ethernet
前言
S100芯片提供多个标准千兆/万兆以太网控制器, 支持传统的以太网报文收发, PTP/TSN 时间敏感性网络, 以及 EtherCAT 主站等特性。
S600芯片提供多个标准千兆/万兆以太网控制器, 支持传统的以太网报文收发, PTP/TSN 时间敏感性网络, 以及 EtherCAT 主站等特性。
控制器内置硬件多队列, MTL 二层传输层, DMA 引擎等。以实现上述各种场景的报文收发。 本文主要包括网卡使用指南, 开发板 Bringup, 关键特性描述等。
名词解释
| 缩略语 | 英文全名 | 中文解释 |
|---|---|---|
| PTP | Precision Time Protocol | 精确时钟协议 |
| PHC | PTP Hardware Clock | PTP 时钟 |
| TSN | Time-Sensitive Networking | 时间敏感网络 |
| CBS | Credit-Based Shaper | 基于信用的整形器机制 |
| EST | Enhancements to Scheduled Traffic | 增强型整形机制 |
| FPE | Frame Preemption | 帧抢占 |
| tc | traffic control | 流量控制 |
网卡特性介绍
| 特性 | 解释 | S100 |
|---|---|---|
| 配置 | 网口数量配置 | 双网口 |
| 接口 | mac--phy 接口 | 支持 SGMII |
| PPS | 秒脉冲, pps out/in | ✅ |
| TSO | TCP 分段卸载 | ✅ |
| 多队列 | 网卡多队列功能 | ✅ |
| AVB/TSN | 时间敏感性网络 | ✅ |
| C22/C45 | MDIO PHY 数据协议 | ✅ |
| 特性 | 解释 | S600 |
|---|---|---|
| 配置 | 网口数量配置 | 3x gmac + 3x xgmac 其中前2个 gmac 和 pcie 复用 phy |
| 接口 | mac--phy 接口 | 支持 SGMII/USXGMII |
| PPS | 秒脉冲, pps out/in | ✅ |
| TSO | TCP 分段卸载 | ✅ |
| 多队列 | 网卡多队列功能 | ✅ |
| AVB/TSN | 时间敏感性网络 | ✅ |
| C22/C45 | MDIO PHY 数据协议 | ✅ |
网络配置
U-Boot
- 配置 IP
setenv ipaddr x.x.x.x
setenv gatewayip x.x.x.x
setenv netmask x.x.x.x
- 配置 VLAN
setenv vlan xx
- 配置 MAC 地址
setenv ethaddr xx:xx:xx:xx:xx:xx //设置eth mac地址
env del -f ethaddr //删除mac地址
- 切换当前使用的 eth
setenv ethact eth0
setenv ethact eth1
# 如果U-Boot支持双网卡可以切换成功。单网卡切换无效。
Linux/Ubuntu
注意
- 建议使用 Network Management, 即 Ubuntu 桌面进行网卡配置。
- 下述手动通过 ip, ethtool 等命令配置为次选方案。可自行结合 Ubuntu 版本以及网络资料判断是否生效。
- 配置 IP
ip addr add 192.168.1.10/24 dev eth0.10 //推荐
或者
ifconfig eth0.10 192.168.1.10 netmask 255.255.255.0
- 配置 VLAN
ip link add link eth0 name eth0.10 type vlan id 10 //添加vlan id 10
ip link set eth0.10 type vlan egress 0:5 1:5 2:5 3:5 4:5 5:5 6:5 7:5 //配置vlan priority 5
软件介绍
代码位置
- U-Boot ETH 代码位置
drivers/net/hobot_super_gmac.c
drivers/net/hobot_super_xpcs.c
drivers/net/hobot_super_xgmac.c
drivers/net/hobot_s600_xpcs.c
- Kernel ETH 代码位置
hobot-drivers/ethernet/hobot/hobot_eth_super_main.c
hobot-drivers/ethernet/hobot/hobot_eth_super_mdio.c
hobot-drivers/ethernet/hobot/hobot_eth_super_ptp.c
hobot-drivers/ethernet/hobot/hobot_eth_super_tc.c
hobot-drivers/ethernet/hobot/core/...
hobot-drivers/ethernet/hobot/dma/...
网络驱动开发
U-Boot ETH 开发
硬件连接
- 参考 S100设计原理图
- 参考 S600设计原理图
设备树配置
// 配置hsis mode以及参考时钟选择, 如combo phy的复用情况, 参考时钟的来源等。
hsis0: hsis0 {
status = "okay";
compatible = "hobot,super-hsis";
hsi-mode = <4>; /* 4:pcie x2 + gmac0/1; 8:pcie0 x1 + pcie1 x1 + GMAC0/1; */
refclk-mode = <0>; /* 0:internal ref clock; 1:external ref clock; */
#address-cells = <2>;
#size-cells = <2>;
ranges;
/*hsis reg, XPCS0, XPCS1, ETH phy, PCIE phy*/
reg = <0x0 0x33000000 0x0 0x10000>,
<0x0 0x33200000 0x0 0x80000>,
<0x0 0x33280000 0x0 0x80000>,
<0x0 0x330e0000 0x0 0x10000>,
<0x0 0x330d0000 0x0 0x10000>;
};
// 配置hsis mode以及参考时钟选择, 如combo phy的复用情况, 参考时钟的来源, 以及phy眼图信号相关参数。
hsis0: hsis0 {
status = "okay";
compatible = "hobot,super-hsis";
hsi-mode = <4>;
refclk-mode = <0>;/* 0:internal; 1:external; */
xpcs-speed = <0 0 0 5000 10000 10000>; /*gmac0, gmac1, gmac2, xgmac0, xgmac1, xgmac2*/
hobot-txeq = <0 0 0 1 2 4>; /* gmac0/1/2 xgmac0/1/2 tx equalization control*/
hobot-vboost = <5 5 5 5 5 5>; /*gmac0/1/2 xgmac0/1/2*/
#address-cells = <2>;
#size-cells = <2>;
ranges;
/*hsis reg, XPCS0, XPCS1, ETH phy, PCIE phy, XPCS2, XPCS3,XPCS4, XPCS5*/
reg = <0x0 0x33000000 0x0 0x10000>,
<0x0 0x33200000 0x0 0x80000>,
<0x0 0x33280000 0x0 0x80000>,
<0x0 0x330e0000 0x0 0x10000>,
<0x0 0x330d0000 0x0 0x10000>,
<0x0 0x33300000 0x0 0x80000>,
<0x0 0x33380000 0x0 0x80000>,
<0x0 0x33400000 0x0 0x80000>,
<0x0 0x33480000 0x0 0x80000>;
};
- xpcs-speed: 根据不同的 speed 设置 xpcs。
- hobot-txeq: 设置不同档位的眼图参数,取值范围[0, 10],默认是4档,sgmii 不需要调整。
- hobot-vboost: 眼图幅值系数,0不使能。
mdio phy 配置
- phy 连接情况参考原理图和硬件说明
- 软件主要需要关注其中的 reset 管脚以及 phy addr 地址
// drobot-s100-soc.dtsi, 芯片默认的eth配置; 可以被具体board的dts覆盖
eth0: eth0 {
status = "disabled";
compatible = "hobot,super-gmac";
/*MAC, XPCS, ETH PHY, PCIE PHY, hsis reg*/
reg = <0x0 0x330f0000 0x0 0x10000>,
<0x0 0x33200000 0x0 0x80000>;
phy-handle = <&phy1>;
phy-mode = "sgmii";
managed = "in-band-status";
pinctrl-names = "default";
pinctrl-0 = <&peri_emac>;
#address-cells = <1>;
#size-cells = <0>;
};
// drobot-s100-rdk.dts, 根据实际板子情况, 配置属性。 主要phy节点, reset管脚, phy addr等。
// 以及mdio pinmux, function配置等。
ð0 {
status = "okay";
hobot,managed = "sgmii-autoneg";
phy-handle = <&phy0>;
phy-reset-gpios = <&hsi_port0 10 0>;
#address-cells = <1>;
#size-cells = <0>;
phy0: phy@0 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0xe>;
};
};
// hobot-s600-soc.dtsi, 芯片默认的eth配置。可以被具体board的dts覆盖
eth2: gmac2 {
status = "disabled";
compatible = "hobot,super-gmac";
/*MAC, XPCS*/
reg = <0x0 0x33110000 0x0 0x10000>,
<0x0 0x33380000 0x0 0x80000>;
phy-mode = "sgmii";
#address-cells = <1>;
#size-cells = <0>;
fixed-link {
speed = <1000>;
full-duplex;
};
};
// drobot-s600-rdk.dts, 根据实际板子情况, 配置属性。 主要phy节点, reset管脚, phy addr等。
// 以及mdio pinmux, function配置等。
ð2 {
status = "okay";
hobot,managed = "sgmii-autoneg";
phy-handle = <&phy2>;
pinctrl-names = "default";
pinctrl-0 = <&hsi_emac_mdc_hsi2_emac_mdc_hsi2 &hsi_emac_mdio_hsi2_emac_mdio_hsi2>;
phy2: phy@2 {
#address-cells = <1>;
#size-cells = <0>;
reset-gpios = <&gpio_exp_24 8 GPIO_ACTIVE_LOW>;
reset-delay-us = <10000>;
reset-post-delay-us = <150000>;
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0x2>;
};
};
MAC2MAC
- 在 MAC TO MAC 直连情况下, 需要配置为 fixed-link
- 例如
// eth0默认节点配置可参考drobot-s100-soc.dts
// 实际板级配置可在对应dts中描述, 例如可参考drobot-s100-rdk.dts。
// MAC2MAC场景, 主要就是配置成fixed-link模式。即固定好速率, 双工模式等。
ð0 {
status = "okay";
fixed-link {
speed = <1000>;
full-duplex;
};
};
// S600开发板也类��似, 在板级dts中重写成fixed-link模式即可。
ð3 {
status = "okay";
fixed-link {
speed = <10000>;
full-duplex;
};
};
U-Boot 下命令介绍
- mii: phy 读写命令(C22协议) 执行网络命令(如 ping)后初始化网络接口,否则 mdio 命令会执行异常。
mii info <addr> //display MII phy info
mii read <addr> <reg> //read MII phy <addr> register <reg>
- mdio: phy 读写命令(C45)
mdio list //List MDIO buses
mdio read <phydev> [<devad>.]<reg> //read phy register at <devad>.<reg>
- md: 查看统计计数 通过 md 命令读写寄存器查看报文统计计数用于调试。
md[.b, .w, .l, .q] address
Linux ETH 开发
- 驱动代码在 hobot-drivers/ethernet 目录, 可参考软件介绍的描述。
- 控制器驱动部分大部分不需要进行修改, 主要任务还是结合开发板硬件, 配置相关设备树。
hsis 模式配置
注意
- 由于 S100以太网和 pcie 的 phy 部分都有复用关系。所以特别需要注意 hsis 模块的配置。
- 包括 Lane 使用的配置, 以及参考时钟配置等。特别需要注意的是, 由于 U-Boot 中启动时也会配置一次,
- 所以需要确保 U-Boot 的 hsis 配置和 Kernel 是一致的。否则可能会导致实际 Lane 配置不对的情况。
注意
- 由于 S600以太网和 pcie 的 phy 部分都有复用关系。所以特别需要注意 hsis 模块的配置。
- 包括 Lane 使用的配置, 以及参考时钟配置等。特别需要注意的是, 由于 U-Boot 中启动时也会配置一次,
- 所以需要确保 U-Boot 的 hsis 配置��和 Kernel 是一致的。否则可能会导致实际 Lane 配置不对的情况。
&hsis0 {
hsi-mode = <0x4>; /* 0x1: pcie x4, 0x4: pcie x2 + gmac0 + gmac1, 0x8: pcie0 x1 + pcie1 x1 + gmac0 + gmac1 >
refclk-mode = <0>; /* 0:internal; 1:external; */
};
&hsis0 {
hsi-mode = <2>; /* 0x1: pcie x4, 0x2: pcie x2x2, 0x4: pciex2 + ethx2 */
refclk-mode = <0>; /* 0:internal; 1:external; */
xpcs-speed = <0 0 0 1000 10000 10000>; /*gmac0, gmac1, gmac2, xgmac0, xgmac1, xgmac2*/
hobot-txeq = <0 0 0 1 2 4>; /* gmac0/1/2 xgmac0/1/2 tx equalization control*/
hobot-vboost = <5 5 5 5 5 5>; /*gmac0/1/2 xgmac0/1/2*/
};
网卡和 PHY 配置
// 芯片默认网卡节点可以参考drobot-s100-soc.dtsi
// 板级相关的配置, 根据实际硬件连接情况来。例如传统sgmii phy模式的情况, 可参考rdk-v0p5.dtsi中的节点。
ðernet0 {
status = "okay";
phy-handle = <&phy0>;
hobot,managed = "sgmii-autoneg";
pinctrl-names = "default";
pinctrl-0 = <&peri_emac>;
mdio {
#address-cells = <0x1>;
#size-cells = <0x0>;
phy0: phy@0 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0x2>;
};
};
};
// 芯片默认网卡节点可以参考drobot-s600-soc.dtsi
// 板级相关的配置, 根据实际硬件连接情况来。例如传统sgmii phy模式的情况, 可参考rdk-s600-mcb.dtsi中的节点。
/* gmac2 */
ðernet2 {
status = "okay";
phy-handle = <&phy2>;
hobot,managed = "sgmii-autoneg";
pinctrl-names = "default";
phy-mode = "sgmii";
pinctrl-0 = <&hsi_emac_mdc_hsi2_emac_mdc_hsi2 &hsi_emac_mdio_hsi2_emac_mdio_hsi2>;
mdio {
#address-cells = <0x1>;
#size-cells = <0x0>;
reset-gpios = <&gpio_exp_24 8 GPIO_ACTIVE_LOW>;
reset-delay-us = <10000>;
reset-post-delay-us = <150000>;
phy2: phy@2 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0x2>;
};
};
};
MAC 和 PHY 常见配置
- 参考上述的设备树内容, 以及 dts 文件中的更完整信息
- 描述下常见的 phy 配置参数
- reset-delay-us:表示复位时间。
- reset-post-delay-us:表示解复位后延时时间(phy 从解复位到完成初始化的时间)。
- ethernet-phy-ieee802.3-c22: mdio compatible 兼容名, 说明 phy mdio 走的是 C22协议。 常见的如 RTL 千兆 phy 都支持这个协议。
- ethernet-phy-ieee802.3-c45: mdio compatible 兼容名, 说明 phy mdio 走的是 C45协议。 参考手册万兆 PHY, 以及一些高端 PHY 会走 C45协议。
- MAC 相关常见一些配置
- sgmii-autoneg:配置 SGMII 自协商。
- phy-mode: 与 phy 的连接方式。如 sgmii, usxgmii 等。
- xpcs-speed: xpcs 工作速率, 例如配置成1000, 强制 xpcs 1G sgmii mode
- hobot,xgmac_gmii: xgmac 工作在 gmii 模式
- 更多高级特性配置, 可参考后续章节
MAC2MAC
- 和 U-Boot 下类似, MAC2MAC 场景, 最主要就是配置成 fixed-link 模式
// eth0默认节点配置可参考drobot-s100-soc.dts
// 实际板级配置可在对应dts中描述, 例如可参考drobot-s100-rdk.dts。
