5.4.6 Voice-Controlled Robot Movement
Overview
The voice-controlled robot movement feature uses voice commands to control the robot to move forward, backward, left, and right. It must be used together with the intelligent voice module of the D-Robotics RDK robot operating system. The workflow is shown below:
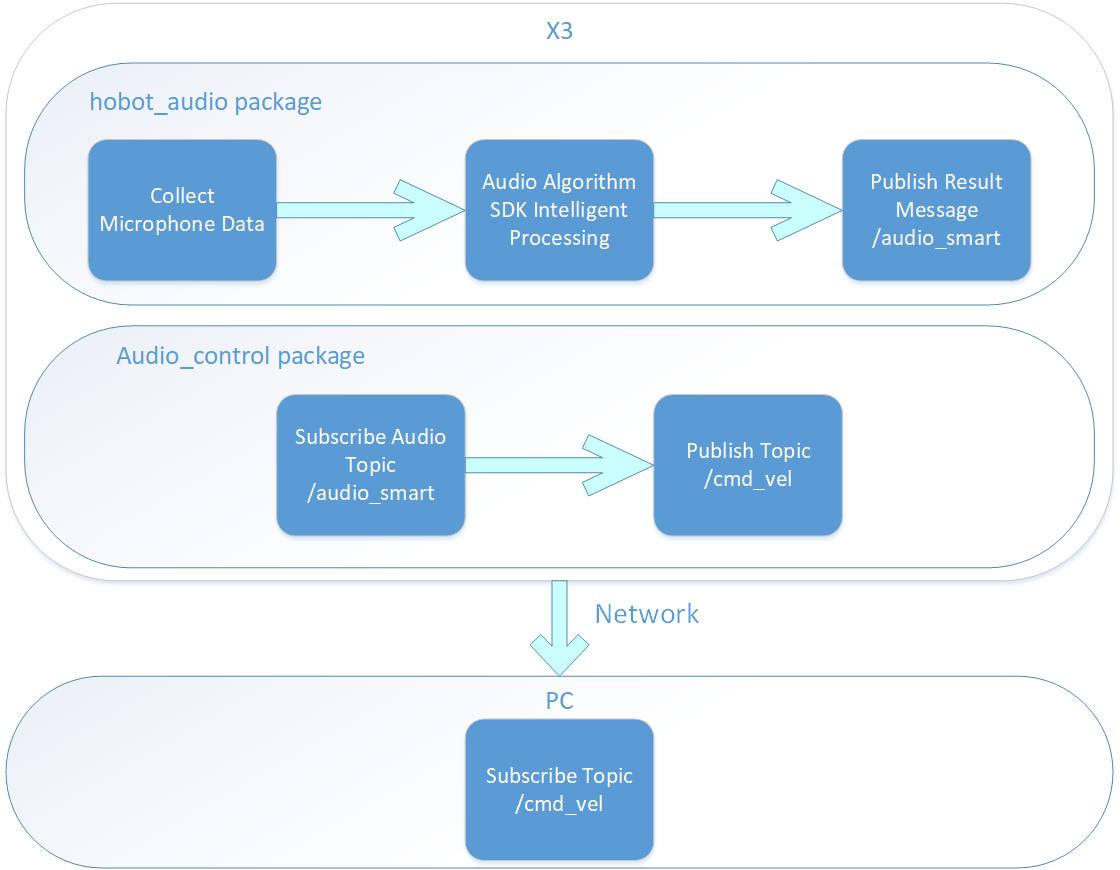
The App uses a virtual robot in the PC-side Gazebo simulation environment as an example. The published control commands can also be used directly to control a physical robot.
Code repository: (https://github.com/D-Robotics/audio_control.git)
Supported Platforms
| Platform | Runtime Environment | Example Functionality |
|---|---|---|
| RDK X3 | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) | Start the intelligent voice module to parse voice information and perform voice control, displaying control results via Gazebo |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | Start the intelligent voice module to parse voice information and perform voice control, displaying control results via Gazebo |
Note: Only RDK X3 is supported. RDK X3 Module is not supported yet.
Preparation
RDK Platform
-
The RDK has been flashed with the Ubuntu image.
-
TogetheROS.Bot has been successfully installed on the RDK.
-
The intelligent voice algorithm package has been successfully installed on the RDK. Installation commands:
- Foxy
- Humble
sudo apt update
sudo apt install tros-hobot-audiosudo apt update
sudo apt install tros-humble-hobot-audio
If the sudo apt update command fails or reports an error, please refer to the FAQ section Q10: How to handle apt update command failure or error? for resolution.
If the sudo apt update command fails or reports an error, please refer to the FAQ section Q10: How to handle apt update command failure or error? for resolution.
-
A compatible audio board has been connected to the RDK (refer to the Intelligent Voice section).
-
A PC on the same network as the RDK (wired or on the same Wi-Fi, with the first three octets of the IP address matching). The PC requires the following environment:
- Foxy
- Humble
- Ubuntu 20.04 and ROS2 Foxy desktop edition
- Gazebo and Turtlebot3 related packages. Installation:
sudo apt-get install ros-foxy-gazebo-*
sudo apt install ros-foxy-turtlebot3
sudo apt install ros-foxy-turtlebot3-simulations
- Ubuntu 22.04 and ROS2 Humble desktop edition
- Gazebo and Turtlebot3 related packages. Installation:
sudo apt-get install ros-humble-gazebo-*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-simulations
Usage
Start the simulation environment on the PC:
- Foxy
- Humble
source /opt/ros/foxy/setup.bash
source /opt/ros/humble/setup.bash
export TURTLEBOT3_MODEL=burger
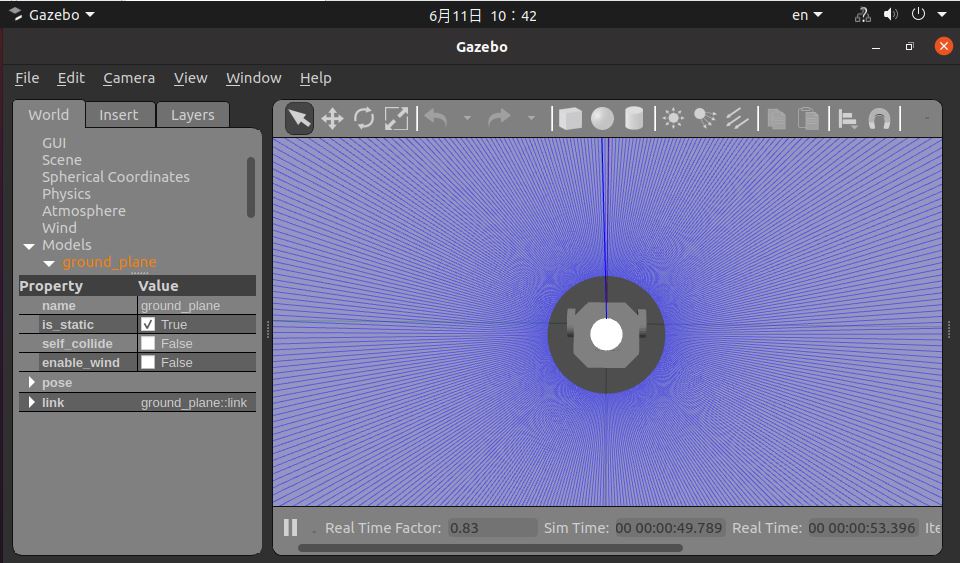
ros2 launch turtlebot3_gazebo empty_world.launch.py
After successful startup, the robot in the simulation environment appears as follows:
Start the program on the RDK platform:
- Copy the audio configuration file
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/${TROS_DISTRO}/lib/hobot_audio/config/ .
-
Confirm the microphone device
The microphone device number is set via the
micphone_namefield in the configuration file config/audio_config.json. The default is "hw:0,0", which represents audio device Card0 Device0. The device number can be checked with the commandls /dev/snd, for example "pcmC0D1c"; the last letter c indicates a capture device, C0 indicates Card0, D1 indicates Device1. Change the parameter to "hw:0,1". -
Start the program
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash# 配置tros.b环境
source /opt/tros/humble/setup.bash#启动launch文件
ros2 launch audio_control audio_control.launch.pyAfter the program starts successfully, use the command words "向前走" (move forward), "向后退" (move backward), "�向左转" (turn left), "向右转" (turn right), and "停止运动" (stop) to control robot movement.
Result Analysis
The RDK terminal outputs the following information:
This is audio control package.
============================================
audio control usage
Wake up device is "D-Robotics 你好".
Audio control commnad word definitions are:
"向前走": move front.
"向后退": move back.
"向右转": rotate robot to right.
"向左转": rotate robot to left.
============================================
The log above shows a segment of output after the audio control package starts. The log shows that the wake word configured for this voice control module is "D-Robotics 你好", and the command words for controlling robot movement are: "向前走", "向后退", "向左转", and "向右转".
Use the ros2 topic list command on the PC terminal to query RDK topic information:
$ ros2 topic list
/audio_smart
/cmd_vel
/audio_smart is the algorithm message published by X3 containing intelligent voice results. /cmd_vel is the motion control command published by the RDK.
Use the ros2 topic echo /cmd_vel command on the PC terminal to view motion control commands published by the RDK:
linear:
x: 0.30000001192092896
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: -0.30000001192092896
z: 0.0
angular:
x: 0.0
y: 0.0
z: -0.5
---
linear:
x: 0.0
y: 0.30000001192092896
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.5
---
In the PC simulation environment, the robot moves according to voice control command words. The simulation result is shown below: