Camera点亮
HBN mipi sensor 点亮
范围
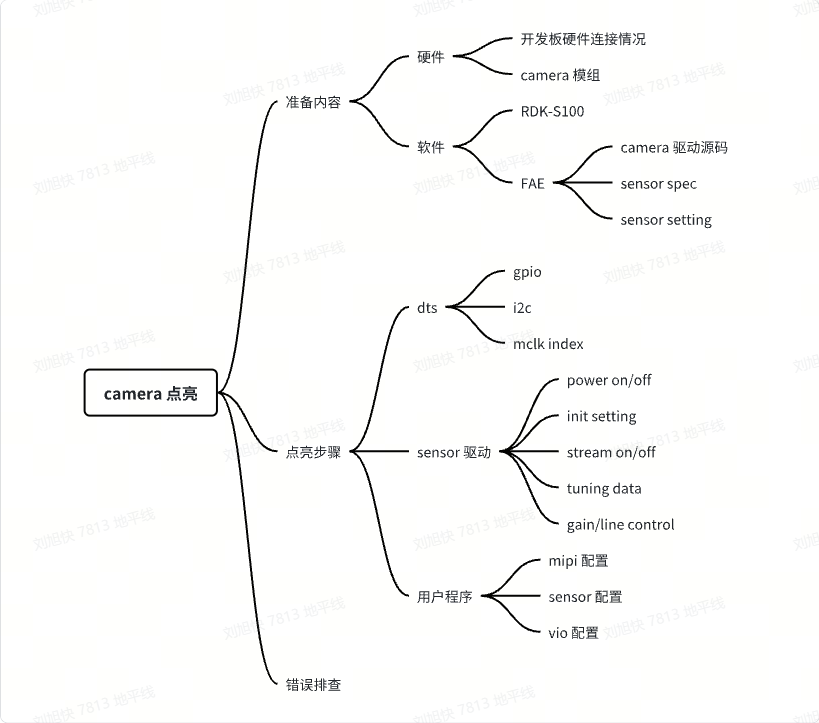
本章节概述了 RDK-S100 camera bring up 的过程,用于帮助读者快速了解并掌握 RDK-S100 camera 框架,如何快速的新增 camera 配置,并点亮 camera。
该部分内容以 RDK-S100 开发板 + imx219 camera
模组为例,进行配置讲解,其他硬件平台或者 camera 模组以实际情况为准。
准备工作
硬件资源:RDK-S100 开发板、camera 模组。
软件资源:系统 SDK、camera 驱动源码、sensor datasheet、sensor 的 initialize settings 等。
RDK-S100 开发板 camera 相关硬件资源如下:
| RDK-S100 | MIPI host | I2C | 管脚说明 | 管脚说明 | 其他 |
|---|---|---|---|---|---|
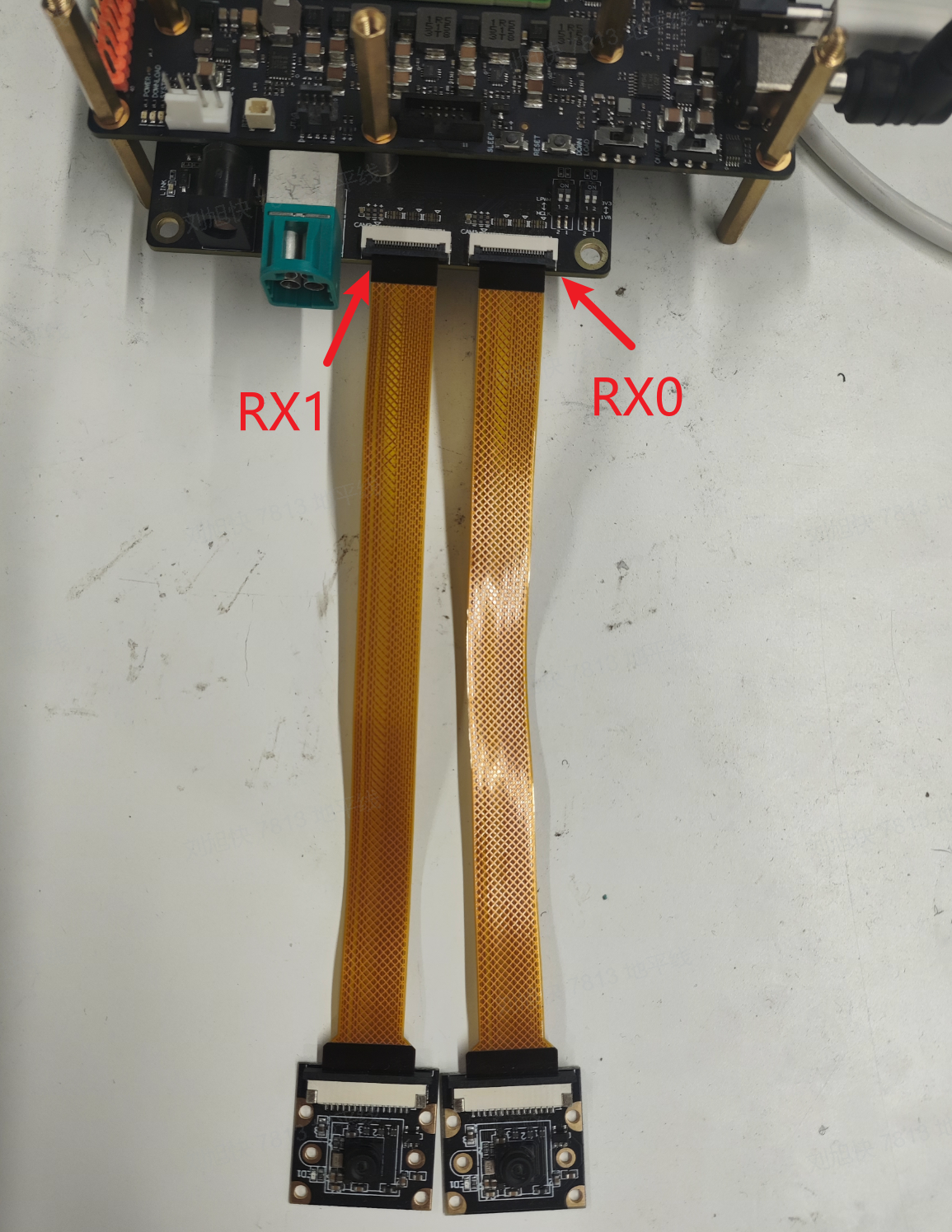
| RX0 可接 imx219 模组 | 0 4 lane | 1 | SPI1_CSN0 gpio_number:502 | 可通过拨码开关进行选择 • LPWM0_DOUT0 gpio_number:456 • mclk 24Mhz | 注意: imx219 模组本身外接 24M 晶振,所以不需要 SOC 端输出 mclk 注意:拨码开关决定输出 I2C/GPIO 电平 1.8V 还是 3.3V。 注意:拨码开关决定输出是 LPWM还是 24M mclk。 |
| RX1 可接 imx219 模组 | 1 4 lane | 2 | SD_WPROT gpio_number:494 | 可通过拨码开关进行选择 • LPWM0_DOUT1 gpio_number:457 • mclk 24Mhz | 注意: imx219 模组本身外接 24M 晶振,所以不需要 SOC 端输出 mclk 注意:拨码开关决定输出 I2C/GPIO 电平 1.8V 还是 3.3V。 注意:拨码开关决定输出是 LPWM还是 24M mclk。 |
| RX4 用于接 serdes | 4 4 lane | 3 | poc EN: gpio_number:433 poc INT: gpio_number:506 | 解串器 PWDNB: gpio_number:452 | 解串器 max96712, addr: 0x29 poc max20087, addr: 0x28 |
硬件连接示意图:
RX0 和 RX1 对应拨码开关示意图:


添加新 sensor 点亮步骤
RDK-S100 平台进行新硬件和新 camera 适配时,需要修改平台设备树 dts,camera 驱动库及相关配置文件即可,系统库一般无需改动。
dts 修改
sensor gpio 配置
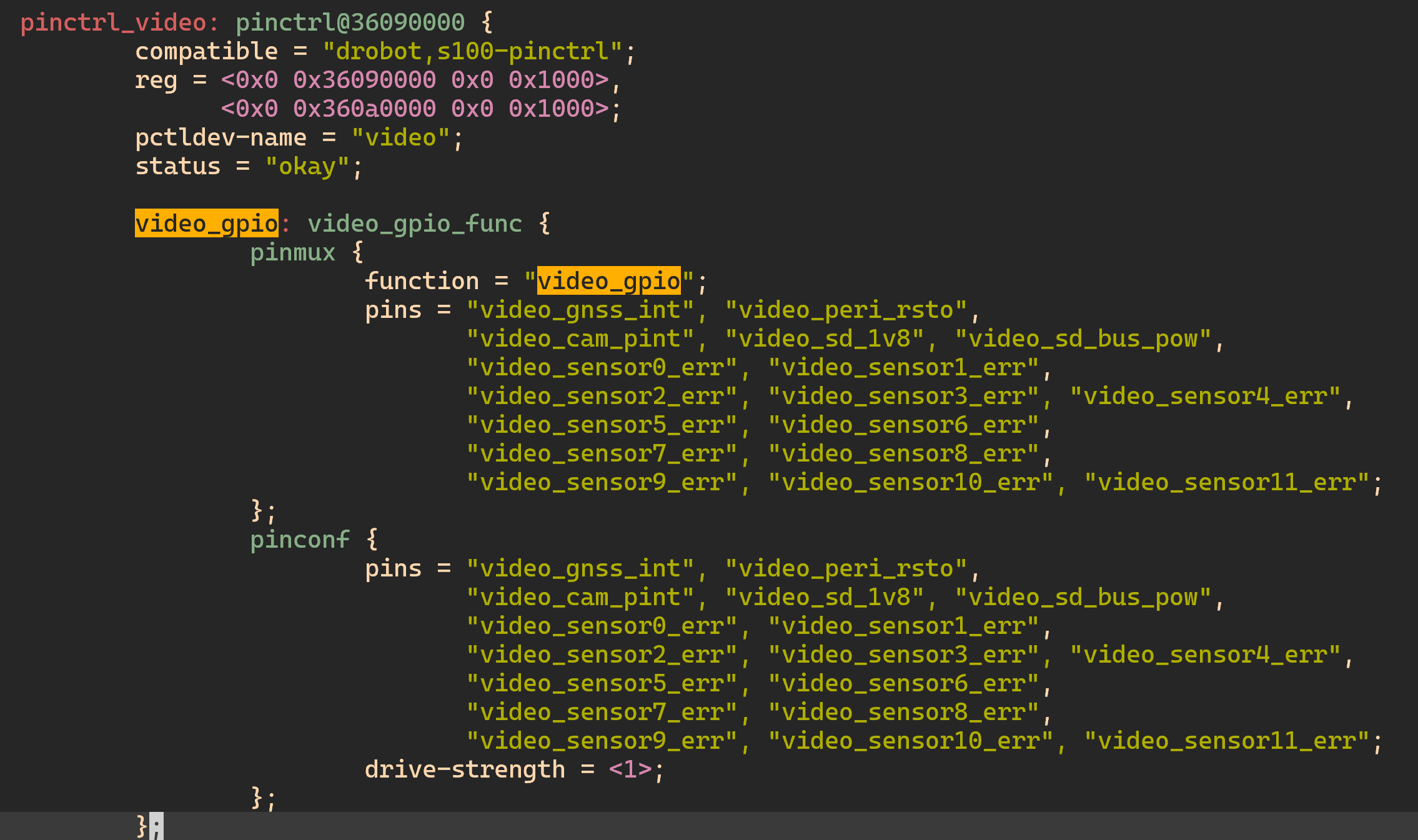
确保新硬件使用的 sensor gpio 在 drobot-s100-pinctrl.dtsi --> pinctrl_video --> video_gpio节点中有配置,这样在开机启动时,系统才会将对应的 pin 设置为 gpio,用户程序方可以操作 pin。
vcon 是 RDK-S100 camera 用于管理 sensor 硬件相关的 dts 节点,如果 sensor 需要对应的时序才能正常启动,则需要在该节点中配置对应的 gpio。请根据硬件连接的实际情况配置,该相关信息可以从原理图及 pin list 中获取。
// dts: 在对应 vcon node 中设置 gpio,注意 vcon 端口号与 mipi rx 端口号 一 一对应
// vcon0 -- RX0
// ....
// vcon3 -- RX3
&vin_vcon0 {
bus = <2>;
gpio_poc = <0>;
gpio_des = <0>;
sensor_err = <0>;
//gpio_oth = <444 445>; // imx219 无需配置,所以这里是注释掉,为空
lpwm_chn = <0 1 2 3>;
rx_phy = <2 0>;
};
sensor i2c 配置
I2C bus number 需要在 dts vcon 中与 MIPI RX 端口进行绑定,请根据硬件连接的实际情况配置,该相关信息可以从原理图中获取。
// 在对应 vcon 中设置 i2c bus,如 RX0 设置 I2C2
&vin_vcon0 {
bus = <2>;
gpio_poc = <0>;
gpio_des = <0>;
sensor_err = <0>;
lpwm_chn = <0 1 2 3>;
rx_phy = <2 0>;
};
mclk 配置
RDK-S100 底座硬件暂时不支持 SOC 输出的 mclk 连接到 sensor 模组,目前只支持外带晶振的模组。
dts 修改验证
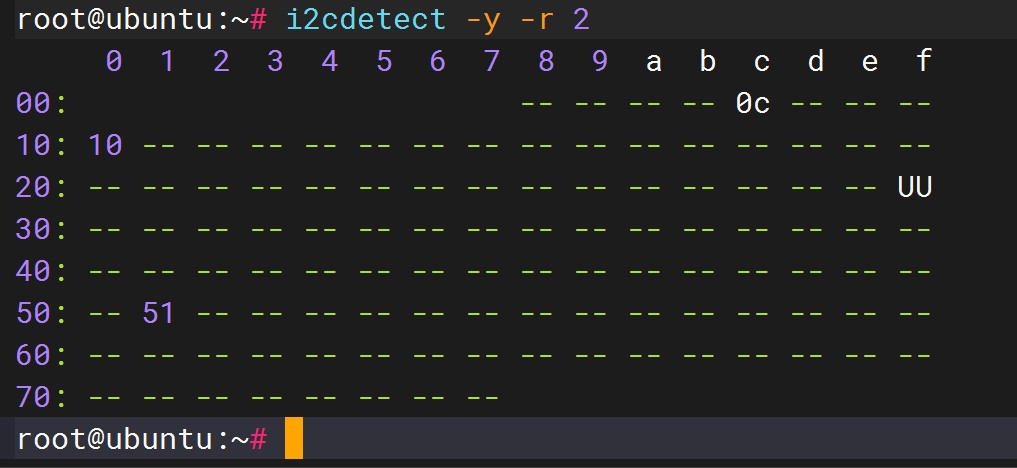
一般 dts 配置正确,硬件正确连接后,保证 sensor 供电及 mclk 正常 ,便可以使用 i2cdetect 检测到模组的 i2c 地址。 通过 echo 命令进行控制 sensor 上电或者 reset (注:该说明使用 imx219模组无需操作 gpio)
echo 502 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio502/direction
echo 1 > /sys/class/gpio/gpio502/value
echo 502 > /sys/class/gpio/unexport
使用 i2cdetect 检测 sensor i2c地址。如果检测到正确的地址,如下图所示,则表示 dts 配置正确,否则需要检查dts 配置。
 | 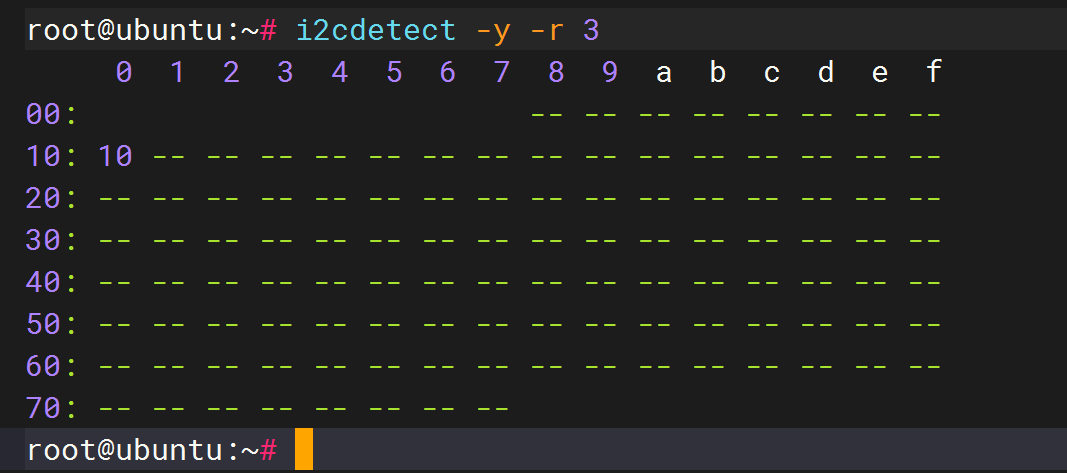 |
|---|
sensor 驱动文件添加
不同厂家的 sensor,都会搭配风格各异的 driver 和 setting。因此需要将原厂 sensor 驱动,转换成 RDK-S100 camera 驱动代码,并编译生成 so 库,然后将 so 库拷贝到设备的 /usr/hobot/lib/sensor/ 目录下。需要说明的是,在 mipi start 之前,必须保证 sensor 没有开流。
系统 SDK 目录 hobot-camera/drivers/sensor 下提供了 sensor 驱动模板文件 imx219_utility.c 以及适配过的其他 sensor 驱动,当添加新 camera sensor 支持时,可以仿照该部分文件进行修改。
#ifdef CAMERA_FRAMEWORK_HBN
SENSOR_MODULE_F(imx219, CAM_MODULE_FLAG_A16D8);
sensor_module_t imx219 = {
.module = SENSOR_MNAME(imx219),
#else
sensor_module_t imx219 = {
.module = "imx219",
#endif
.init = sensor_init,
.start = sensor_start,
.stop = sensor_stop,
.deinit = sensor_deinit,
.aexp_gain_control = sensor_aexp_gain_control,
.aexp_line_control = sensor_aexp_line_control,
.power_on = sensor_poweron,
.power_off = sensor_poweroff,
.userspace_control = sensor_userspace_control,
};
如上代码所示,RDK-S100 camera 框架下的 sensor 驱动接口包含在 sensor_module_t 的结构体中,文件名、结构体名和 module 字段要统一,例如文件名为 imx219_utility.c,那么结构体名和 module 字段要统一为 imx219。对于新 sensor 点亮,下列函数需要用户自行实现:
• init:sensor 初始化、setting 下发
• deinit:sensor 去初始化
• start:sensor 开流
• stop:sensor 关流
• power on: sensor 上电
• power off: sensor 下电
• aexp_gain_control: sensor gain 增益控制
• aexp_line_control: sensor line 曝光控制
• userspace_control: 用户回调功能开启控制
对于 3A 控制,系统支持驱动注册和应用层回调两种方式,默认使用应用层回调函数的方式,接口定义如下:
| 函数 | 功能 | 传入参数 |
|---|---|---|
| aexp_gain_control | sensor 增益控制 | info:sensor 总线信息 mode:senosr �运行模式;linear/hdr/pwl again:sensor again 参数,最大4个 dgain:sensor dgain 参数,最大4个 gain_num:sensor gain 参数个数 |
| aexp_line_control | sensor 曝光控制 | info:sensor 总线信息 mode:senosr 运行模式;linear/hdr/pwl line:sensor line 参数,最大4个 line_num:sensor line 参数个数 |
| awb_control | sensor 端 awb 控制 | info:sensor 总线信息; mode:senosr 运行模式;linear/hdr/pwl rgain:sensor rgain bgain:sensor bgain grgain:sensor rrgain gbgain:sensor gbgain |
| userspace_control | hal 层各类控制开关 | port:sensor 端口号 enable:使能用户回调控制开关,默认全部关闭。 位定义: #define HAL_LINE_CONTROL 0x00000001 #define HAL_GAIN_CONTROL 0x00000002 #define HAL_AWB_CONTROL 0x00000004 |
如下代码是对 sensor 驱动主要结构体的初始化,需要根据每个 sensor 的实际情况来对应填写
// sensor 实际输出的宽度
turning_data->sensor_data.active_width = 1920;
// sensor 实际输出的高度
turning_data.sensor_data.active_height = 1080;
// 每秒多少曝光行,计算公式为1/每行时间或者(fps*vts),其中vts在不同sensor的里面的名字可能有所不同,
//可能是frame_length、vts等,但含义都是每帧的所含的总共行数,
//包括有效行和blanking。lines_per_second 亦可以理解成HMAX,需要注意的是有些sensor 无HMAX 概念
turning_data.sensor_data.lines_per_second = vts * sensor_info->fps;
// 短曝光最大曝光时间(短曝光每帧最大曝光行数),短曝光每帧最大曝光行数可以通过公式
//单帧曝光时间/单行曝光时间,
//即(1/fps)/(1/lines_per_second)
turning_data.sensor_data.exposure_time_max = vts;
// a_gain最大倍数,举一个例子,turning_data.sensor_data.analog_gain_max =126,
//最大倍率计算公式就是2^(X/32),其中X就是126,X这个值每一个sensor厂家不一样,
//需要从sensor手册或者sensor厂家查找得到;最大倍率也可以这样得到:先获取sensor最大增益,
//然后查找J5-ISP的增益表,得到对应的索引值,该索引值就是最大倍率。
turning_data.sensor_data.analog_gain_max = 109;
turning_data.sensor_data.digital_gain_max = 0;
//短曝光最小曝光时间(短曝光每帧最小曝光行数),
//每行的曝光时间可以用公式1秒/(帧率*(有效行+blank))即1/lines_per_second推算得出
turning_data.sensor_data.exposure_time_min = 1;
