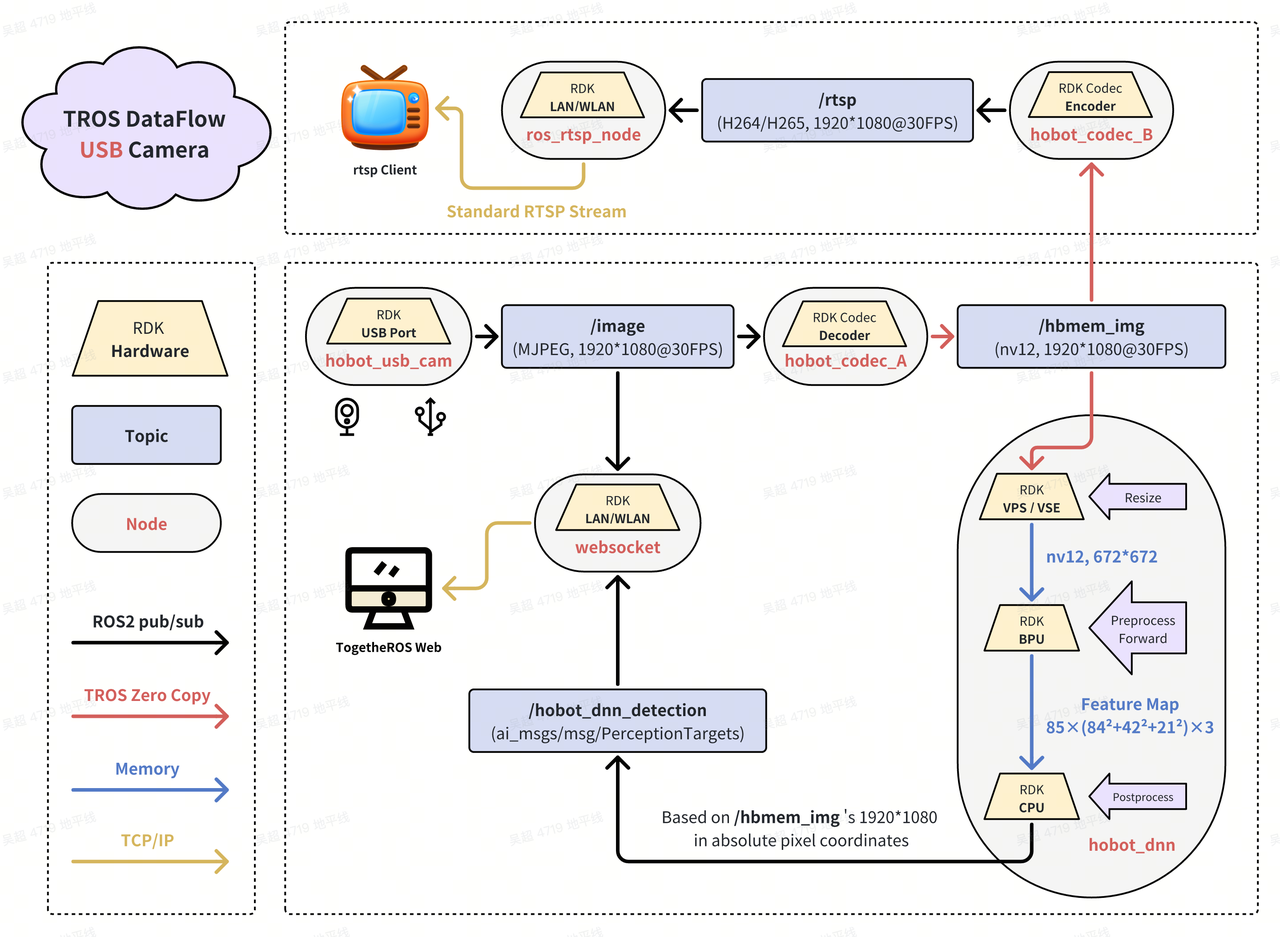
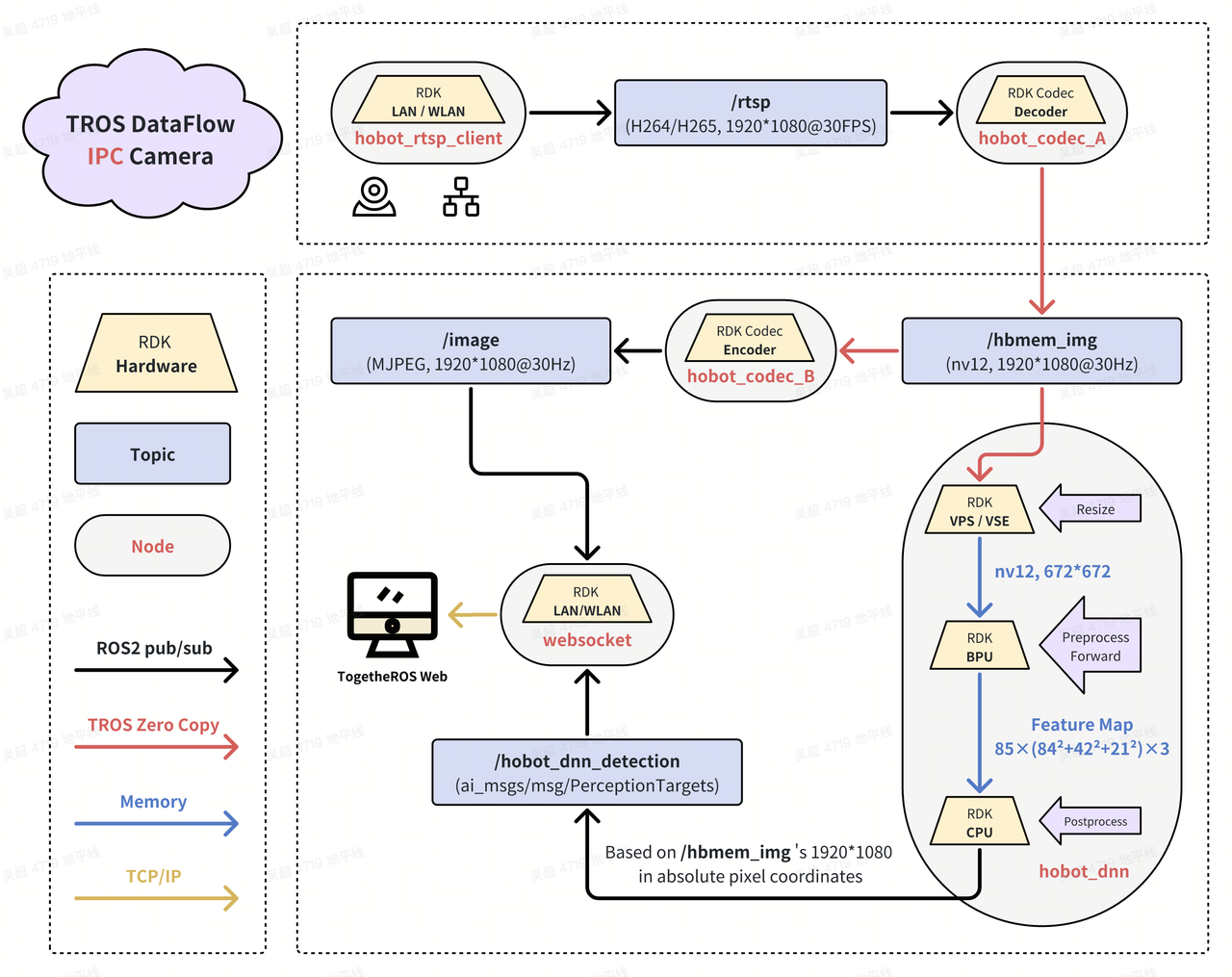
Q7: TROS中的多媒体方案(如视频流处理、编解码)有哪些推荐的参考资源?