// MAC2MAC场景, 主要就是配置成fixed-link模式。即固定好速率, 双工模式等。
ðernet0 {
status = "okay";
fixed-link {
speed = <1000>;
full-duplex;
};
};
// S600开发板也类似, 在板级dts中重写成fixed-link模式即可。
ðernet2 {
status = "okay";
fixed-link {
speed = <10000>;
full-duplex;
};
};
- fixed-link 常用节点含义描述
- speed(整型,必须),表示链接速率,可以设置为10、100、1000。
- full-duplex(布尔型,可选),表示双工方式,缺省是半双工方式。
- pause(布尔型,可选),表示是否使能 pause,缺省禁止 pause。
- asym-pause(布尔型,可选),表示是否使能 asym-pause,缺省禁止 asym-pause。
- link-gpio(gpio-list,可选),表示是否可以读取 gpio 以确定链接是否已启动。
TSO
- 即 TCP Segmentation Offload, 现代网卡硬件支持 TCP 分段卸载功能, 以减轻 TCP 分段业务的 cpu 负载。
- TSO 开启后, 内核的 GSO(Generic Segmentation Offload)会自动开启。
- 可以通过 hobot, tso 标记进行网卡硬件 tso 功能的控制。
hobot,tso = <1>; // 打开网卡TSO功能
XGMAC 配置成1G 模式
- 主要通过设备树 hsis, 以及独对应网卡节点进行配置, 例如
hsis0: hsis0 {
status = "okay";
compatible = "hobot,super-hsis";
xpcs-speed = <0 0 0 1000 10000 10000>; /*gmac0, gmac1, gmac2, xgmac0, xgmac1, xgmac2*/
};
ethernet3: xgmac0@0x33130000 {
compatible = "hobot,hobot_xgmac";
hobot,xgmac_gmii;
};
- xpcs-speed: 配置1000前置 xpcs 工作在1G sgmii 模式
- hobot,xgmac_gmii: 强制 xgmac 工作在 gmii 模式下
中断聚合
ethernet3: xgmac0@0x33130000 {
compatible = "hobot,hobot_xgmac";
hobot,disable_coal;
};
- hobot,disable_coal; # 网卡默认是开启中断聚合功能的, 可以通过该标记关闭中断聚合功能
RSS
- 接收端缩放, 即多队列网卡硬件支持的接收端负载均衡技术
- 通常是万兆网卡, 例如 S600需要该项技术
ethernet3: xgmac0@0x33130000 {
compatible = "hobot,hobot_xgmac";
hobot,multi_irq;
hobot,rss_en;
};
- RSS 网卡接收端缩放技术, 简单说就是网卡硬件通过计算数据包五元组(IP,端口, 协议)的 hash 值, 然后将网卡的中断, 通过相关策略, 分发到不同核心。以进行接收端 cpu 负载均衡的行为。
- 所以该技术依赖网卡硬件的 hash 算法, RSS 特性支持, 以及网卡多中断机制。
- hobot,multi_irq; # 网卡多中断支持, 注册多中断的不同 ISR 处理。
- hobot,rss_en; # 网卡接收端缩放功能使能。
HSIS, XPCS
hsis0: hsis0 {
status = "okay";
compatible = "hobot,super-hsis";
hsi-mode = <4>;
refclk-mode = <0>;/* 0:internal; 1:external; */
xpcs-speed = <0 0 0 5000 10000 10000>; /*gmac0, gmac1, gmac2, xgmac0, xgmac1, xgmac2*/
hobot-txeq = <0 0 0 1 2 4>; /* gmac0/1/2 xgmac0/1/2 tx equalization control*/
hobot-vboost = <5 5 5 5 5 5>; /*gmac0/1/2 xgmac0/1/2*/
};
注意
- 开机启动时的 hsis, xpcs 配置, 是采用的 U-Boot 中 hsis 的配置。
- Linux 中的 hsis 配置, 仅用于休眠唤醒时, 对 hsis mode 和 xpcs 模式的恢复。
- 所以, 当需要修改 hsis 配置时, 需要确保与 U-Boot hsis 节点同步修改。
队列
- 现代网卡都是多队列网卡。
- 对于队列调度策略, 优先级配置等, 可以通过设备树进行配置。
ethernet4: xgmac0@0x33140000 {
compatible = "hobot,hobot_xgmac";
hobot,mtl-rx-config {
hobot,rx-queues-to-use = <8>;
hobot,rx-sched-sp;
queue0 {
hobot,dcb-algorithm;
hobot,priority = <0x1>;
};
queue1 {
hobot,avb-algorithm;
hobot,route-ptp;
};
...
};
hobot,mtl-tx-config {
hobot,tx-queues-to-use = <8>;
hobot,tx-sched-wrr;
queue0 {
hobot,dcb-algorithm;
};
queue1 {
hobot,avb-algorithm;
hobot,priority = <0x2>;
};
...
};
};
- hobot,mtl-tx-config 配置:
| 属性 | 描述 |
|---|---|
| hobot,tx-sched-wrr | 多队列时 round robin 调度,当没有 tsn 或业务优先级需求时 可以选择 rr 调度 |
| hobot,tx-sched-sp | 严格优先级调度 |
| hobot,avb-algorithm | 发送队列 avb 机制可用于 tsn |
| hobot,dcb-algorithm | 队列0以及 rr 调度时,须配置成 dcb 模式 |
- hobot,mtl-rx-config 配置:
| 属性 | 描述 |
|---|---|
| hobot,rx-sched-sp | 接收严格优先级调度,接收队列无 rr 调度。 |
| hobot,avb-algorithm | 接收队列 avb 机制可用于接�收 gptp 报文 |
| hobot,dcb-algorithm | dcb 机制用于根据 vlan 优先级选择接收队列。从而达到不同的 napi 线程承接不同优先级的任务 |
提示
- 根据业务需求配置队列调度机制和队列的模式。
- 当配成多队列时,队列均分硬件 buf,无多队列需求时,可以只保留一个队列独占全部硬件 buf
网卡常用命令介绍
ethtool
- ethtool: 查看统计计数,设置 phy 等, 支持以下命令。
# 查看统计计数
ethtool -S eth0
# 显示时间戳能力
ethtool -T eth0
# 进行Loopback测试
ethtool -t eth0 offline
# 控制TSO功能开关
ethtool -K eth0 tso on/off
# 控制checksum功能开关
ethtool -K eth0 rx-checksum on/off
# 切换网络速率
ethtool -s eth0 speed 100 duplex full autoneg on
# 开启帧抢占
ethtool hobot_gmac --set-fp eth0 fp on
vconfig
- 配置 vlan
- 可用 ip 命令替代
vconfig add eth0 3
iperf3
- 带宽, 丢包等测试。
- 测试命令
server: iperf3 -s
client tcp: iperf3 -c serverip -t 60
client udp: iperf3 -c serverip -u -b 1G -l 8K -t 60
tcpdump
- 抓包工具
- 测试命令
tcpdump -i eth1 -e # 过滤报文并输出到终端
tcpdump -i eth1 -w eth1.pcap # 过滤报文保存到文档,可以用wireshark分析
phytool
- 可以通过该工具读取和设置 c22/c45 phy 寄存器。
- 例如
# 帮助信息
ADDR := C22 | C45
C22 := <0-0x1f>
C45 := <0-0x1f>:<0-0x1f>
phytool read IFACE/ADDR/REG
phytool write IFACE/ADDR/REG <0-0xffff>
# 例子
root@hobot:~# phytool read eth0/0x7:1/2
0x002b
root@hobot:~# phytool read eth1/0xE/2
0x0141
网卡时间同步
- 包含 PTP, PPS, PHC 等技术。
PPS
- Pulse Per Second. 秒脉冲, 网卡硬件层面的一种时间同步机制。通常与 PTP(IEEE 1588)/gPTP 配套使用。 以实现汽车, 机器人系统之间的时间同步。
- 分为 pps in 和 pps out, 即可以作为从设备接收外部高精度的秒脉冲, 也可以作为主设备输出秒脉冲信号。
pps in
- pps in 用于以太网 PHC 时间的 snapshot 的触发源。
pps out
- eth pps 只支持单个 pps out。
- 可以通过以下命令进行配置和测试
ethtool hobot_gmac --set-flex-pps eth0 index 0 fpps on interval 1000000000
PHC snapshot
- 即 Ethernet PTP Hardware Clock, 网卡时间同步硬件时间戳。
- 获取 phc snapshot 时间,用于计算时间差。
- 举例说明使用方法
// 打开PHC设备
phcfd = open(“/dev/ptp0”, O_RDWR);
// 通过ioctl设置PHC的snapshot源
struct ptp_extts_request extts_request;
extts_request.index = phc_snapshot_source;
extts_request.flags = PTP_ENABLE_FEATURE;
ioctl(phcfd, PTP_EXTTS_REQUEST, &extts_request);
// 通过read接口, 获取PHC时间
struct ptp_extts_event event;
read(phcfd, &event, sizeof(event));
phctime->tv_sec = event.t.sec;
phctime->tv_nsec = event.t.nsec;
// 设置PHC时间,这个执行完毕,PHC时间会被加上offset
clockadj_step(FD_TO_CLOCKID(phcfd), offset);
// 关闭PHC设备
close(phcfd);
时间同步 gptp
应用层接口
- POSIX 网络与 PTP 硬件时钟 API 对照表
| 功能分类 | 核心 POSIX API 代码 |
|---|---|
| L2 报文收发 | socket(PF_PACKET, SOCK_RAW, htons(ETH_P_ALL));bind(fd, (struct sockaddr *) &addr, sizeof(addr));setsockopt(fd, SOL_SOCKET, SO_BINDTODEVICE, name, strlen(name)); /* 绑定到指定网卡 */setsockopt(fd, SOL_SOCKET, SO_ATTACH_FILTER, &prg, sizeof(prg)); /* 挂载报文过滤器 */ioctl(sock, SIOCGIFHWADDR, &ifr); /* 获取网卡 MAC 地址 */ |
| 报文硬件时间戳 | ioctl(fd, SIOCSHWTSTAMP, &ifreq); /* 开启硬件时间戳 */setsockopt(fd, SOL_SOCKET, SO_TIMESTAMPING, &flags, sizeof(flags)); /* 启用时间戳传递 */recvmsg(fd, &msg, MSG_ERRQUEUE); /* 获取发送报文硬件时间戳 */recvmsg(fd, &msg, 0); /* 获取接收报文硬件时间戳 */ |
| 获取网卡 PHC 索引 | socket(AF_INET, SOCK_DGRAM, 0);ioctl(fd, SIOCETHTOOL, &ifr); |
| PHC 时间读写 | open("/dev/ptp0", O_RDWR);FD_TO_CLOCKID(fd);clock_gettime(clkid, &ts);clock_settime(clkid, &ts); |
| PHC 频率调整 | clock_adjtime(clkid, &tx); /* 调整频率、时间偏移 */ |
时间同步步骤
- Master
ptp4l -P -H -2 -i eth0 -p /dev/ptp0 -m
- Slave
ptp4l -P -H -2 -i eth0 -p /dev/ptp0 -m -s -l 7
- 其他
- 更详细配置参见第三方工具 linuxptp 源码中的 automotive-master.cfg,automotive-slave.cfg,比如减少 ptp 同步完成时间。
TSN
TSN 介绍
- Time-Sensitive Networking, 时间敏感性网络。
- TSN 由一系列技术标准构成,其主要分为时钟同步、数据调度(即整形器)以及系统配置三个部分相关通用标准。
TSN-VLAN
- TSN 在 IEEE 802.1Q 仅指 ISO/OSI 参考模型的第二层数据链路层的标准。
- 802.1Q 标准的 VLAN,该标准在标准以太网帧中插入4个字节用于定义其特征,TSN 的标签位定义下图所示:
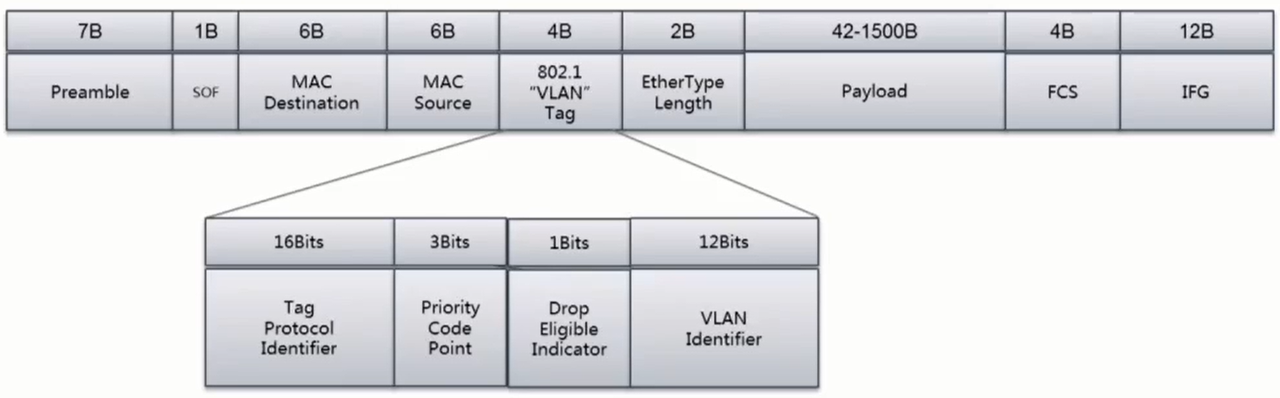
- 对 TSN 网络而言,不同优先级或服务等级(class of service,CoS)的服务对应上图中的 PCP 码。优先级代码(prioritycode point,PCP)由3位代码构成;3位 PCP 码定义了0(最低)~7(最高)这8个优先级,传输类型分别对应 基础、最大努力、卓越努力、严苛应用、延时和抖动小于100ms 的视频、延时和抖动小于10ms 的音频、内部网络控制、网络控制。
多队列
- VLAN 优先级以及多个协议需要多个队列来承接,多队列是实现 TSN 的基础。
- 数据包与队列的映射关系由网卡驱动中的 ndo_select_queue 方法实现。
数据调度(整形器)
基于信用的整形器机制(CBS)(IEEE 802.1-Qav)
- 每个队列设置一定的信用值,根据信用值对应带宽,CBS 将队列分为 Class A(Tight delay bound)和 Class B(Loose delay bound)。
增强型整形机制( EST)(IEEE 802.1Qbv-2015)
- EST 由 IEEE 802.1Qbv 定义,也叫 TAS(Time Awareness Shaper)。是基于预先设定的周期性门控制列表,动态地为出口队列提供开/关控制的机制。 Qbv 定义了一个时间窗口,是一个时间触发型网络(Time-trigged),这个窗口在这个机制中是被预先确定的,同时这个门控制列表被周期性的扫描, 并按预先定义的次序为不同的队列开放传输端口。
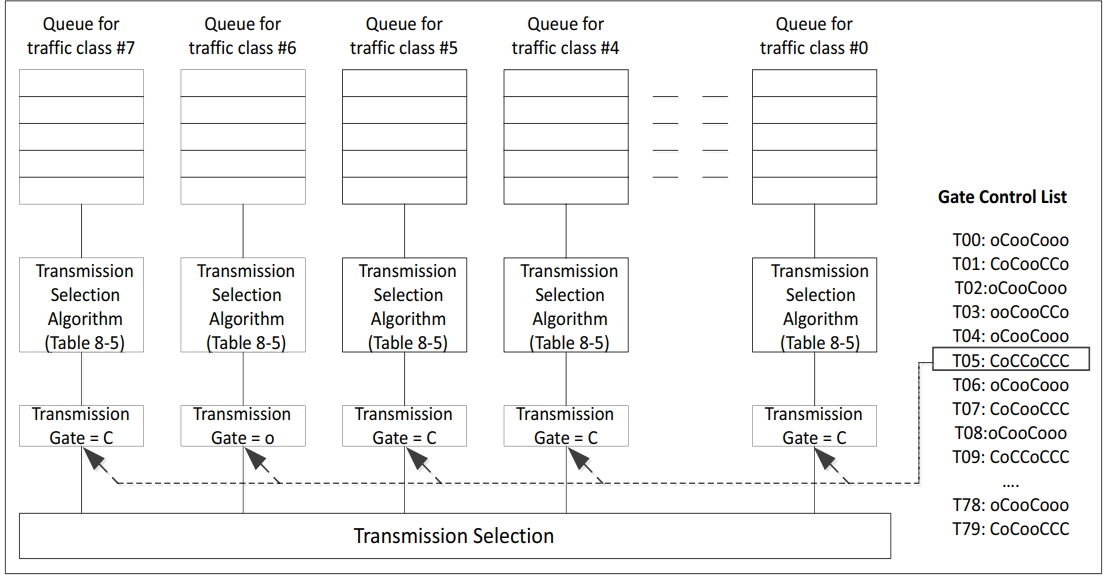
- IEEE 802.1Qbv 规范的框图,说明了门控制列表如何根据为每个事件提供的时间表来管理门关闭(C-close)和打开(O-open)事件。
- GCL 有以下两部分:
- 时间间隔:定义时间,以纳秒为单位,在从列表中读取下一个门控制项之前,门控制项是有效的。
- 门控:定义每个 TC 的门的逻辑1表示的开(O-open)或逻辑0表示的关(C-close)状态。
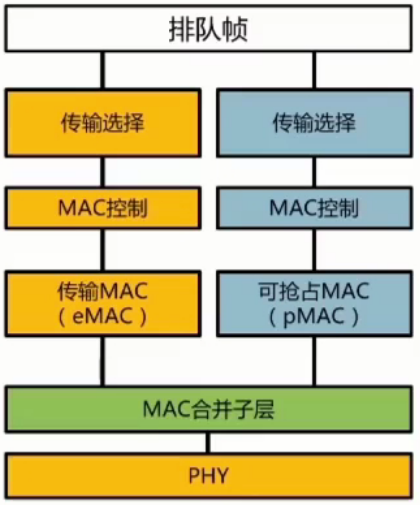
帧抢占( FPE)(IEEE 802.1Qbu-2016)
- 为了解决 EST 的保护带宽的浪费以及优先级反转问题,引入了抢占标准。因此,TSN 的802.1Qbu 和 IEEE 802.3工作组共同开发了 IEEE 802.3br,即可抢占式 MAC 机制,由可被抢占 MAC(pMAC-Preemptable MAC)和快速 MAC(eMAC-express MAC)组成。pMAC 可以被 eMAC 抢占。 通过抢占,保护带宽可以被减少至最短低优先级帧片段。
提示
- 由于抢占改变了帧的格式,所以对接交换机时也需要对端支持 FPE。
配置验证
tc
- 关于 TSN 各种特性, 通常采用 Linux 原生自带的 tc 命令(即 Traffic Control)进行配置和验证
- 支持如下几种方式:
提示
SHAPING(限制)、 SCHEDULING(调度)、POLICING(策略)、DROPPING(丢弃)
CBS
- 命令格式:
tc qdisc ... dev dev parent classid [ handle major: ] cbs idleslope <idleslope> sendslope <sendslope> hicredit <hicredit> locredit <locredit> [ offload 0|1 ]
- 验证:
## 配置CBS qdisc,将队列1的带宽设置为 40Mbps,测试带宽
root@hobot:~# tc qdisc add dev eth0 parent root handle 6666 mqprio num_tc 2 map 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 queues 1@0 1@1 hw 0
root@hobot:~# tc qdisc replace dev eth0 parent 6666:2 cbs idleslope 40000 sendslope -960000 hicredit 60 locredit -1440 offload 1
root@hobot:~# tperf eth0 10000 1
sending 10000 packets: prio=0x1 (class B)
10000 packets: 9.708405 MB in 2044712 us
39.829567 Mbps
EST
- 命令格式:
tc qdisc ... dev dev parent classid [ handle major: ] taprio num_tc tsc map P0 P1 P2 ... queues count1@offset1 count2@offset2 ... base-time base-time clockid clockid
sched-entry <command 1> <gate mask 1> <interval 1>
sched-entry <command 2> <gate mask 2> <interval 2>
sched-entry <command 3> <gate mask 3> <interval 3>
sched-entry <command N> <gate mask N> <interval N>
...
