VIO(视频输入)API
VIO 模块提供操作 MIPI 摄像头和操作图像处理的功能。
VIO API提供了以下的接口:
| 函数 | 功能 |
|---|---|
| sp_init_vio_module | 初始化VIO对象 |
| sp_release_vio_module | 销毁VIO对象 |
| sp_open_camera | 打开摄像头 |
| sp_open_camera_v2 | 指定分辨率打开摄像头 |
| sp_open_vps | 打开VPS |
| sp_vio_close | 关闭摄像头 |
| sp_vio_get_frame | 获取视频图像帧 |
| sp_vio_set_frame | 发送视频图像帧给vps模块 |
sp_init_vio_module
【函数原型】
void *sp_init_vio_module()
【功能描述】
初始化VIO对象,创建操作句柄。在其他接口��调用前必须执行。
【参数】
无
【返回类型】
成功返回一个VIO对象指针,失败返回NULL
sp_release_vio_module
【函数原型】
void sp_release_vio_module(void *obj)
【功能描述】
销毁VIO对象。
【参数】
obj: 调用初始化接口时得到的VIO对象指针。
【返回类型】
无
sp_open_camera
【函数原型】
int32_t sp_open_camera(void *obj, const int32_t pipe_id, const int32_t video_index, int32_t chn_num, int32_t *width, int32_t *height)
【功能描述】
初始化接入到RDK S100上的MIPI摄像头。 支持设置输出分辨率,支持设置最多6组分辨率,只支持缩小。缩小倍率范围为[1, 1/64)
【参数】
obj: 已经初始化的VIO对象指针pipe_id:支持多组数据输入,建议填0video_index:camera对应的host编号。 -1表示自动探测;0, 1, 2 请参考host编号选择小节chn_num:设置输出多少种不同分辨率的图像,最大为6,最小为1。width:配置输出宽度的数组地址height:配置输出高度的数组地址
【返回类型】
成功返回 0,失败返回 -1
sp_open_camera_v2
【函数原型】
int32_t sp_open_camera_v2(void *obj, const int32_t pipe_id, const int32_t video_index, int32_t chn_num, sp_sensors_parameters *parameters, int32_t *width, int32_t *height)
【功能描述】
初始化接入到RDK S100上的MIPI摄像头。
支持指定摄像头原始输出RAW的分辨率大小,通过sp_sensors_parameters设置。
支持设置输出分辨率,支持设置最多6组分辨率,只支持缩小。缩小倍率范围为[1, 1/64)
目前支持的摄像头分辨率见下表:
| camera | 分辨率 |
|---|---|
| IMX219 | 1920x1080@30fps(default) |
【参数】
obj: 已经初始化的VIO对象指针pipe_id:支持多组数据输入,建议填0video_index:camera对应的host编号。 -1表示自动探测;0, 1, 2 请参考host编号选择小节chn_num:设置输出多少种不同分辨率的图像,最大为6,最小为1。parameters:camera RAW输出相关结构体,用于指定分辨率和帧率width:配置输出宽度的数组地址height:配置输出高度的数组地址