A: D-Robotics官方TROS手册中通常会有专门的章节或示例介绍如何在ROS2环境中使用RDK的多媒体能力。
- 社区手册 - 机器人开发 - 应用示例 - 视频应用 (video_boxs):
https://developer.d-robotics.cc/rdk_doc/Robot_development/apps/video_boxs
(请确认此链接为最新且有效。)
这个链接指向的页面或其子页面通常会包含:
- 如何使用MIPI摄像头或USB摄像头发布图像话题。
- 如何使用硬件编解码器(hobot_codec)进行图像/视频的编码(如H.264, H.265, MJPEG)和解码。
- 如何在ROS2节点间高效传输图像数据(可能涉及零拷贝技术)。
- 相关的示例代码和launch文件。
Q8: 启动USB或MIPI摄像头节点后,终端提示“标定数据不存在”(例如 [usb_camera_calibration.yaml] does not exist!),这是正常的吗?
A: 这个提示本身通常是正常的,不一定代表摄像头无法工作。
- 日志级别: 许多ROS节点的默认日志级别是
INFO或WARN。当摄像头节点启动时,它会尝试加载相机的内参标定文件(通常是一个.yaml文件,包含了相机的焦距、畸变系数等参数)。如果找不到这个文件,它会输出一个警告信息,但通常会继续使用一组默认的或无标定的参数来运行。 - 功能验证:
- 即使出现这个警告,摄像头本身可能已经在正常发布图像数据了。
- 您可以在另一个终端中(source好TROS环境后)执行以下命令来验证:
ros2 topic list:查看是否有图像话题(如/image_raw,/image_color,/hbmem_img等)正在发布。ros2 topic hz /your_image_topic_name:查看该图像话题的发布频率。ros2 topic echo /your_image_topic_name:查看是否有图像消息数据正在输出(数据量会很大,很快会刷屏,主要看是否有数据流)。- 使用
rqt_image_view(如果在PC端或板卡Desktop环境)订阅该图像话题,看是否能显示画面。
- 何时需要标定文件: 如果您的应用需要精确的图像测量、三维重建、或者需要对图像进行去畸变处理,那么提供正确的相机标定文件就非常重要。如果只是简单地显示图像或进行一些不依赖精确像素对应的AI推理,缺少标定文件可能影响不大。
Q9: 使用TROS的WebSocket可视化功能时,浏览器页面上不显示图像或AI结果,可能是什么原因?
A: WebSocket可视化不显示内容,可能的原因有很多,需要逐步排查:
-
确保相关ROS节点正常运行:
- 图像发布节点: 必须有一个节点(如
mipi_cam,usb_cam, 或图像回放节点)正在发布图像话题。 - AI推理节点(如果需要显示AI结果): 必须有一个节点正在进行AI推理并发布AI结果话题。
- WebSocket节点本身 (
hobot_websocket或类似): 该节点负责将ROS话题数据转换为WebSocket消息发送给浏览器。 - 使用
ros2 node list和ros2 topic list检查这些节点和话题是否都处于活动状态。
- 图像发布节点: 必须有一个节点(如
-
网络连接与IP地址:
- 确保您的电脑(运行浏览器)和RDK板卡(运行WebSocket服务)在同一个局域网内。
- 在浏览器中��访问的IP地址必须是RDK板卡的正确IP地址。
- 检查是否存在IP地址冲突或路由问题。
-
代理服务器设置:
- 如果您电脑的网络连接配置了代理服务器,请检查代理设置是否可能阻止了对局域网内IP地址(RDK板卡)的直接访问。尝试临时禁用代理或配置代理例外规则。
-
WebSocket节点参数与AI消息同步 (针对AI结果不显示):
hobot_websocket节点在启动时,如果其参数only_show_image设置为False(即期望同时显示图像和AI结果),它可能需要接收到第一个AI结果消息 (ai_msg) 后,才能开始同步图像和AI数据并进行渲染。- 检查: 确保您的AI推理节点确实检测到了目标并发布了至少一帧AI结果。如果AI节点一直没有输出,WebSocket端可能因为等待第一帧AI数据而表现为不显示任何叠加结果。
-
网络带宽与质量:
- 传输未压缩的图像数据(尤其是高分辨率、高帧率)对网络带宽要求较高。如果您的RDK板卡与电脑之间的网络连接质量不佳(例如,Wi-Fi信号弱、网络拥堵、使用手机热点带宽不足),可能导致WebSocket数据传输卡顿、延迟过高或失败。
- 尝试降低图像分辨率或帧率,或者使用压缩图像格式进行传输。
-
RDK板卡端CPU负载过高:
- 如果在RDK板卡自身的图形桌面环境(通过VNC或直连显示器)中打开浏览器来查看WebSocket的渲染结果,板卡的CPU可能会同时承担ROS节点运行、WebSocket服务、图形桌面渲染以及浏览器渲染等多重负载,导致性能瓶颈,进程无法正常运行。
- 建议: 通常建议在另一台PC上打开浏览器来访问RDK上的WebSocket服务。
-
浏览器兼容性或缓存:
- 尝试清除浏览器缓存,或使用不同的浏览器(如Chrome, Firefox, Edge的最新版本)进行测试。
- 查看浏览器开发者工具的控制台(Console)和网络(Network)标签页,看是否有JavaScript错误、WebSocket连接错误或资源加载失败等问题。
-
刷新页面: 有时,简单的刷新网页(Ctrl+R 或 Cmd+R)可能会解决临时的卡顿或连接问题。
Q10: 使用TROS的智能语音功能时报错,或者想使用自己的USB麦克风,应该如何配置?
A:
-
检查声卡设备:
- 首先,确认您的麦克风设备(无论是板载的还是USB外接的)已被系统正确识别。使用以下命令查看已识别的声卡:
cat /proc/asound/cards
ls /dev/snd/cat /proc/asound/cards会列出声卡及其序号(如card 0, card 1)。ls /dev/snd/会显示PCM设备节点(如pcmC0D0c表示card 0, device 0, capture)。
- 首先,确认您的麦克风设备(无论是板载的还是USB外接的)已被系统正确识别。使用以下命令查看已识别的声卡:
-
配置TROS语音节点的麦克风设备号:
- TROS的智能语音相关节点(例如,负责录音或语音识别的节点)通常会有一个参数(例如在launch文件或参数配置文件中)用于指定使用哪个麦克风设备。这个参数的名称可能是
micphone_name、device_name、alsa_device或类似。 - 该参数的值通常是ALSA设备名,格式为
hw:X,Y,其中X是声卡序号 (Card Number),Y是该声卡上的PCM设备序号 (Device Number)。 - 默认值: 可能默认为
"hw:0,0",表示使用声卡0上的设备0。 - 修改: 如果您的目标麦克风(例如USB麦克风)被识别为声卡1上的设备0的录音端点(capture, 通常设备节点名以
c结尾,如pcmC1D0c),那么您需要将该参数值修改为"hw:1,0"。 - 示例: 如果
cat /proc/asound/cards显示您的USB麦克风是card 1,并且arecord -l(列出录音设备) 显示其对应的PCM设备是device 0,则参数应设为hw:1,0。
- TROS的智能语音相关节点(例如,负责录音或语音识别的节点)通常会有一个参数(例如在launch文件或参数配置文件中)用于指定使用哪个麦克风设备。这个参数的名称可能是
-
检查ALSA音量和静音设置:
- 使用
alsamixer命令(在终端中运行),按F6选择正确的声卡,然后按F4查看并调整录音(Capture)相关的音量控制(如 'Mic', 'Capture', 'ADC PGA Gain' 等),确保它们没有被静音(Muted,通常显示为MM,按M键切换)并且音量设置在合适范围。
- 使用
-
权限问题: 确保运行语音节点的进程有权限访问音频设备。
Q11: 为什么不建议在RDK这种嵌入式终端设备上直接运行Rviz或Gazebo?推荐的做法是什么?
A:
-
资源消耗: Rviz (ROS Visualization tool) 和 Gazebo (robot simulator) 都是功能强大但资源消耗巨大的软件。它们需要较强的CPU处理能力、大量的内存以及(尤其是Gazebo和带有复杂3D渲染的Rviz配置)良好的GPU图形加速能力。
-
嵌入式设备限制: RDK系列作为嵌入式开发板,其CPU、内存和图形处理能力通常远不及标准的PC或工作站。在RDK板卡上直接运行Rviz或Gazebo:
- 可能会导致板卡资源耗尽,系统运行极其缓慢甚至卡死。
- 即使能勉强运行,用户体验也会非常差,可视化效果不佳,仿真速度极慢。
- 会严重影响板卡上其他机器人核心程序(如感知、决策、控制节点)的实时性和性能。
-
推荐做法:
- 分布式ROS网络: 利用ROS/ROS2的分布式特性,将Rviz或Gazebo运行在与RDK板卡处于同一局域网下的一台性能较好的PC或Ubuntu虚拟机上。
- 话题订阅/发布:
- RDK板卡上的节点负责发布传感器数据(如图像、点云、里程计等)、机器人状态、AI检测结果等话题。
- PC上运行的Rviz订阅这些来自RDK板卡的话题,进行数据显示和可视化。
- PC上运行的Gazebo可以仿真机器人模型和环境,并通过ROS话题与RDK板卡上的控制节点进行交互(例如,RDK发送控制指令给Gazebo中的机器人,Gazebo发布仿真传感数据给RDK)。
- 网络配置: 确保PC和RDK板卡之间的网络配置正确,ROS_DOMAIN_ID(ROS2)或ROS_MASTER_URI/ROS_IP(ROS1)设置正确,使得它们可以相互发现和通信。对于ROS2,通常只要在同一网络且DOMAIN_ID相同即可自动发现。
- 虚拟机配置: 如果在PC上使用Ubuntu虚拟机运行Rviz/Gazebo,请确保虚拟机的网络模式设置为“桥接模式 (Bridged Adapter)”,这样虚拟机才能获得与RDK板卡在同一网段的独立IP地址。
通过这种方式,可以将计算密集型的可视化和仿真任务放在PC上,而RDK板卡则专注于运行其实时机器人应用程序,从而保证整体系统的性能和稳定性。
Q12: RDK X3的内核版本较老,是否还能支持使用RealSense D435i深度相机?如何安装?
A:
- 支持情况: 尽管RDK X3的Linux内核版本可能相对较老(例如4.14.x),但D-Robotics官方通常会�在其发布的RDK OS系统镜像中,针对常用的外设(如Intel RealSense系列深度相机)预先打入或集成了所需的内核补丁 (patches) 和驱动模块。
- 安装方法: 因此,您通常不需要自行从RealSense SDK源码编译内核模块。D-Robotics官方会提供通过APT软件包管理器直接安装RealSense相机驱动和相关工具的方式。
- 官方教程: 请参考D-Robotics开发者社区或RDK X3用户手册中关于“传感器Demo”或“外设支持”章节中针对RealSense D435i(或其他型号)的说明。 例如,此链接曾提供相关指导:RDK文档 - RealSense图像采集。
- APT安装: 安装过程通常是在配置好D-Robotics官方APT源后,执行类似
sudo apt install librealsense2-dkms librealsense2-utils librealsense2-dev的命令。
- 使用: 安装完成后,您就可以在RDK X3上使用RealSense SDK (librealsense2) 提供的API来获取深度图、彩色图、红外图以及IMU数据(对于D435i)。
- 具体API和数据获取: 关于如何使用librealsense2的API来获取特定数据流、配置相机参数等具体编程问题,请参考Intel RealSense官方的SDK文档和示例代码。
Q13: 如何为TROS配置零拷贝(Zero-Copy)数据传输环境?
A: 零拷贝是一种优化ROS2节点间大数据(如图像)传输性能的技术,通过共享内存等机制避免不必要的内存拷贝。TROS(基于ROS2)也支持零拷贝。
-
TROS Foxy版本 (基于ROS2 Foxy):
- ROS2 Foxy自身对零拷贝的支持尚不完善,D-Robotics在TROS Foxy中可能通过自定义的共享内存方案(如
hobot_shm包)来增强或实现类似零拷贝的功能。 - 请参考TROS Foxy版本对应的官方文档或
hobot_shm包的README,了解其特定的配置和使用方法。
- ROS2 Foxy自身对零拷贝的支持尚不完善,D-Robotics在TROS Foxy中可能通过自定义的共享内存方案(如
-
TROS Humble版本 (基于ROS2 Humble):
- ROS2 Humble对零拷贝(特别是通过借贷消息 Loaned Messages 和DDS的共享内存传输)的支持更为成熟和标准化。
- 配置方法: 通常涉及设置一系列环境变量来启用Fast DDS(一种DDS实现)的共享内存传输特性。具体步骤请参考本FAQ文档“8.3 应用和示例”章节中 Q15: 在TROS Humble版本中如何配置和使用零拷贝(Zero-Copy)数据传输? 的详细解答。
简要回顾关键环境变量:
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export FASTRTPS_DEFAULT_PROFILES_FILE=/opt/tros/humble/lib/hobot_shm/config/shm_fastdds.xml # 路径需确认
export RMW_FASTRTPS_USE_QOS_FROM_XML=1
export ROS_DISABLE_LOANED_MESSAGES=0
-
通用参考:
- D-Robotics官方文档中关于TROS通信优化或特定Demo(如图像传输Demo)的章节,通常会包含零拷贝的配置指南。 例如:RDK文档 - ROS通信 - 零拷贝配置 (请确认链接的最新有效性)。
Q14: 除了D-Robotics官方的APT源,是否有其他ROS2的公开软件源可以使用?
A: 是的。标准的ROS2发行版(如Foxy, Humble, Iron等)都有其官方的APT软件源,由Open Robotics(现为Intrinsic)维护。
-
ROS2官方源:
- 地址通常是
http://packages.ros.org/ros2/ubuntu。 - 在安装标准ROS2或某些依赖于标准ROS2包的第三方软件时,通常需要将此源添加到您的系统中。
- 添加方法(以Humble为例,适用于Ubuntu Jammy 22.04):
- 设置区域设置 (locale):
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8 - 添加ROS2 GPG密钥并添加源:
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null - 更新APT缓存:
sudo apt update
- 设置区域设置 (locale):
- 之后您就可以通过
sudo apt install ros-humble-desktop(安装桌面完整版) 或ros-humble-<package_name>(安装特定包) 来安装标准ROS2 Humble的软件包了。
- 地址通常是
-
国内镜像源:
- 为了加速下载,国内的一些高校或机构(如清华大学TUNA、中科大LUG、上海交大SJTUG等)也提供了ROS2官方软件源的镜像。您可以将上述
packages.ros.org的地址替换为这些镜像站的地址。具体地址请查询对应镜像站的帮助文档。
- 为了加速下载,国内的一些高校或机构(如清华大学TUNA、中科大LUG、上海交大SJTUG等)也提供了ROS2官方软件源的镜像。您可以将上述
注意: 当系统中同时存在D-Robotics TROS的源和ROS2官方源时,apt在安装或更新软件包时会根据包的版本和优先级进行选择。通常,TROS的包会针对RDK硬件有特定优化。