flags number
- 验证:
## 队列3每100ms循环发送一次,一次发送10ms
root@hobot:~# ptp4l -P -H -2 -i eth0 -p /dev/ptp0 -m &
root@hobot:~# tc qdisc replace dev eth0 parent root handle 100 taprio num_tc 4 map 0 1 2 3 queues 1@0 1@1 1@2 1@3 base-time 1000 sched-entry S 8 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 sched-entry S 0 10000000 flags 2
root@hobot:~# tc qdisc show dev eth0
qdisc taprio 100: root refcnt 9 tc 4 map 0 1 2 3 0 0 0 0 0 0 0 0 0 0 0 0
queues offset 0 count 1 offset 1 count 1 offset 2 count 1 offset 3 count 1
clockid invalid flags 0x2 base-time 1000 cycle-time 100000000 cycle-time-extension 0
index 0 cmd S gatemask 0x8 interval 10000000
index 1 cmd S gatemask 0 interval 10000000
index 2 cmd S gatemask 0 interval 10000000
index 3 cmd S gatemask 0 interval 10000000
index 4 cmd S gatemask 0 interval 10000000
index 5 cmd S gatemask 0 interval 10000000
index 6 cmd S gatemask 0 interval 10000000
index 7 cmd S gatemask 0 interval 10000000
index 8 cmd S gatemask 0 interval 10000000
index 9 cmd S gatemask 0 interval 10000000
root@hobot:~# tperf eth0 10000 3
sending 10000 packets: prio=0x3 (class A)
10000 packets: 9.708405 MB in 896210 us
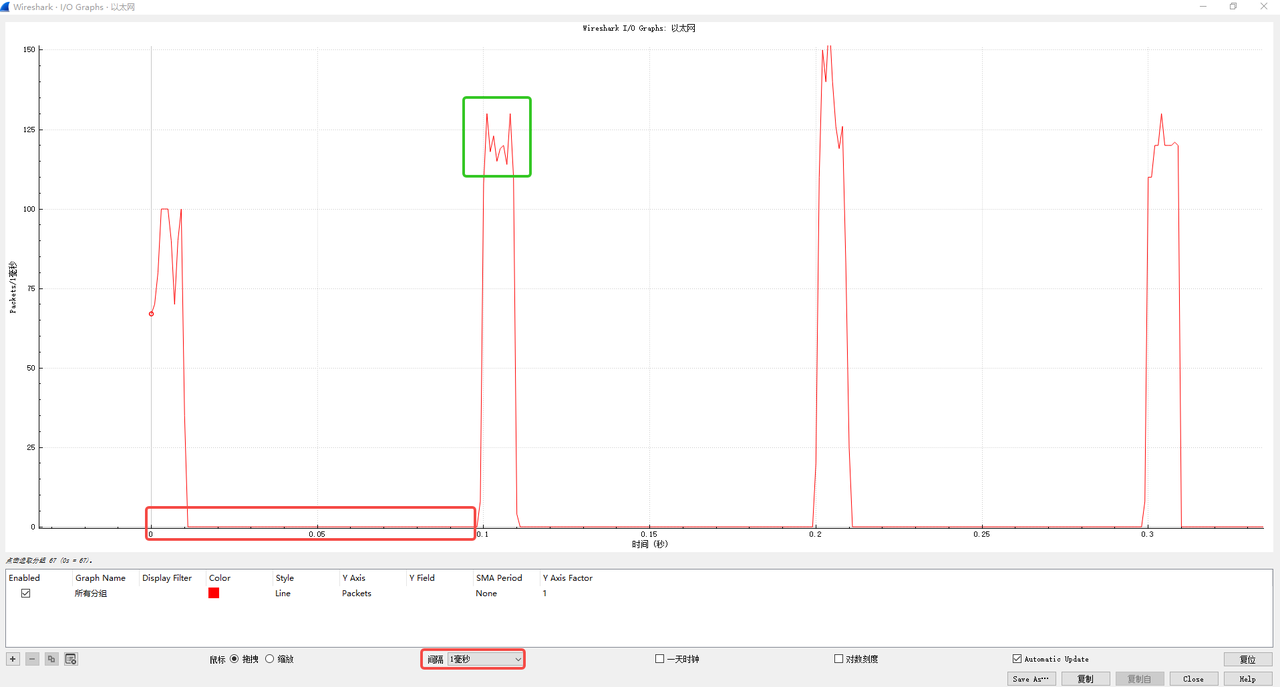
90.871559 Mbps
- wireshark 抓包如下图:
测试
功能测试�
-
ping 测试
- 测试步骤:ping xx.xx.xx.xx
-
ssh
- 测试步骤:ssh root@xx.xx.xx.xx
稳定性测试
-
reboot 测试
- 进行循环 reboot 测试,并检查网络是否可以 ping 通。
-
上下电测试
- 使用继电器进行循环上下电,检查 S100网络是否正常开启。
- 使用继电器进行循环上下电,检查 S600网络是否正常开启。
-
iperf3 24小时测试
- tcp 测试
Server:iperf3 -s
Client:iperf3 -c x.x.x.x -t 86400- udp 测试
Server:iperf3 -s
Client:iperf3 -c x.x.x.x -t 86400 -u -b 1G -l 8K -
up/down 循环测试
#!/bin/sh
echo 14 4 1 7 > /proc/sys/kernel/printk
i=0
times=10000000000000
ifconfig eth0 down
dmesg -c
while [ $i -le $times ];do
echo "test times : $i"
i=$(($i+1))
echo "~~~~~new begin~~~~~"
ifconfig eth0 up
sleep 2
note=$(dmesg -c | grep "Link is Up" | wc -l)
echo $note
if [ 1 -ne $note ]
then
echo "!!!error!!, while break!!!!"