sp_sensors_parameters结构体成员见下表:
| 数据类型 | 成员 | 注释 |
|---|---|---|
| int32_t | raw_height | 摄像头输出RAW的高度 |
| int32_t | raw_width | 摄像头输出RAW的宽度 |
| int32_t | fps | 摄像头输出的帧率 |
S100芯片对于VPS输出的宽度是有对齐需求的,输出宽度需满足16对齐,输出高度需满足2对齐,如果您设置的宽度和高度不符合对齐要求,则会检测报错。
【返回类型】
成功返回 0,失败返回 -1
sp_open_vps
【函数原型】
int32_t sp_open_vps(void *obj, const int32_t pipe_id, int32_t chn_num, int32_t proc_mode, int32_t src_width, int32_t src_height, int32_t *dst_width, int32_t *dst_height, int32_t *crop_x, int32_t *crop_y, int32_t *crop_width, int32_t *crop_height, int32_t *rotate)
【功能描述】
打开一路图像处理模块,支持对输入的图像完成缩小、裁剪任务。
【参数】
obj: 已经初始化的VIO对象指针pipe_id:支持多次打开,通过pipe_id进行区分。chn_num:设置输出图像数量,最大为6,最小为1,与设置的目标高宽数组大小有关proc_mod:处理模式,当前支持:SP_VPS_SCALE仅缩放、SP_VPS_SCALE_CROP裁剪并缩放src_width:原始帧宽度src_height:原始帧高度dst_width:配置目标输出宽度的数组地址dst_height:配置目标输出高度的数组地址crop_x:裁剪区域的左上角x坐标集合,当proc_mod没有设置裁剪功能时,传入NULLcrop_y:裁剪区域的左上角y坐标集合,当proc_mod没有设置裁剪功能时,传入NULLcrop_width:裁剪区域的宽度,当proc_mod没有设置裁剪功能时,传入NULLcrop_height:裁剪区域的高度,当proc_mod没有设置裁剪功能时,传入NULLrotate:旋转角度集合,当前不支持旋转功能,需传入NULL
S100芯片对于VPS输出的宽度是有对齐需求的,输出宽度需满足16对齐,输出高度需满足2对齐,如果您设置的宽度和高度不符合对齐要求,则会检测报错。
【返回类型】
成功返回 0,失败返回 -1
sp_vio_close
【函数原型】
int32_t sp_vio_close(void *obj)
【功能描述】
根据传入的 obj 是打开的 camera 还是 vps决定关闭camera还是vps模块。
【参数】
obj: 已经初始化的VIO对象指针
【返回类型】
成功返回 0,失败返回 -1
sp_vio_get_frame
【函数原型】
int32_t sp_vio_get_frame(void *obj, char *frame_buffer, int32_t width, int32_t height, const int32_t timeout)
【功能描述】