//长曝光最大曝光时间(长曝光每帧最大曝光行数)
turning_data.sensor_data.exposure_time_long_max = vts;
// 填充 sensor 位宽data_width、bayer_start(RGGB pattern start (R/Gr/Gb/B))、
// bayer_pattern(RGGB/RCCC/RIrGB/RGIrB) 信息
sensor_data_bayer_fill(&turning_data.sensor_data, 10, (uint32_t)BAYER_START_R, (uint32_t)BAYER_PATTERN_RGGB);
// 填充 exposure_max_bit_width(pwl mode bits ) 信息
sensor_data_bits_fill(&turning_data.sensor_data, 12);
// setting stream ctrl
// 开流、关流
turning_data.stream_ctrl.data_length = 1;
// again lut表,fireware根据index索引lut表,查找sensor对应的寄存器值,lut表区分a_gain/d_gain,
// lut表格大小:again_lut[again_control_num][256], dgain_lut[dgain_control_num][256]
turning_data.normal.again_lut = malloc(256 * sizeof(uint32_t));
if (turning_data.normal.again_lut != NULL)
{
memset(turning_data.normal.again_lut, 0xff, 256 * sizeof(uint32_t));
memcpy(turning_data.normal.again_lut, imx219_gain_lut,
sizeof(imx219_gain_lut));
}
turning_data.normal.dgain_lut = malloc(256*sizeof(uint32_t));
if (turning_data.normal.dgain_lut != NULL) {
memset(turning_data.normal.dgain_lut, 0xff, 256*sizeof(uint32_t));
memcpy(turning_data.normal.dgain_lut, imx219_dgain_lut,
sizeof(imx219_dgain_lut));
}
• turning_data.sensor_data.active_width:sensor 实际输出的宽度。
• turning_data.sensor_data.active_height:sensor 实际输出的高度。
• turning_data.sensor_data.analog_gain_max:a_gain 最大倍数,举一个例子,turning_data.sensor_data.analog_gain_max =126,最大倍率计算公式就是2^(X/32),其中 X 就是 126,X这个值每一个 sensor 厂家不一样,需要从 sensor 手册或者 sensor 厂家查找得到。
• turning_data.sensor_data.digital_gain_max:d_gain 最大倍数。
• turning_data.sensor_data.exposure_time_min:短曝光最小曝光时间(短曝光每帧最小曝光行数),每行的曝光时间可以用公式1秒/(帧率*(有效行+blank))即1/lines_per_second推算得出。
• turning_data.sensor_data.exposure_time_max:短曝光最大曝光时间(短曝光每帧最大曝光行数),短曝光每帧最大曝光行数可以通过公式单帧曝光时间/单行曝光时间,即(1/fps)/(1/lines_per_second)。
• turning_data.sensor_data.exposure_time_long_max:长曝光最大曝光时间(长曝光每帧最大曝光行数),HDR sensor 会用到。
• turning_data.sensor_data.lines_per_second:每秒多少曝光行,计算公式为1/每行时间或者(fps*vts),其中vts在不同 sensor 的里面的名字可能有所不同,可能是frame_length、vts等,但含义都是每帧的所含的总共行数,包括有效行和 blanking。lines_per_second 亦可以理解成HMAX,需要注意的是有些 sensor 无 HMAX 概念。
• turning_data.normal.again_lut:again lut 表,fireware 根据 index 索引 lut 表,查找 sensor 对应的寄存器值,lut 表区分 a_gain/d_gain,lut 表格大小:again_lut[again_control_num][256], dgain_lut[dgain_control_num][256]。
注意事项1:当某个 gain 值不存在时,该位填充 0xffffffff,分配 gain 时,程序会向下查找,直到可以查到可以分配的 gain,下发到 kernel 中的 lut 表需要是完成高低位转换,避免在 kernel 中进行,比如gain = 0x1234,写入寄存器 0x3012,0x3013,有些 sensor 在 0x3012 中写 0x12,有些 sensor 在 0x3013 中写 0x12,在 hal 中转换屏蔽该差异性;
注意事项2:lut 表示 [0,255] 共 256 gain 控制,转换公式为 2^(x/32),即实际的 gain 倍数为[2^(0/32),2^(255/32)], gain 的控制曲线为 log 类型,即任何一颗 sensor 的 gain 的控制被离散为 256 个控制点,原因是现在 3a 的控制算法给出 256 个控制点,给出更多的控制点并不会提高 gain 的控制精度
camera 在 mipi start 之前,需要保证 sensor 没有开流,在 camera sensor init settings 中进行更改。
static uint32_t imx219_linear_init_setting[] = {
....
// 0x0100,0x01, // 在 setting 最后不包含 开流 的配置
}
当 sensor 驱动和 setting 编写完成后,拷贝 *_utility.c 和 *_setting.h 到 SDK 对应目录中,并重新编译 SDK 生成 sensor 驱动库,生成文件位于 out/deploy/rootfs/usr/hobot/lib/sensor 中。
一般代码结构没有问题,即使 tuning_data 参数配置有不当的地方,框架也能正常加载 sensor驱动。如果 logcat 有 sensor so check 失败或者加载失败,则需要检查代码结构,是否按照 HBN 框架来编写。
用户程序
参考 SDK 已有的用户程序,包含 CIM、ISP 的参数配置,这些配置需要根据具体的 sensor 的分辨率,帧率,数据格式进行配置。下面列出文件中需要单独配置的部分,其余部分可保持默认值,无需关注。
mipi 配置
| 字段 | 描述 |
|---|---|
| rx_enable | MIPI 接收(RX) 设备使能,使能对应的 MIPI RX 端口,默认填 1。 注意 该字段不是配置 MIPI RX 端口号,只是使能 MIPI RX。 |
| phy | 0: 代表 mipi dphy。 |
| lane | mipi lane 数,目前每一个 MIPI RX 默认支持 4 lane。 |
| datatype | mipi 输入的数据格式,与 sensor 配置保持一致。 常见的如下: RAW8:0x2A RAW10: 0x2B RAW12: 0x2C YUV422 8-bit: 0x1E |
| fps | 帧率,供计算 MIPI 一些配置使用,按照 sensor 输出帧率填写即可,可从 FAE 获取。 |
| mipiclk | mipi 总传输率 (所有 LANE),可从 FAE 获取,一般 FAE 提供 sensor init setting 时有描述。 |
| width | 输入图像 宽度 piexl。 |
| height | 输入图像 高度 piexl。 |
| linelenth | mipi linelenth, 根据 sensor 实际情况配置,可从sensor spec 寄存器读取,或者实际硬件测量。 |
| framelenth | mipi framelenth, 根据 sensor 实际情况配置,可从sensor spec 寄存器读取,或者实际硬件测量。 |
| settle | mipi settle, phy 的 settle 时间配置,可实际硬件测量。报 mipi phy 错时可调整, 0 - 120 范围。 |
| channel_num | mipi 虚拟通道 number,linear mode 填 1,HDR DOL2 mode 填 2。 |
| channel_sel[MIPIHOST_CHANNEL_NUM] | mipi 虚拟通道对应的 ipi channel。 |
商业版提供更完整的功能支持、更深入的硬件能力开放和专属的定制内容。为确保内容合规、安全交付,我们将通过以下方式开放商业版访问权限。
商业版本获取流程:
- 填写问卷:提交您的机构信息、使用场景等基本情况
- 签署保密协议(NDA):我们将根据提交信息与您联系,双方确认后签署保密协议
- 内容释放:完成协议签署后,我们将通过私有渠道为您开放商业版本资料
如您希望获取商业版内容,请点击下方链接填写问卷,我们将在 3 ~ 5 个工作日内与您联系: https://horizonrobotics.feishu.cn/share/base/form/shrcnpBby71Y8LlixYF2N3ENbre
camera sensor 配置
| 字段 | 描述 |
|---|---|
| name[CAMERA_MODULE_NAME_LEN] | camera 模组名称,需要和 sensor lib名称对应,如:sensor 驱动名称为:libimx219.so,那么 name 为 imx219 |
| addr | sensor 设备地址,一般是 i2c 7位地址。 |
| sensor_mode | sensor 工作模式: 1:NORMAL_M,linear 模式 2:DOL2_M,hdr 2帧合成1帧 3:DOL3_M,hdr 3帧合成1帧 4: DOL4_M,hdr 4帧合成1帧 5: PWL_M,hdr 模式 sensor 内部合成 |
| gpio_enable | 是否使用 gpio 控制 camera sensor 的引脚,以满足 sensor 上下电的时序要求。如:使用 gpio 来控制 sensor XSHUTDN 引脚。注意:需要在 dts 中配置对应的 gpio number。 0: 不使用 gpio 来控制。 非 0: 使用 gpio 来控制 sensor,按照 bit 来使能 gpio 数量。 比如: 0x07 则代表使能 [a, b, c] 3 个 gpio。 |
| gpio_level | 如果选择 gpio_enable_bit,则可以配置 gpio_level 来控制 sensor 引脚高低电平。某个 gpio bit 与 sensor 管脚高低电平关系如下: 0: 先输出低电平,sleep 1s (休眠时间可以在 sensor 驱动文件 power_on 函数中,通过 usleep 自行定义),再输出高电平。 1: 先输出高电平,sleep 1s,再输出低电平 比如:0x05 = 101,从 bit0 到 bit2 分别代表 gpio a 先输出高电平,再输出低电平,gpio b 先输出低电平,再输出高电平,gpio c 先输出高电平,再输出低电平。 注意:需要根据 sensor spec 上电时序来自定义。 |
| fps | sensor 帧率配置 |
| width | sensor 出图宽度 pixel |
| height | sensor 出图高度 piexl |
| format | sensor mipi 数据类型,常见的如下: RAW8:0x2A RAW10: 0x2B RAW12: 0x2C YUV422 8-bit: 0x1E |
| extra_mode | 模组索引配置,部分 sensor 驱动中会用到 |
| config_index | 功能配置,部分 sensor 驱动中会用到 |
| calib_lname | sensor 效果库路径,默认路径为 /usr/hobot/lib/sensor |
| end_flag | 固定为 CAMERA_CONFIG_END_FLAG |
vio 配置
| 字段1 | 字段2 | 字段3 | 描述 |
|---|---|---|---|
| VIN | cim | mipi_en | 使能 mipi 接口 |
| mipi_rx | mipi rx 端口号 | ||
| vc_index | mipi virtual index,mipi 虚拟通道,默认填写 0 即可 | ||
| ipi_channel | ipi channel number,linear mode 为 1, hdr mode dol2 为 2 | ||
| cim_isp_flyby | cim/sif online 到 isp。 0: sif offline 到 isp,数据经过 ddr。 1:sif online 到 isp,数据不经过 ddr。 | ||
| input channel | format | vin format,sensor 输出 format | |
| width | sensor 输出分辨率 宽度 pixel | ||
| height | sensor 输出分辨率 高度 pixel | ||
| output channel / ddr | ddr_en | 数据是否 dump 到 DDR | |
| wstride | 设置为 0,驱动会自动计算 wstride。 | ||
| format | 下 ddr 时,设置的 sensor format | ||
| buffers_num | cim/sif 下 ddr 的buffer number,设置为 1 - 6 | ||
| flags | 一般在程序设置 | ||
| HB_MEM_USAGE_CPU_READ_OFTEN | HB_MEM_USAGE_CPU_WRITE_OFTEN | HB_MEM_USAGE_CACHED | |||
| ISP | base | hw_id 和 slot_id | CIM 硬件直连 ISP 情况: hw_id 需要与 cim 的 rx_index 一一对应。 在sched_mode配置为1的情况下,CIM online ISP slot_id 取值0 ~ 3,与cim vc_index一一对应。 在sched_mode配置为2的情况下,slot_id 固定为0,cim vc_index可视sensor实际接入情况设置为0 ~ 3。 CIM DDR 连接 ISP 情况: hw_id 无限制,可视 sensor 实际接入情况和项目需要选择hw_id。 slot id只需从4开始到11即可。 注意:在多路压力场景下,采用CIM DDR的连接方式情况时,大分辨率的sensor通路�连接尽量选择slot id取值较小的ISP通道上,可保证对sensor实时控制。 |
| sched_mode | ISP的工作模式, 1: 表示manual,软件调度的方式, 2: 表示passthru模式,全online独占ISP的工作模式。 | ||
| width | 输入图像高度 | ||
| height | 输入图像宽度 | ||
| frame_rate | 输入帧率,无实际效果 | ||
| algo_state | 2a 的开关参数 | ||
| output channel | stream_output_mode 和 axi_output_mode | isp 模式 |
板端运行程序
执行对应的测试程序
isp 图像预览
SDK 代码添加 tuning 程序
修改 /app/tuning_tool/scripts/tuning_menu.sh 文件,仿照已有的 sensor,进行添加。
ITEM_IMX219_RGGB="module:Raw10_IMX219_RDK-S100"
IMX219_RGGB_Raw10_IMX219_RDK-S100()
{
IDESC="imx219 rggb raw10 RDK-S100"
setup_case ${folder}/tuning_imx219_cim_isp_1080p
}
在 /app/tuning_tool/cfg/matrix 目录下建立 tuning_imx219_cim_isp_1080p 文件夹,并添加对应的 hb_j6dev.json mipi.json vpm_config.json 三个文件。
编译 SDK 系统代码,确保板端已经包含修改和添加的文件。
板端执行 tuning 程序
cd /app/tuning_tool/scripts
bash run_tuning.sh
# 按照交互页面提示,选择对应的 sensor
图像预览
-
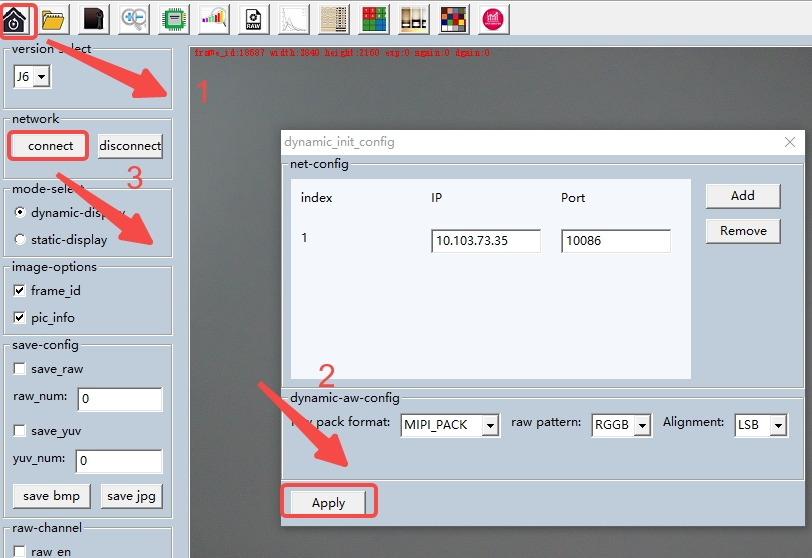
点击此处下载图像浏览工具 hbplayer。
-
打开 hbplayer 并设置网络地址(PC需要与板子可以ping通),点 apply 设置生效,并点 connect 则可以看到实时视频流。实时预览操作示意如图所示。
错误码
下面是 sensor 常见的错误码及简单的排查方向:
| 错误码 | 定义 | 排查方向 |
|---|---|---|
| 203 | HB_CAM_INIT_FAIL | sensor 初始化失败,一般可能 i2c 不通,配置的 sensor mode 不支持 |
| 205 | HB_CAM_START_FAIL | sensor 启动失败,一般可能 i2c 不通,配置的 sensor mode 不支持 |
| 207 | HB_CAM_I2C_WRITE_FAIL | sensor i2c �不通。 |
| 217 | HB_CAM_SENSOR_POWERON_FAIL | sensor 上电失败,可能是 sensor gpio 配置错误。 |
| 218 | HB_CAM_SENSOR_POWEROFF_FAIL | sensor 下电失败,可能是 sensor gpio 配置错误。 |
FAQ
control-tool 使用说明
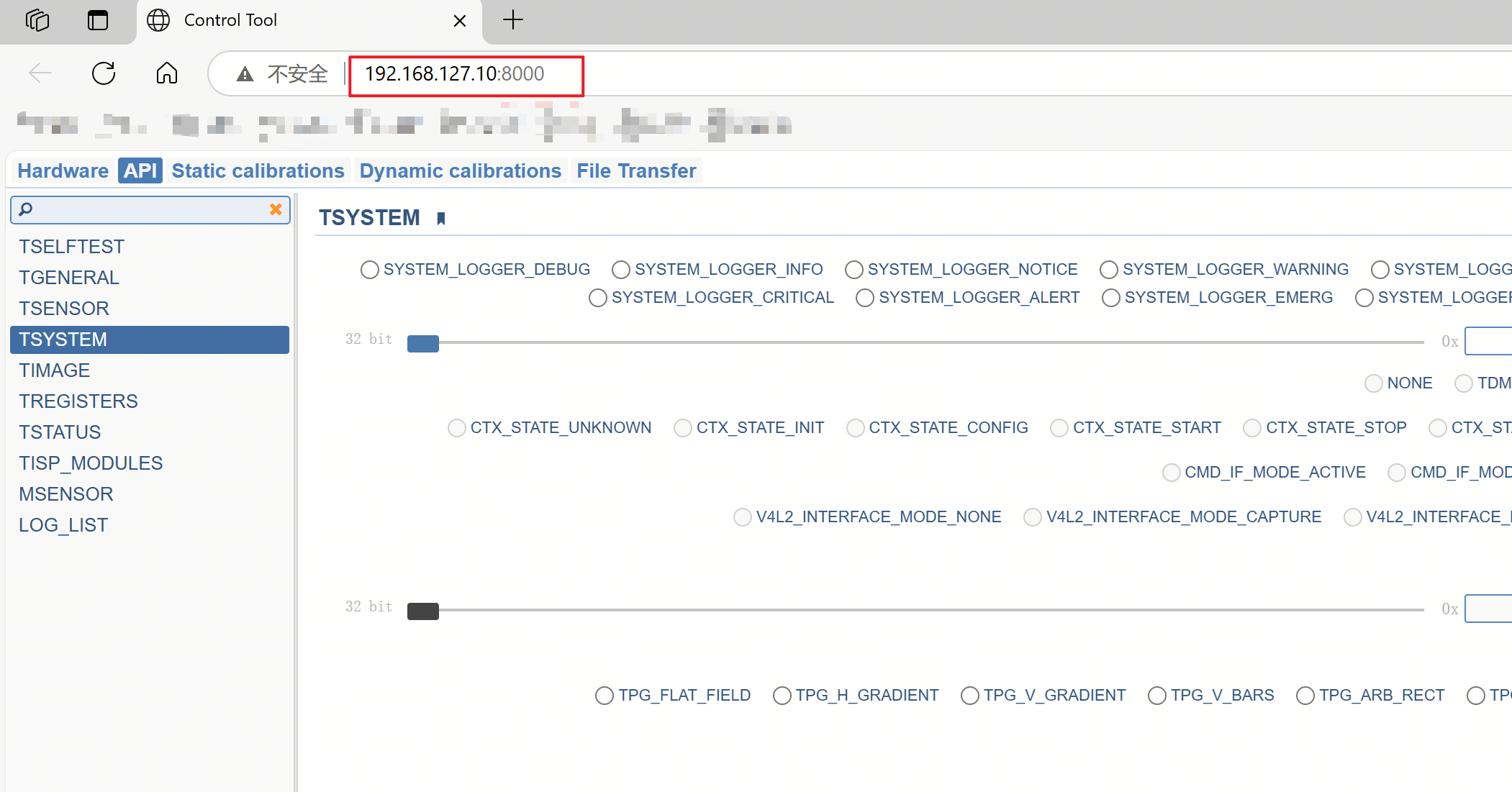
进入tuning 目录,cd /app/tuning_tool/control_tool
按照交互界面提示,执行启动脚本 sh server_isp*_8000.sh,ISP 硬件具有两个 IP 核,每个核可以单独运行,若需要启动 isp 的控制则运行脚本 sh server_isp0_8000.sh.
启动方式如图所示。

脚本会自动识别板子ip, 默认检查eth1网卡ip地址。若需要修改为启动eth0 网卡,修改脚本eth_id=eth0。修改位置如图所示。
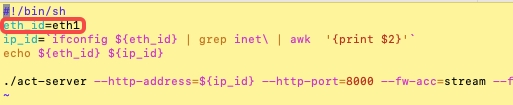
修改通信地址示意图
HBN gmsl sensor 点亮
gmsl sensor驱动编写说明
本章节在 mipi camera 点亮说明的基础上,增加 gmsl 的差异部分。需要读者对 mipi camera 点亮说明及 gmsl 有一定的了解。
该部分内容以 RDK-S100 开发板 + AR0820 (SG8S-AR0820C-5300-G2A) 模组为例,进行讲解,其他硬件平台或者 camera 模组以实际情况为准。
资源准备
硬件资源:RDK-S100 开发板、camera 模组。
软件资源:系统 SDK、camera 驱动源码、sensor datasheet、sensor 的 initialize settings 、serdes datasheet 等。
RDK-S100 开发板 camera 相关硬件资源参考 mipi camera 对应部分即可,下面图片用于表示解串器的 port 顺序。

添加新 sensor 点亮步骤
参考 mipi camera 点亮步骤,这里只说明差异部分。
dts 修改
- sensor mclk 配置,GMSL sensor mclk 一般由加串器输出,HBN 需要在 sensor 驱动代码中配置,后面介绍 sensor 驱动文件时,将详细说明。
- gpio_poc,gpio_des��,lpwm_chn 及其他 vcon 配置,如果使用 RDK-S100 硬件,也不用关注,目前 dts 已经配置完毕,仅在使用新硬件情况下,需要根据实际硬件情况进行修改,修改方式与 MIPI camera 一致。
sensor 驱动文件添加
代码位置:
sensor 驱动目录:hobot-camera/drivers/sensor
ar0820 驱动目录:hobot-camera/drivers/sensor/ar0820std
serial 驱动目录:hobot-camera/drivers/sensor/serial
deserial 驱动目录:hobot-camera/drivers/deserial
GMSL camera sensor 驱动需要实现的内容和 mipi 驱动类似,这里以 ar0820std 为例,解释差异部分。
其中 std 是HBN 后期重构的,长期维护的 sensor 驱动,所以建议参考 std 驱动,增加新模组配置。
static emode_data_t emode_data[MODE_TYPE_MAX] = {
...
[SENSING_M25F120D4G3_S0R0T7] = {
.serial_addr = 0x40, // serial i2c addr
.sensor_addr = 0x10, // sensor i2c addr
.eeprom_addr = 0x50, // eeprom i2c addr
.serial_rclk_out = 0, // 0: serial rclk disabl, 1: serial_rclk enable
.rclk_mfp = 0, // if serial_rclk_out = 1, the rclk output on rclk_mfp
},
};
通常一个解串器会连接多个加串器和 sensor,而这些加串器和sensor,可能是相同的硬件,i2c 地址相同,为了区分各个加串器和 sensor,需要对其 i2c 地址进行重新映射。emode_data 中的 *_addr 是在 i2c 地址重新映射 过程中,提供器件的默认 i2c 地址。映射的新地址,将由应用程序中 *_addr 自定义。
在 serdes 模组中,sensor 需要的 mclk 可以由加串器来提供,也可以是外部晶振提供。前者情况需要将 serial_rclk_out 配置为 1,且 rclk_mfp 配置为对应的 mfp index,目前软件只配置了 MFP4,其他情况请咨询地瓜人员。后者情况将 serial_rclk_out 和 rclk_mfp 都配置为 0 即可。
emode (extra_mode) 配置
static const sensor_emode_type_t sensor_emode[MODE_TYPE_NUM] = {
SENSOR_EMADD(SUNNY_M25F120D12G3_S1R8T2, "0.0.1", "lib_CA82GB_pwl12_WS_Fov120.so", "0.22.10.20", &emode_data[SUNNY_M25F120D
12G3_S1R8T2]),
SENSOR_EMADD(SENSING_M27F120D12G3_S0R0T7, "0.0.1", "lib_ar0820RGGB_pwl12_Sens_Fov30.so", "0.22.9.13", &emode_data[SENSING_
M27F120D12G3_S0R0T7]),
SENSOR_EMADD(SUNNY_M25F120D12G3_S0R8T7E0, "0.0.1", "lib_CA82GB_pwl12_WS_Fov120.so", "0.22.10.20", &emode_data[SUNNY_M25F12
0D12G3_S0R8T7E0]),
SENSOR_EMADD(GALAXY_M25F120D12G2_S1R5T3E0, "0.0.1", "lib_CW_A82GB_A120_065_L_W20.so", "0.24.4.24", &emode_data[GALAXY_M25F
120D12G2_S1R5T3E0]),
SENSOR_EMADD(GALAXY_M25F30D12G2_S1R5T3E0, "0.0.1", "lib_CW_A82GB_A30_017_L_W20.so", "0.24.4.28", &emode_data[GALAXY_M25F30
D12G2_S1R5T3E0]),
//D4: YUV422, S0: MAX9295A, R0: sensor module isp reset MFP0 T7: sensor frame sync MFP7
SENSOR_EMADD(SENSING_M25F120D4G3_S0R0T7, "0.0.1", "lib_ar0820RGGB_pwl12_Sens_Fov30.so", "0.22.9.13", &emode_data[SENSING_M
25F120D4G3_S0R0T7]),
SENSOR_EMEND(),
};
在 HBN 代码中,将利用类似 SENSING_M25F120D4G3_S0R0T7 的 emode 字段,来解析出模组的基本信息,所以这个字段,需要根据模组实际情况填写,解析的基本规则如下: 第一个 “” 前面是模组厂名称,可以自定义。 第一个 “” 后面将根据关键字符进行解析
- M:加串器给 sensor 输出 mclk 的频率,单位为 MHZ,如 M25,且 serial_rclk_out 及 rclk_mfp 使能且配置正确后,加串器将输出 25Mhz 的 mclk。
- F:为模组 lens 的 FOV 大小,一般为了方便驱动中根据不同 lens 做一些逻辑判断。
- S:用于区分加串器类型,S0 代表 MAX9295A,S1 代表 MAX96717, S2 代表 MAX96717F
- D:用于区分 sensor 输出的 datatype,D4 代表 YUV422(mipi 类型为 0x1e),D8 代表 RAW8 (mipi 类型为 0x2a),D10 代表 RAW10 (mipi 类型为 0x2b),D12 代表 RAW12 (mipi 类型为 0x2c)
- N:用于配置加串器 mipi lane 的数目,默认为 4 lane。
- R:用于配置加串器 reset sensor 或者模组内部 ISP 等器件。如 R0,则代表加串器使用 MFP0 gpio 进行 reset。
- T:用于配置加串器触发 sensor 同步曝光。如 T7,则代表加串器使用 MFP7 去触发 sensor 进行同步曝光。
- L:用于配置加串器 link 速率,可以选择 3Gbps 或者 6Gbps,需要根据实际硬件配置来选择。如 L3,则代表选择 3Gbps。如果没有配置,则软件中根据加串器型号自动配置其支持的最大速率。
- I:用于表示 sensor 的接口,是否为 DVP 接口。如 I1,则表示 sensor 与加串器的接口为 DVP 接口,I0 或者不配置,则为 MIPI 接口。
- 其他字符的解析,一般用不到,特殊情况,可以咨询地瓜人员。
"0.0.1" 和 "0.22.9.13" 分别为 sensor 驱动版本号及 isp 效果库 so 的版本号,前期点亮阶段,可以忽略。
"lib_ar0820RGGB_pwl12_Sens_Fov30.so" 为选择 emode 的默认 isp 效果库 so,需要注意的是,在用户程序中,也可以通过 calib_lname 指定效果库名称,且优先级高于 emode 中的配置。
config_index 配置 HBN 框架通过 config_index 字段来配置一些功能,如写一些 emb data,配置mirror/flip,设置sensor 曝光等。
static SENSOR_CONFIG_FUNC sensor_config_index_funcs[B_CONFIG_INDEX_MAX] = {
[B_EMBEDDED_MODE] = sensor_config_index_embed_setting,
[B_TEST_PATTERN] = sensor_config_index_test_pattern,
[B_FLIP] = sensor_config_index_filp_setting,
[B_MIRROR] = sensor_config_index_mirror_setting,
[B_TRIG_STANDARD] = sensor_config_index_trig_mode,
[B_TRIG_SHUTTER_SYNC] = sensor_config_index_trig_shutter_mode,
};
typedef enum CONFIG_INDEX_B {
B_AE_DISABLE,
B_AWB_DISABLE,
B_TEST_PATTERN,
B_DPHY_PORTB,
B_DPHY_COPY,
B_EMBEDDED_MODE,
B_EMBEDDED_DATA,
B_TRIG_SOURCE,
B_TRIG_STANDARD,
B_TRIG_SHUTTER_SYNC,
B_TRIG_EXTERNAL,
B_DUAL_ROI,
B_MIRROR,
B_FLIP,
B_PWL_24BIT,
B_CONFIG_INDEX_MAX,
} camera_sensor_config_index_t;
在用户程序中,将有 config_index 字段,表示模组选择哪一些功能,对应的赋值则是按照 1 << CONFIG_INDEX_B 值来配置,如,选择 B_TRIG_STANDARD,则 config_index 赋值为 256。
用户程序
该部分可以参考 mipi camera 配置,侧重于 deserial 的一些配置说明。这里的 deserial 字段为一些常用的配置。
deserial 配置
| 字段 | 描述 |
|---|---|
| name[CAMERA_MODULE_NAME_LEN] | deserial 名称,如 max96712 |
| addr | deserial 设备地址 |
| gpio_mfp[CAMERA_DES_GPIO_MAX] | MFP 的 GPIO功能选择,常见的 CAMERA_DES_GPIO_TRIG0 = 0, CAMERA_DES_GPIO_TRIG1 = 1, CAMERA_DES_GPIO_TRIG2 = 2, CAMERA_DES_GPIO_TRIG3 = 3, 如 .gpio_mfp[CAMERA_DES_GPIO_TRIG0] = 5, 则表示 SOC 输出的 LPWM 触发信号,连接到了解串器 MFP5 管脚上。 |
| link_desp[CAMERA_DES_LINKMAX][CAMERA_DES_PORTDESP_LEN] | 各Link连接模组的配置描述,多进程需要使用,单进程可选。格式为:name:extra_mode@config_index 如: strcpy(g_deserial_config[0].link_desp[0], "ar0820std:5@256"); 则代表:port0 选择的��为 ar0820 模组,emode 为 5, config_index 为 256。 |
| poc_cfg_t | 参见 poc 配置 |
| mipi_config_t | 参见 mipi camera 对应的配置,注意 extra_mode 和 config_index 配置。 |
| end_flag | 固定为 DESERIAL_CONFIG_END_FLAG |
poc 配置
| 字段 | 描述 |
|---|---|
| name[CAMERA_MODULE_NAME_LEN] | poc 名称,如:max20087 |
| addr | poc 设备 i2c 地址 |
| poc_map | poc 与 link 的 map 关系,需要根据硬件原理图来进行配置,SDK 硬件为:0x1320 |
| end_flag | 固定为 POC_CONFIG_END_FLAG |
板端运行程序,isp 图像预览等部分请参考 mipi camera 点亮说明。
V4L2 sensor 点亮
V4L2 sensor驱动编写说明
S100 Camsys sensor v4l2 驱动软件框架为标准的v4l2 sub device驱动。
 下面以IMX219驱动为例,介绍MIPI直连sensor v4l2 驱动开发流程,imx219驱动源码位于:kernel/drivers/media/i2c/imx219.c
下面以IMX219驱动为例,介绍MIPI直连sensor v4l2 驱动开发流程,imx219驱动源码位于:kernel/drivers/media/i2c/imx219.c
####定义sensor私有结构体 imx219私有结构体如下:
struct imx219 {
struct v4l2_subdev sd;
struct media_pad pad;
struct i2c_client *i2c_client;
...
struct v4l2_ctrl *xxx_ctrl;
...
};
sd: v4l2 sub device 句柄,用于操作subdev ops; pad: media pad,用于和后级模块建立media链接关系; i2c_client: i2c client 句柄,用来通过i2c总线与sensor交互; xxx_ctrl: v4l2控制属性,例如exposure、flip、blank控制,非必须实现;
V4L2回调函数实现
符合v4l2标准的sensor驱动需要实现一些ops函数,V4L2框架会通过ops函数控制sensor
static const struct v4l2_subdev_ops imx219_subdev_ops = {
.core = &imx219_core_ops,
.video = &imx219_video_ops,
.pad = &imx219_pad_ops,
};
实现v4l2 subdev ops回调,其中包含core ops、video ops、pad ops。
static const struct v4l2_subdev_pad_ops imx219_pad_ops = {
.enum_mbus_code = imx219_enum_mbus_code,
.get_fmt = imx219_get_pad_format,
.set_fmt = imx219_set_pad_format,
.enum_frame_size = imx219_enum_frame_size,
};
pad ops定义了一些格式配置、格式协商的回调接口,必须实现。
static const struct v4l2_subdev_video_ops imx219_video_ops = {
.s_stream = imx219_set_stream,
};
video ops主要定义了sensor开关流的接口,必须实现。
static const struct v4l2_subdev_core_ops imx219_core_ops = {
.subscribe_event = v4l2_ctrl_subdev_subscribe_event,
.unsubscribe_event = v4l2_event_subdev_unsubscribe,
};
core ops定义了一些如ioctl event实现等,可选实现。
static const struct v4l2_subdev_internal_ops imx219_internal_ops = {
.open = imx219_open,
};
internal ops主要定义了一些ops用于管理子设备的生命周期,按需实现open、close、release等回调。
sensor probe函数
static int imx219_probe(struct i2c_client *client)
{
imx219 = devm_kzalloc(&client->dev, sizeof(*imx219), GFP_KERNEL); // 1
if (!imx219)
return -ENOMEM;
...
v4l2_i2c_subdev_init(&imx219->sd, client, &imx219_subdev_ops); // 2
imx219->sd.flags |= V4L2_SUBDEV_FL_HAS_DEVNODE |
┆ V4L2_SUBDEV_FL_HAS_EVENTS;
imx219->sd.entity.function = MEDIA_ENT_F_CAM_SENSOR;
imx219->pad.flags = MEDIA_PAD_FL_SOURCE;
ret = media_entity_pads_init(&imx219->sd.entity, 1, &imx219->pad); // 3
ret = v4l2_async_register_subdev_sensor(&imx219->sd); // 4
...
}
- 初始化sensor结构体,分配内存;
- 初始化一个 v4l2 subdev,并绑定到 I2C client;
- 初始化 media entity 的 pad 信息,让media controller知道当前sensor有一个输出pad,可以连接到后级模块;
- 异步注册,把当前sensor subdev注册到v4l2框架;
sensor device tree
S100默认加载imx219设备树,设备树组织格式如下面所示,如果接入其他的mipi sensor,需要以dts overlay的方式覆盖掉imx219的dts。
&i2c1 {
status = "okay";
imx219@10 {
status = "okay";
compatible = "sony,imx219";
...
reg = <0x10>; // sensor i2c地址
...
port {
cam_to_mipi_csi0: endpoint { // MIPI 相关属性
remote-endpoint = <&rdk_s100_mipi_csi0_from_cam>; // 对接到mipi RX0
clock-lanes = <0>;
data-lanes = <1 2>;
link-frequencies =
/bits/ 64 <456000000>;
virtual-channel = <0>;
};
};
};
};
&mipi_host0 {
ports {
port@0 {
rdk_s100_mipi_csi0_from_sensor0: endpoint {
remote-endpoint = <&sensor0_to_mipi_csi0>;
clock-lanes = <0>;
data-lanes = <1 2>; // mipi data lane 为 2lane
lane-rate = <1728>; // mipi 速率
vc_id = <0>; // sensor 输出的 virtual channel
emb-en = <1>; // sensor 输出是否包含 embedded data
};
};
};
};
V4L2 GMSL SerDes接口调用说明
S100 Camsys支持接入美信加串器的sensor,camera子板默认搭载美信解串器MAX96712。GMSL sensor同样作为一个v4l2 subdev接入v4l2框架,这里加串器及解串器驱动为gmsl sensor驱动提供操作函数集,不实现为v4l2 subdev。

serdes 相关的一些数据结构及回调函数定义在 kernel/include/media/i2c/serdes_core.h,需要包含该头文件,#include <media/i2c/serdes_core.h> 本小结以0820C GMSL sensor为例,介绍camsys gmsl sensor开发。 ####sensor结构体新增成员
struct ar0820 {
...
struct serdes_device *ser_dev;
struct serdes_device *dser_dev;
struct serdes_ctx g_ctx;
..
};
sensor驱动需要包含ser_dev与dser_dev两个结构体,用来操作加串和解串; 需要包含serdes contex g_ctx成员��,用来保存serdes相关属性,其中主要使用的结构体成员说明如下:
struct serdes_ctx {
u32 serdes_csi_link; // 在 sensor 驱动中保存解串器的port 值
u32 ser_reg; //加串器i2c地址映射目标值
u32 sdev_reg; // sensor 实际i2c地址
u32 sdev_def; // sensor i2c地址映射目标值
struct device *sen_dev;
u32 lane_num; // 在 sensor 驱动中保存 sensor与加串器连接的mipi data lane数
u32 data_type; // 在 sensor 驱动中保存 sensor输出的数据类型
u32 dst_vc; // 在 sensor 驱动中保存 sensor输出的virtual channel
};
serdes回调函数
加串器与解串器都提供了下面的回调函数,供sensor driver中调用,调用需要使用SERDES_OP宏
/* 默认返回值大于等于 0 代表操作成功,返回值小于 0 则代表操作失败 */
struct serdes_ops {
/* 加串器和解串器做初始化用,只下一些基础配置 */
int (*init)(struct serdes_device *serdes_dev);
/* 目前是给 d457 -> max9295a 做额外初始化用,将 max929a 4个 pipe 都使能 */
int (*init_ex)(struct serdes_device *serdes_dev);
/* 预留 */
int (*reset)(struct serdes_device *dev);
/* 将解析的 dts 值,通过 serdes_ctx 传递给加串器和解串器 */
int (*set_ctx)(struct serdes_device *serdes_dev,
┆ struct serdes_ctx *ctx);
/* 用于解串器建立 link 使用,默认 setting 是没有使能 link,在该ops 中会使能 link */
int (*setup_link)(struct serdes_device *serdes_dev,
┆ struct device *sen_dev);
/* remote_contrl_get -> map_addr -> remote_contrl_put 配套使用,在 sensor/加串器 地址重映射期间,保证 sensor/加串器 的稳定性 */
int (*remote_contrl_get)(struct serdes_device *serdes_dev,
┆struct device *sen_dev);
int (*remote_contrl_put)(struct serdes_device *serdes_dev);
/* 加串器调用,重新映射加串器和sensor 的i2c 地址 */
int (*map_addr)(struct serdes_device *serdes_dev);
/* 加串器拉高某个 mfp */
int (*enable_mfp)(struct serdes_device *serdes_dev, uint8_t gpio_index);
/* 加串器拉低某个 mfp */
int (*clear_mfp)(struct serdes_device *serdes_dev, uint8_t gpio_index);
/* 解串器打开 mipi tx,开始出流,加串器默认是打开的,所以无需主动调用 */
int (*set_stream)(struct serdes_device *serdes_dev,
struct device *sen_dev, int enable);
/* 解串器和加串器配置 gmsl video pipe 属性,属性由 dts 解析得到,默认配置加串器/解串器 pipe-z */
int (*set_pipe)(struct serdes_device *serdes_dev,
struct device *sen_dev);
/* 针对复杂场景,解串器和加串器配置 gmsl video pipe 数据,可根据每个 pipe 灵活配置 */
int (*set_pipe_ex)(struct serdes_device *serdes_dev, struct device *sen_dev,
uint8_t pipe, uint8_t vc_id, uint8_t data_type);
/* 通过 virtual channel 值,查看解串器是否还有空余的 pipe,返回空余的 pipe id(0-3),
d457 sensor 在出流前使用,与 release_pipe_id 配套使用 */
int (*get_pipe_id)(struct serdes_device *serdes_dev,
uint8_t vc_id);
/* 使用完解串器 video pipe,释放对应的 video pipe*/
int (*release_pipe_id)(struct serdes_device *serdes_dev,
uint8_t pipe_id);
};
- 在sensor probe中需要调用一些serdes的ops来做一些软件初始化,解析 dts 值,并通过 set_ctx 分别传递给加串器和解串器驱动。
ret = SERDES_OP(priv->ser_dev, set_ctx, priv->ser_dev, &priv->g_ctx);
ret = SERDES_OP(priv->dser_dev, set_ctx, priv->dser_dev, &priv->g_ctx);
分别调用加串器和解串器的set_ctx函数与加解串器建立软件上的链接关系;
ret = SERDES_OP(priv->dser_dev, init, priv->dser_dev);
ret = SERDES_OP(priv->dser_dev, setup_link, priv->dser_dev, sen_dev);
ret = SERDES_OP(priv->dser_dev, remote_contrl_get, priv->dser_dev,
ret = SERDES_OP(priv->ser_dev, map_addr, priv->ser_dev);
ret = SERDES_OP(priv->dser_dev, remote_contrl_put, priv->dser_dev);
ret = SERDES_OP(priv->ser_dev, init, priv->ser_dev);
ret = SERDES_OP(priv->ser_dev, set_pipe, priv->ser_dev, sen_dev);
ret = SERDES_OP(priv->dser_dev, set_pipe, priv->dser_dev, sen_dev);
ret = SERDES_OP(priv->ser_dev, clear_mfp, priv->ser_dev,
priv->mfp_reset);
ret = SERDES_OP(priv->ser_dev, enable_mfp, priv->ser_dev,
priv->mfp_reset);
调用ops做一些加解串器link、addr、pipe、mfp等初始化; 2. 在s_stream中配置解串器开流,加串器mfp使能等:
SERDES_OP(priv->ser_dev, enable_mfp, priv->ser_dev,priv->mfp_trigger);
SERDES_OP(priv->dser_dev, set_stream, priv->dser_dev, sen_dev, 1);
sensor device tree
S100 v4l2 gmsl sensor默认加载0820c的dts,gmsl sensor设备树组织格式如下面所示:
ar0820@11 {
compatible="d-robotics,ar0820";
reg = <0x11>; // map后的地址
addr = <0x10>; // sensor i2c实际地址
......