break
fi
ifconfig eth0 down
done
性能测试分析
拓扑
- 直接 S100直连即可
- 直接 S600直连即可
napi 独立线程化
- linux 网络任务由 ksoftirqd/n 处理,默认任务优先级相对较低,独立后可提高 CPU 利用率以及 TSN 的相关的控制。 丢包率在空负载的情况下可以达到0丢包,在大负载情况下可以通过规划项目整体任务的优先级达到性能平衡。
root@hobot:~# echo 1 > /sys/class/net/eth0/threaded
root@hobot:~# ps -ef | grep napi
1705 root 19 0 0 SW [napi/eth0-260]
1706 root 19 0 0 SW [napi/eth0-259]
1707 root 19 0 0 SW [napi/eth0-258]
1708 root 19 0 0 SW [napi/eth0-257]
1710 root 19 0 3584 S grep napi
root@hobot:~# iperf3 -s
-----------------------------------------------------------
Server listening on 5201
-----------------------------------------------------------
Accepted connection from 192.168.1.249, port 58418
[ 5] local 192.168.1.249 port 5201 connected to 192.168.1.249 port 55021
[ ID] Interval Transfer Bitrate Jitter Lost/Total Datagrams
[ 5] 0.00-1.00 sec 98.0 MBytes 822 Mbits/sec 0.022 ms 0/12544 (0%)
[ 5] 1.00-2.00 sec 108 MBytes 907 Mbits/sec 0.015 ms 0/13841 (0%)
[ 5] 2.00-3.00 sec 103 MBytes 865 Mbits/sec 0.019 ms 0/13200 (0%)
[ 5] 3.00-4.00 sec 113 MBytes 947 Mbits/sec 0.019 ms 0/14452 (0%)
[ 5] 4.00-5.00 sec 114 MBytes 956 Mbits/sec 0.023 ms 0/14586 (0%)
[ 5] 5.00-6.00 sec 111 MBytes 931 Mbits/sec 0.028 ms 0/14211 (0%)
[ 5] 6.00-7.00 sec 114 MBytes 953 Mbits/sec 0.020 ms 0/14539 (0%)
[ 5] 7.00-8.00 sec 105 MBytes 879 Mbits/sec 0.018 ms 0/13410 (0%)
[ 5] 8.00-9.00 sec 112 MBytes 939 Mbits/sec 0.016 ms 0/14331 (0%)
[ 5] 9.00-10.00 sec 113 MBytes 946 Mbits/sec 0.024 ms 0/14429 (0%)
[ 5] 10.00-10.00 sec 112 KBytes 947 Mbits/sec 0.033 ms 0/14 (0%)
- - - - - - - - - - - - - - - - - - - - - - - - -
[ ID] Interval Transfer Bitrate Jitter Lost/Total Datagrams
[ 5] 0.00-10.00 sec 1.06 GBytes 915 Mbits/sec 0.033 ms 0/139557 (0%) receiver
调试
Log
- 系统日志
- dmesg, pstore 日志分析
- 内存检查
- 检查内存是否有泄露导致网络包内存无法分配。
Ringbuf
-
Tx ringbuf
- 查看/sys/class/net/
<interface>/descriptors/dump_tx_desc。 - 举例:
cat /sys/class/net/eth0/descriptors/dump_tx_desc
cat /sys/class/net/eth1/descriptors/dump_tx_desc - 查看/sys/class/net/
-
Rx ringbuf
- 查看/sys/class/net/
<interface>/descriptors/dump_rx_desc。
cat /sys/class/net/eth0/descriptors/dump_rx_desc
cat /sys/class/net/eth1/descriptors/dump_rx_desc - 查看/sys/class/net/
统计计数
- ethtool -S
<interface>查看报文 mmc 统计信息,以及其他的统计信息。 - netstat 查看协议栈相关的信息。如协议栈报文计数及 tcp/udp 状态信息等。
开发常见问题排查
EQOS_DMA_MODE_SWR stuck
- 描述: emac 软复位失败。
- U-Boot 日志如下:EQOS_DMA_MODE_SWR stuck。
- linux 日志:device or resource busy。dmesg 日志如下:
[ 21.720702] hobot_gmac 330f0000.ethernet eth0: init_dma_engine: Failed to reset dma
[ 21.720717] hobot_gmac 330f0000.ethernet eth0: hw_setup, DMA engine initilization failed
[ 21.720723] hobot_gmac 330f0000.ethernet eth0: eth_netdev_open, Hw setup failed - 故障排除。
- 检查 SGMII 参考时钟是否提供,若使用内部时钟检查 clock 是否使能。
phy link 不上
- 故障排除。
- 使用 mdio/mii/phytool 命令能否正常读写 phy 寄存器。
- 检查 phy 时钟、phy 复位、phy 供电等。
- 检查变压器等。
发送异常
- 故障排除。
- 检查 phy link 是否 UP。
- 检查工作模式(速率,双工等)。
- 确认 transmit 接口是否被调用。
- 确认发送统计计数。
- 对端查看是否错包等。
- 使用环回定位故障点。
接收异常
- 故障排查
- 测量 phy tx 时钟。
- mac 环回,若正常收包。可判定 phy tx 时钟 与 MAC rx 接收配合问题。
- 查看是否有错包,如果有 ECC 错包可推断是信号质量问题。
大量错包
- 故障排除。
- 检查 clk 是否符合要求。
- 条件允许的话,测下信号的眼图。
- 降速测试。
FAQ
TSN
- 问:S100支持哪些 TSN 标准?
- 问:S600支持哪些 TSN 标准?
- 答:基于信用的整形器机制(credit-based shaper,CBS)(IEEE 802.1-Qav)、 增强型整形机制(Enhancements to Scheduled Traffic,EST)(IEEE 802.1Qbv-2015)、 帧抢占(Frame Preemption,FPE)(IEEE 802.1Qbu-2016)。
phy
- 问:S100适配过哪些 phy?
- 问:S600适配过哪些 phy?
- 答:Realtek 8211、Marvell 88E1512、Marvell 88Q2121、Marvell 88Q2220、TI dp83867、Marvell CUX3520。
网络环境
- 问:S100无法 ping 通 Windows,Windows 可以 ping 通 S100?
- 答:检查 Windows 的防火墙是否关闭,windows 自带防火墙如下图:
U-Boot 调试与升级
-
问:U-Boot 网络自协商失败或协商成千兆后无法 PING 通?
-
答:检查网络是否为6类线。phy 和对端可能在百兆或千兆之间切换,导致 mac 与 phy 之间的速率不匹配。
-
问:U-Boot 无法读写 phy?
-
答:检查 phy 是否解复位,软件使用的 mdio 地址与硬件配置是否一致。
-
问:U-Boot 升级失�败(ping 不通)?
-
答:检查 IP 的配置,serverip,使用小局域网或直连 PC。 检查 MAC 的配置,检查使用的网口是否为期望的网口。 检查网线是否为6类线。