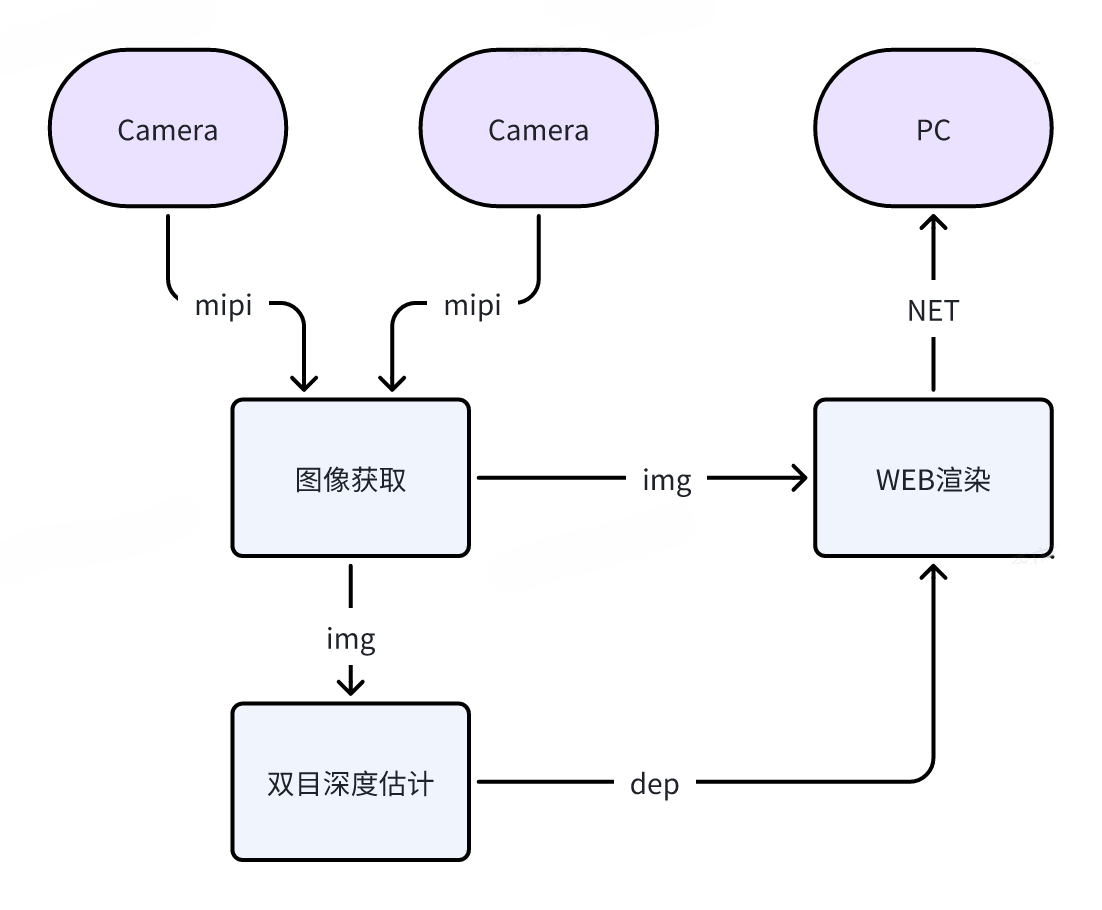
5. 算法开发双目深度估计双目深度估计 地瓜双目深度估计算法输入为双目图像数据,输出为左视图对应的视差图和深度图。算法借鉴 IGEV 网络,采用了 GRU 架构,具有较好的数据泛化性和较高的推理效率。 详细信息可参考:双目深度算法 代码仓库地址:https://github.com/D-Robotics/hobot_stereonet 功能结构图: