icm42688
产品简介
ICM42688 为 6 轴 IMU(三轴陀螺仪 + 三轴加速度计),可通过 I2C 接入 RDK 开发板。驱动注册为独立的陀螺仪与加速度计 IIO 设备,便于分别读取角速度与线加速度原始值。
适用平台
本文档针对 RDK X5 / RDK X5 Module,系统镜像建议 3.4.1 及以上。
安装方法
硬件连接
这里以 RDK 双目摄像头连接举例(不是说一定要用双目摄像头,只是使用模组上��的传感器)

- 将 ICM42688 模组按说明书接入 RDK X5 的 mipi 排插。
- 确认模组供电与 I2C 地址无冲突。
软件配置
在全屏终端中运行 sudo srpi-config:
- 进入
3 Interface Options→I6 IMU

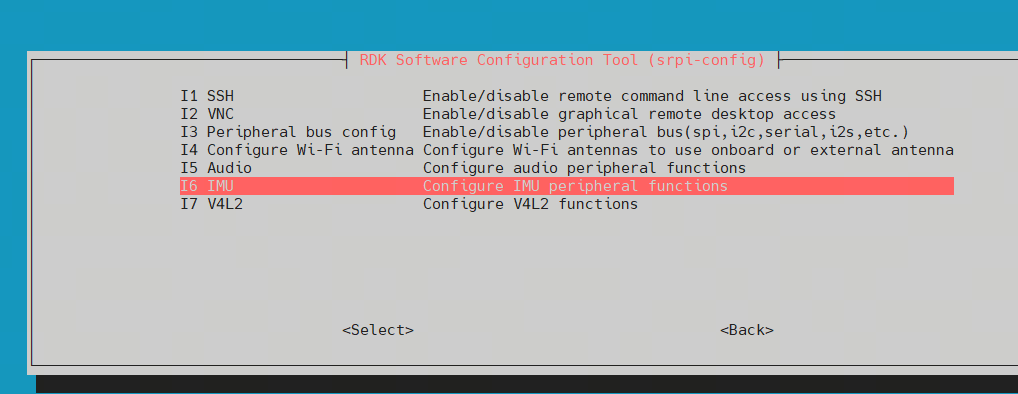
- 选择 ICM42688 相关选项(以菜单显示为准)

- 选择
Finish,确认后重启


卸载方法
- 进入
srpi-config→3 Interface Options→I6 IMU - 选择
UNSET - 断电后取下模组
运行
1. 检查 IIO 设备
ls /sys/bus/iio/devices/
2. 读取传感器数据
以下示例中 iio:device1、iio:device2 序号以实际注册结果为准,请先通过 name 节点确认:
cat /sys/bus/iio/devices/iio:device1/name
cat /sys/bus/iio/devices/iio:device2/name
预期示例输出:
root@ubuntu:~# cat /sys/bus/iio/devices/iio:device1/name
icm42688-gyro
root@ubuntu:~# cat /sys/bus/iio/devices/iio:device2/name
icm42688-accel

读取原始数据:
cat /sys/bus/iio/devices/iio:device2/in_accel_x_raw
cat /sys/bus/iio/devices/iio:device1/in_anglvel_x_raw


能正确读出 name 与各轴 *_raw 数值,即表示 ICM42688 工作正常。
常见问题排查
- device 序号与示例不同:以
ls /sys/bus/iio/devices/与cat .../name结果为准,将命令中的device1/device2替换为实际节点。 - 读取为空或报错:确认
srpi-config已启用 ICM42688 并已重启;检查 I2C 接线与地址。
如需双目 IMU 相机等融合应用,请参阅 双目 IMU 相机。