获取指定分辨率的图像帧数据(分辨率在打开模块时需要传入,否则会获取失败)。返回数据格式为 NV12 的 YUV 图像。
【参数】
obj: 已经初始化的VIO对象指针frame_buffer:已经预分配内存的buffer指针,用于保存获取出来的图片,目前获取到的图像都是NV12格式,所以预分配内存大小可以由公式高 * 宽 * 3 / 2,也可以利用提供的宏定义FRAME_BUFFER_SIZE(w, h)进行内存大小计算width:image_buffer保存图片的宽,必须是在sp_open_camera或者sp_open_vps配置好的输出宽height:image_buffer保存图片的高,必须是在sp_open_camera或者sp_open_vps配置好的输出高timeout:获取图片的超时时间,单位为ms,一般设置为2000
【返回类型】
成功返回 0,失败返回 -1
sp_vio_get_raw
【函数原型】
int32_t sp_vio_get_raw(void *obj, char *frame_buffer, int32_t width, int32_t height, const int32_t timeout)
【功能描述】
获取摄像头的raw图数据
【参数】
obj: 已经初始化的VIO对象指针frame_buffer:已经预分配内存的buffer指针,用于保存获取出来的raw图,预分配内存字节大小可以由公式(高 * 宽 * 图像深度)/8计算得出width:获取raw图时传NULLheight:获取raw图时传NULLtimeout:获取图片的超时时间,单位为ms,一般设置为2000
【返回类型】
成功返回 0,失败返回 -1
sp_vio_get_yuv
【函数原型】
int32_t sp_vio_get_yuv(void *obj, char *frame_buffer, int32_t width, int32_t height, const int32_t timeout)
【功能描述】
获取摄像头的ISP模块的YUV数据
【参数】
obj: 已经初始化的VIO对象指针frame_buffer:已经预分配内存的buffer指针,用于保存获取出来的图片,目前获取到的图像都是NV12格式,所以预分配内存大小可以由公式高 * 宽 * 3 / 2,也可以利用提供的宏定义FRAME_BUFFER_SIZE(w, h)进行内存大小计算width:获��取ISP的YUV数据时传NULLheight:获取ISP的YUV数据传NULLtimeout:获取图片的超时时间,单位为ms,一般设置为2000
【返回类型】
成功返回 0,失败返回 -1
sp_vio_set_frame
【函数原型】
int32_t sp_vio_set_frame(void *obj, void *frame_buffer, int32_t size)
【功能描述】
在使用vps模块功能时,源数据需要通过调用本接口送入,frame_buffer里面的数据必须是 NV12 格式的图像数据,分辨率必须和调用sp_open_vps接口是的原始帧分辨率一致。
【参数】
obj: 已经初始化的VIO对象指针image_buffer:需要处理的图像帧数据,必须是NV12格式的图像数据,分辨率必须和调用sp_open_vps接口是的原始帧分辨率一致。size: 帧大小
【返回类型】
成功返回 0,失败返回 -1
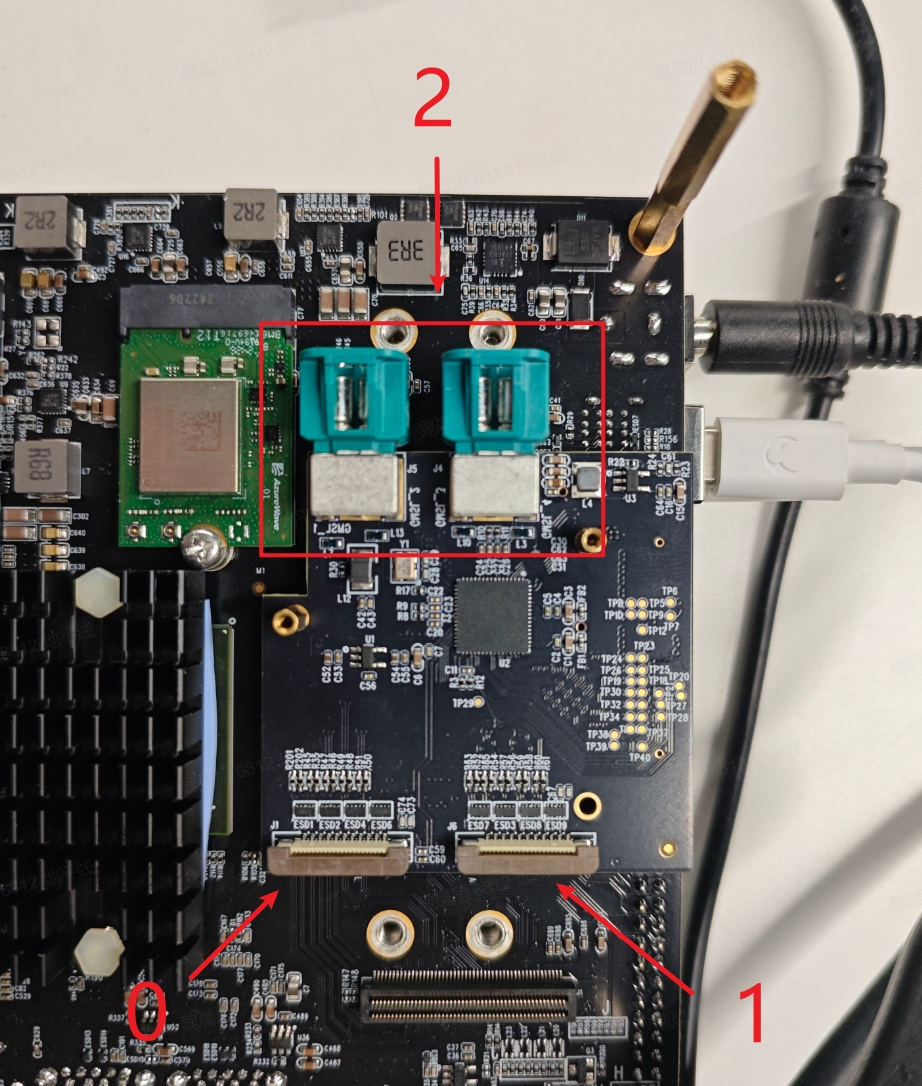
host编号选择
camera对应的host编号如下图所示