mfp-reset = <0>; // reset连接到加串器的mfp
mfp-trigger = <7>;// trigger pin链接到加串器的mfp
d-robotics,serdes-ser-device = <&ser_a>; // 链接至linkA上的加串
d-robotics,serdes-dser-device = <&dser>; // 接入deserial
status = "okay";
port {
cam_0_to_mipi_csi4: endpoint { // 接入mipi rx4
remote-endpoint = <&mipi_csi4_from_cam_0>;
virtual-channel = <0>;
};
};
};
Sensor dtbo 文件编写配置说明
S100 uboot 支持 DTB Overlay 功能,可以在不修改当前启动使用的dts文件的情况下,通过编写配置对应的dtbo文件。对当前启动使用的dtb文件进行增/改(不支持删减)的功能
sensor dtbo 文件生成
- 编写dtso文件
#include <dt-bindings/gpio/gpio.h>
/dts-v1/;
/plugin/;
/ {
fragment@1 {
target-path = "/soc/i2c@39450000/";
__overlay__ {
status = "okay";
d457@11 {
compatible="intel,d4xx";
reg = <0x11>;
def-addr = <0x10>;
width = <640>;
height = <480>;
cam-type = "Depth";
data_type = <0x2e>;
lane_num = <2>;
vc_id = <0>;
d-robotics,serdes-ser-device = <&ser_a>;
d-robotics,serdes-dser-device = <&dser>;
status = "okay";
port {
sensor_0_to_mipi_csi4: endpoint {
remote-endpoint = <&mipi_csi4_from_sensor_0>;
virtual-channel = <0>;
};
};
};
};
};
};
- 在板端编译生成dtbo
- 安装dtc 工具
sudo apt install device-tree-compiler -y
- 预处理dtso 文件
#当编写的dtso中include 头文件 或者 有定义时,才需要用以下命令预处理dtso文件
#获取dts 头文件路径
HEADER_DIR=$(find /usr/src -maxdepth 1 -type d -name "linux-headers-*" | sort -Vr | head -n 1)
DTS_HEAD_PATH="$HEADER_DIR/include"
#将编写的dtso文件预处理生成dtbi文件
cpp -nostdinc -I "$DTS_HEAD_PATH" sample.dtso > sample.dtbi
- 编译生成dtbo 文件 如果有dtbi文件,则通过dtbi文件生成最终的dtbo文件
dtc -q -@ -I dts -O dtb -o sample.dtbo sample.dtbi
如果没有dtbi文件,则通过编写的dtso文件生成最终的dtbo文件
dtc -q -@ -I dts -O dtb -o sample.dtbo sample.dtso
sensor dtbo 开机自动生效配置
-
将编译生成的dtbo 文件放置到 /boot/overlays 目录下 若板端没有/boot/overlays目录,用户可自行添加/boot/overlays 目录, 或者通过安装hobot-camera.deb 来获取/boot/overlays 目录 和 d457 sensor dtbo 文件

-
修改config.txt 文件,配置要添加的dtbo文件 若该位置没有config.txt文件, 用户可自行添加config.txt 文件
 按照下面的方法,修改config.txt
dtbo_file_path=/overlays/v0p5_d457_2v_depth_color.dtbo
按照下面的方法,修改config.txt
dtbo_file_path=/overlays/v0p5_d457_2v_depth_color.dtbo -
重启板子,使能配置的dtbo文件。在debug 版本的uboot log中,可以检查加载dtbo 的情况

Sensor gain LUT表编写说明
RAW格式的sensor,对接到S100 ISP图像系统,除了编写sensor v4l2 驱动,另外需要制作一个so,存放sensor增益lut转换表,包括again lut、dgain lut等。人眼对亮度的感知更接近对数尺度而非线性尺度,dB单位更符合这种感知,S100 ISP这里sensor增益lut表存放的gain数组,需要存放db单位连续的sensor gain 寄存器配置值,供ISP调节sensor增益时找到对应的sensor寄存器值,下发到sensor。下面以imx219为例,介绍v4l2 sensor lut so如何制作。
imx219 sensor gain lut表制作目录在sdk中位于hobot-camera/v4l2/v4l2_helper/imx219_v4l2;
- 添加<sensor_name>_camera_helper.c文件、Makefile及版本文件version.mk
imx219_v4l2
├── imx219_camera_helper.c
├── Makefile
└── version.mk
- 在xxx_helper.c文件中,制作again lut表及dgain lut表,lut表为一个uint32类型的数组,最多256个成员,每个成员为gain寄存器的配置值,相邻成员对应的db要连续,以imx219为例:
static uint32_t imx219_again_lut[] = {
0x00, // 0db
0x05, // 约0.2db
0x0B, // 约0.4db
0x0F, // 约0.6db
0x15, // 约0.8db
......
0xE7, // 约20.4db
0xE8, // 约20.6db
0xffff, // end flag
};
static uint32_t imx219_dgain_lut[] = {
0x0100, // 0db
0x0106, // 约0.2db
0x010c, // 约0.4db
0x0112, // 约0.6db
......
0x0f53, // 约23.6db
0x0fa9, // 约23.8db
0x0fd9, // 约24.0db
0xffff, // end flag
};
lut表最后一个成员固定为0xffff。
- 编写again index to reg、dgain index to reg callback函数,及获取callback的接口,复用219的即可:
typedef uint32_t (*AGainIndexToReg_t)(uint8_t); // 传入uint8 index,获得uint32 sensor寄存器配置值
typedef uint32_t (*DGainIndexToReg_t)(uint8_t); // 同上
typedef struct {
AGainIndexToReg_t again_index_to_reg_callback;
DGainIndexToReg_t dgain_index_to_reg_callback;
} Callbacks; // callback结构体,不需要更改
uint32_t again_index_to_reg_function(uint8_t isp_index)
{
if (isp_index >= sizeof(imx219_again_lut)/sizeof(uint32_t))
isp_index = sizeof(imx219_again_lut)/sizeof(uint32_t) - 1;
return imx219_again_lut[isp_index];
}
uint32_t dgain_index_to_reg_function(uint8_t isp_index)
{
if (isp_index >= sizeof(imx219_dgain_lut)/sizeof(uint32_t))
isp_index = sizeof(imx219_dgain_lut)/sizeof(uint32_t) - 1;
return imx219_dgain_lut[isp_index];
}
Callbacks cb = {again_index_to_reg_function,
dgain_index_to_reg_function,};
//get_index_to_reg_callbacks
Callbacks* get_index_to_reg_callbacks() {
return &cb;
}
生成的so命名为lib<sensor_name>_v4l2.so,运行时会自动匹配并dlopen该so,调用符号最终获取到lut表。
曝光同步sensor驱动说明
S100 camsys serdes提供了trigger相关接口,sensor驱动中可以调用来配置lpwm硬件、使能lpwm。 硬件同步曝光目前仅支持gmsl sensor,sensor dts中需要配置正确的trigger mfp管脚。
SERDES_OP(priv->dser_dev, trigger_cfg, priv->dser_dev, sen_dev, period, duty);
在sensor的初始化配置format格式中调用trigger_cfg,下发lpwm配置 period单位为ns,计算方式为(1000000/fps)*1000 duty单位为ns,没有特殊要求可以配置为10000
SERDES_OP(priv->dser_dev, trigger_enable, priv->dser_dev, sen_dev, enable);
在stream开关流时,调用trigger_enable打开或关闭lpwm输出