7.2.1 开发环境搭建及编译说明
本章节介绍交叉编译开发环境的要求及搭建,源码下载和系统镜像的编译方法说明。
交叉编译开发环境
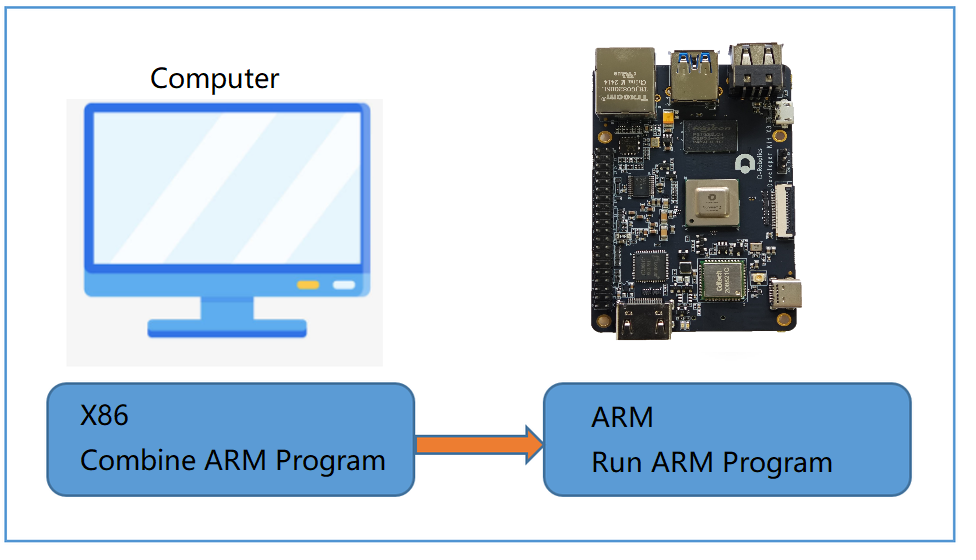
交叉编译是一种在主机上开发和构建软件的方法,构建的软件随后被部署到开发板上运行。
- 主机特点:主机通常具备更高的性能和更大的内存容量,可显著加速代码构建。
- 工具支持:主机可以安装更多的开发工具,从而提升开发效率。
交叉编译环境的搭建是开发过程中必不可少的一步。下图展示了交叉编译环境的整体框架:
RDK OS 开发指南
开发 RDK X3
RDK X3 的相关源码托管在 GitHub 的 rdk-gen 仓库。
- 开发环境搭建:仓库中的 README 提供了详细的开发环境配置指南。
- 系统编译方法:包括搭建开发环境、构建系统镜像、交叉编译工具链配置、软件开发方法以及常见问题的解决方法。
开发 RDK X5
RDK X5 的相关源码托管在 GitHub 的 x5-rdk-gen 仓库。
- 开发环境搭建:仓库中的 README 提供了从环境安装到源码编译的完整说明。
- 系统编译方法:包括搭建开发环境、构建系统镜像、交叉编译工具链配置、软件开发方法以及常见问题的解决方法。
通过以上步骤,您可以完成 RDK OS 系统的开发和编译。详细信息请参考对应的 GitHub 仓库说明文件。