4.1.3 静态图片推理
图像分类算法—Mobilenet v1
本示例主要实现以下功能:
- 加载
mobilenet v1图像分类模型 - 读取
zebra_cls.jpg静态图片作为模型的输入 - 解析模型输出,得到图片的分类结果
运行方法
本示例的完整代码和测试数据安装在 /app/pydev_demo/01_basic_sample/ 目录下,调用以下命令运行
cd /app/pydev_demo/01_basic_sample/
sudo python3 ./test_mobilenetv1.py
运行成功后,会输出图像的分类结果,如下所示:
========== Classification result ==========
cls id: 340, Confidence: 0.9915, class_name: zebra
示例代码解析
-
导入算法推理库hobot_dnn、numpy和opencv模块
from hobot_dnn import pyeasy_dnn as dnn
import numpy as np
import cv2 -
模型加载 调用 load 接口加载模型文件,并返回
hobot_dnn.pyeasy_dnn.Model类的list。models = dnn.load('../models/mobilenetv1_224x224_nv12.bin')本示例中
mobilenetv1模型的输入是1x3x224x224数据,格式为NCHW。输出是1000个list数据,表示1000个类别的置信度。示例中定义了print_properties函数用来输出模型的输入、输出参数:# print properties of input tensor
print_properties(models[0].inputs[0].properties)
# print properties of output tensor
print_properties(models[0].outputs[0].properties) -
数据前处理
示例打开含有斑马的图像文件
zebra_cls.jpg,并把图片缩放到符合模型输入的尺寸(244 x 224):# open image
img_file = cv2.imread('./zebra_cls.jpg')
# get the input tensor size
h, w = models[0].inputs[0].properties.shape[2], models[0].inputs[0].properties.shape[3]
print("input tensor size: %d x %d" % (h, w))
des_dim = (w, h)
# resize image to inpust size
resized_data = cv2.resize(img_file, des_dim, interpolation=cv2.INTER_AREA)
然后通过
bgr2nv12_opencv函数把bgr格式的图像转换成符合模型输入的NV12格式:nv12_data = bgr2nv12_opencv(resized_data) -
模型推��理
调用 Model 类的
forward接口进行算法推理,然后得到一个含有1000个值的list,表示1000个类别的预测概率值。outputs = models[0].forward(nv12_data) -
算法后处理
算法模型的输出结果需要通过后处理,得到我们需要的类别、检测框等信息。本示例中模型输出对应1000个类别,需要根据置信度进行过滤,��并得到正确结果。
print(f"cls id: {label}, Confidence: {prob}, class_name: {name}")正确运行的结果为:
========== Classification result ==========
cls id: 340, Confidence: 0.9915, class_name: zebra
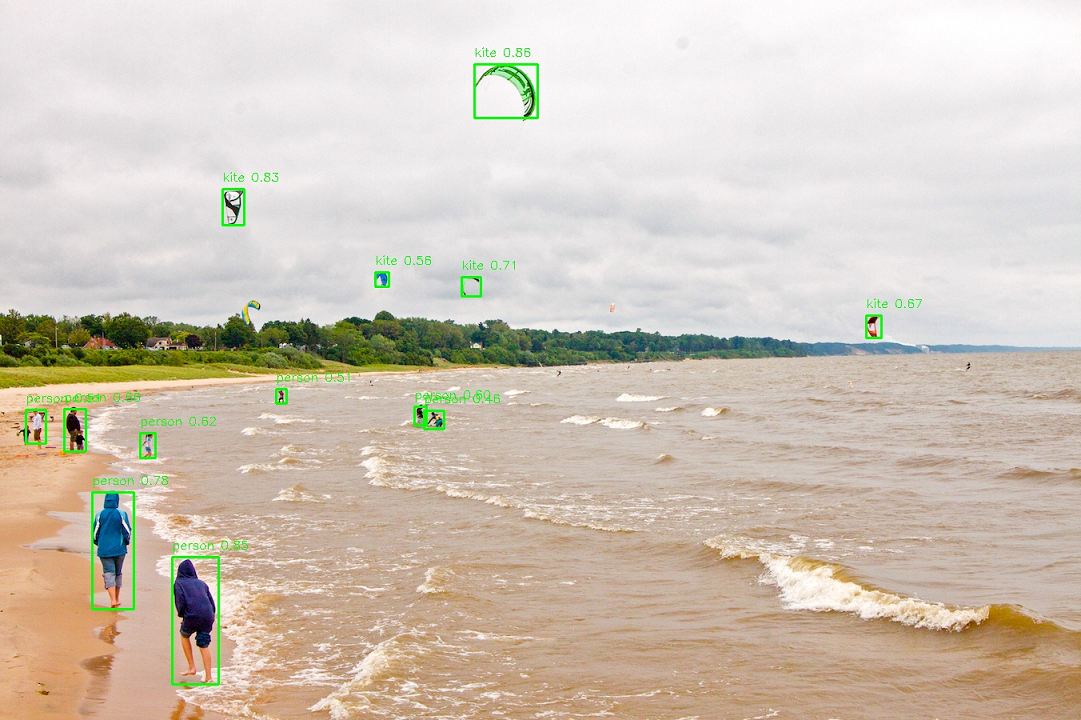
目标检测算法—YOLOv3
本示例主要实现以下功能:
- 加载
yolov3_416x416_nv12目标检测模型 - 读取
kite.jpg静态图片作为模型的输入 - 分析算法结果,渲染检测结果
运行方法
本示例的完整代码和测试数据安装在 /app/pydev_demo/06_yolov3_sample/ 目录下,调用以下命令运行
cd /app/pydev_demo/06_yolov3_sample/
sudo python3 ./test_yolov3.py
运行成功后,会输出目标检测结果,并且输出渲染结果到result.jpg文件中,如下图:

RDK X5 上该sample效果会有�所提升,渲染结果文件名称改为output_image.jpg,效果如下:

目标检测算法—YOLOv5
本示例主要实现以下功能:
- 加载
yolov5s_672x672_nv12目标检测模型 - 读取
kite.jpg静态图片作为模型的输入 - 分析算法结果,渲染检测结果
运行方法
本示例的完整代码和测试数据安装在 /app/pydev_demo/07_yolov5_sample/ 目录下,调用以下命令运行
cd /app/pydev_demo/07_yolov5_sample/
sudo python3 ./test_yolov5.py
运行成功后,会输出目标检测结果,并且输出渲染结果到result.jpg文件中,如下图:

RDK X5 上该sample效果会有所提升,渲染结果文件名称同样改为了output_image.jpg,效果如下:
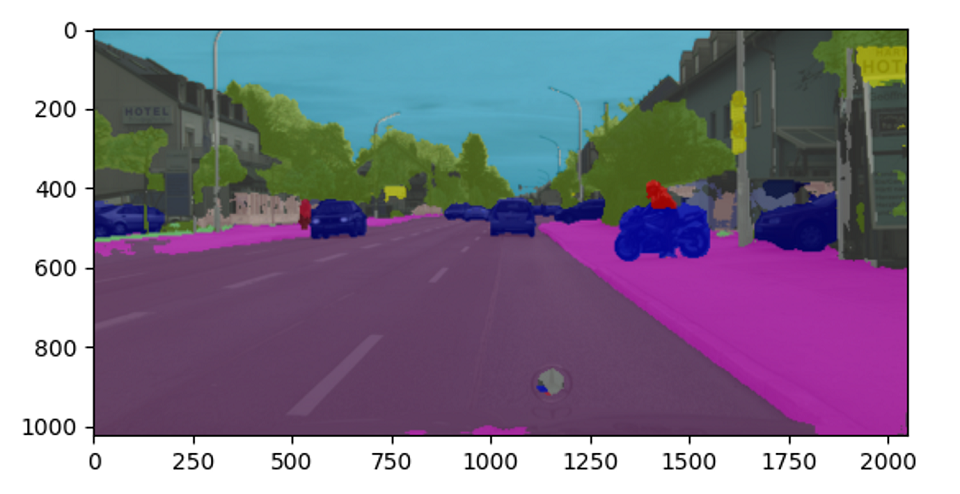
图像分割算法—unet
本示例主要实现以下功能:
- 加载
mobilenet_unet_1024x2048_nv12图像分割模型(cityscapes预训练的分割模型) - 读取
segmentation.png静态图片作为模型的输入 - 分析算法结果,渲染分割结果
运行方法
本示例的完整代码和测试数据安装在 /app/pydev_demo/04_segment_sample/ 目录下,调用以下命令运行
cd /app/pydev_demo/04_segment_sample/
sudo python3 ./test_mobilenet_unet.py
运行成功后,会输出图像的分割结果,并且输出分割效果图到segment_result.png文件中,如下图: