3.3 快速开始
SDK 获取
RDK IMU Module SDK 是 D-Robotics 为 RDK IMU 模组开发的软件开发工具,包括 C 语言、Python 和 ROS2 部分。无需系统驱动,支持硬件时间戳,构建简单,开发者可以使用本 SDK 选择自己喜欢的开发方式,快速体验 RDK IMU 模组功能,并基于 SDK 进行二次开发,快速构建自己的机器人应用开发项目。
代码仓库:rdk-imu-module-sdk
在开发板中克隆代码仓库主分支:
git clone https://github.com/D-Robotics/rdk-imu-module-sdk.git
SDK 仓库结构说明如下:
rdk-imu-module-sdk/
├── core/ # C 封装与示例
├── python/ # Python 封装与示例
├── ros2/ # ROS2 封装与示例
├── Makefile # 构建 Makefile
├── doc/
├── README_cn.md
├── README.md
├── LICENSE
└── version/ # 版本信息
安装环境依赖(RDK 系统自带):
sudo apt update
sudo apt install build-essential cmake libgpiod-dev python3-pip
pip install setuptools wheel
运行 C 示例
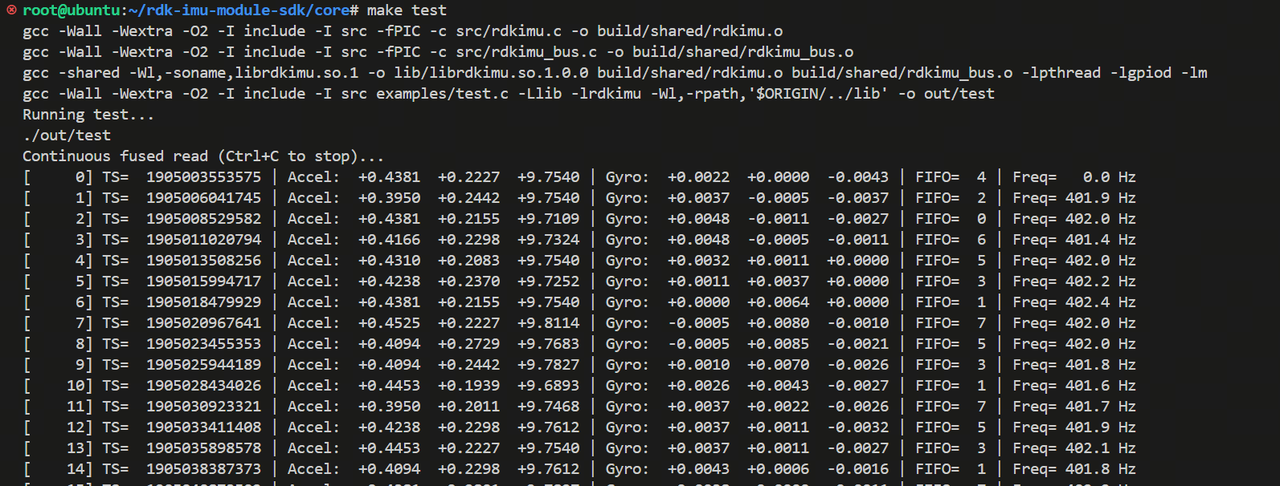
进入 core 目录中构建项目:
cd core
make
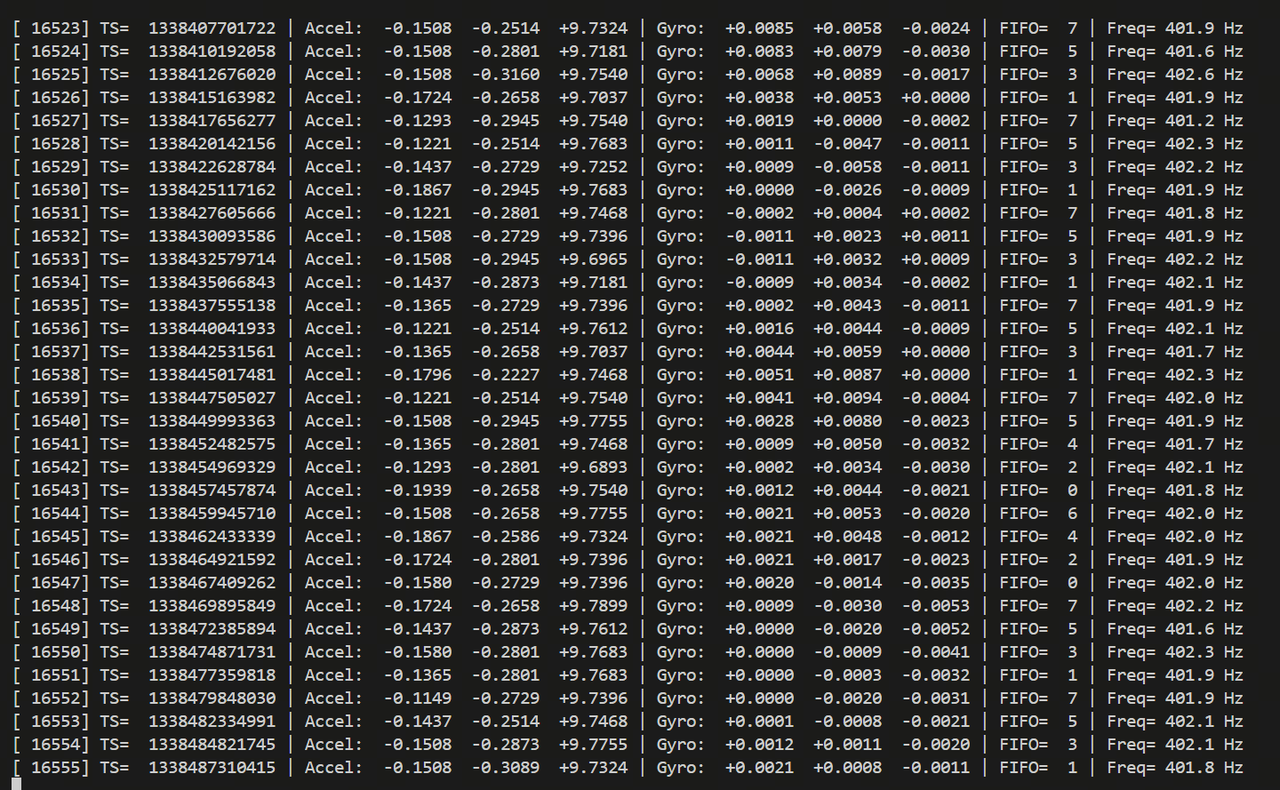
构建完成后,生成了 out/test 执行文件,该文件会自动检测接入的 IMU 的接口类型(I2C/SPI)和设备地址,以 400Hz 的频率输出 IMU 数据。
使用 sudo ./out/test 可以看到以下输出(如果是 SPI 接口,初始化会比较慢,只要终端没报错一直等待即可),Ctrl+C 可退出。
此外,也可以使用 make test 快速构建并运行示例。
还可以通过 make install 将 SDK 头文件和库文件安装到系统路径中,或使用 make uninstall 卸载。
运行 Python 示例
保证 core 目录已被构建过且未被清理,然后进入 python 目录中构建项目:
cd python
make
构建完成后,dist 目录下会生成 .whl 包,将其安装到系统中:
pip install dist/rdkimu-*.whl
或者使用 make install 命令自动构建并安装(卸载同样用 make uninstall)。
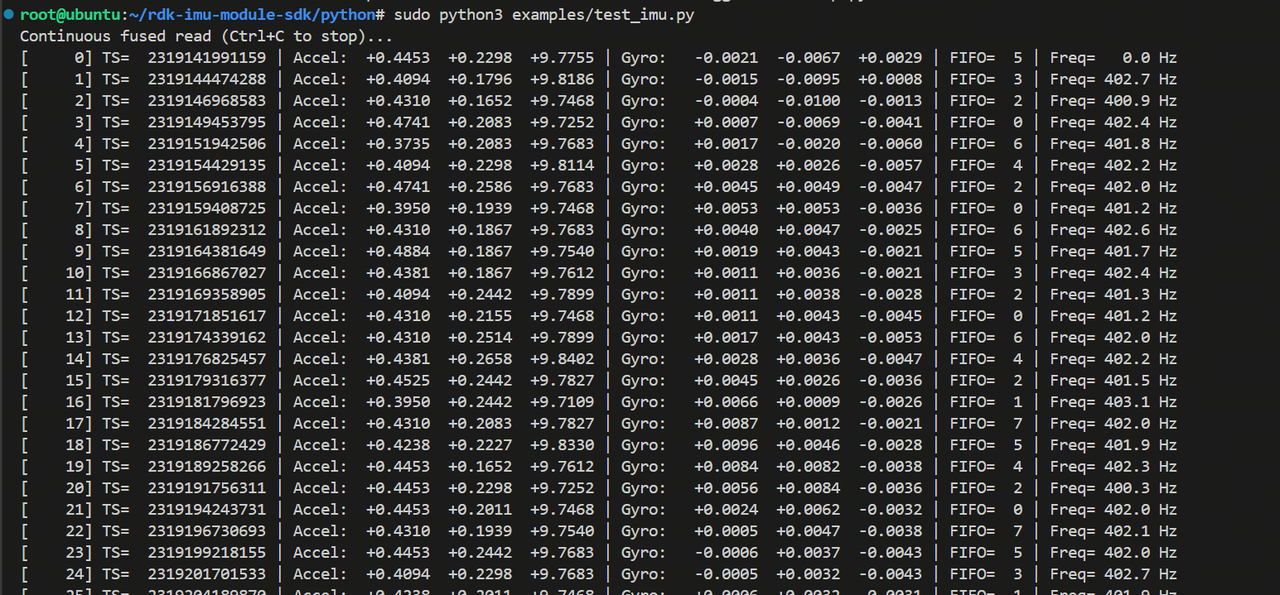
安装完成后,输入 sudo python3 examples/test_imu.py 运行 Python 示例,行为与 C 示例同理,Ctrl+C 可退出。
运行 ROS2 示例
保证 core 目录已被构建过且未被清理,激活 ROS2 环境,然后进入 ros2 目录中构建项目:
source /opt/tros/*/setup.bash # 这里以 tros 为例,ros2 的其他版本就激活对应环境即可
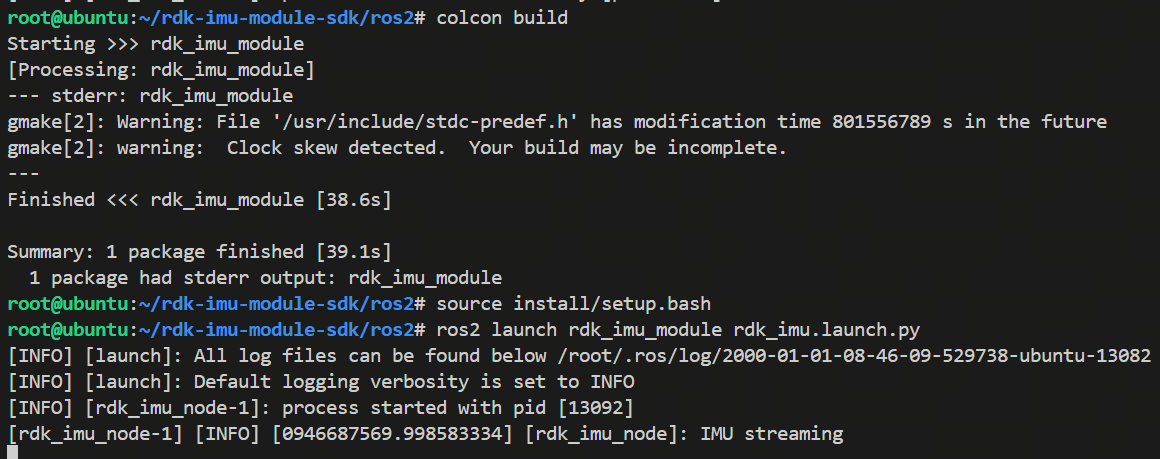
colcon build
构建完成后,安装功能包,然后用 launch 方式启动节点:
source install/setup.bash
ros2 launch rdk_imu_module rdk_imu.launch.py
输出如下,表示 IMU 节点已启动,默认 IMU 话题名称为 /rdkimu/data。
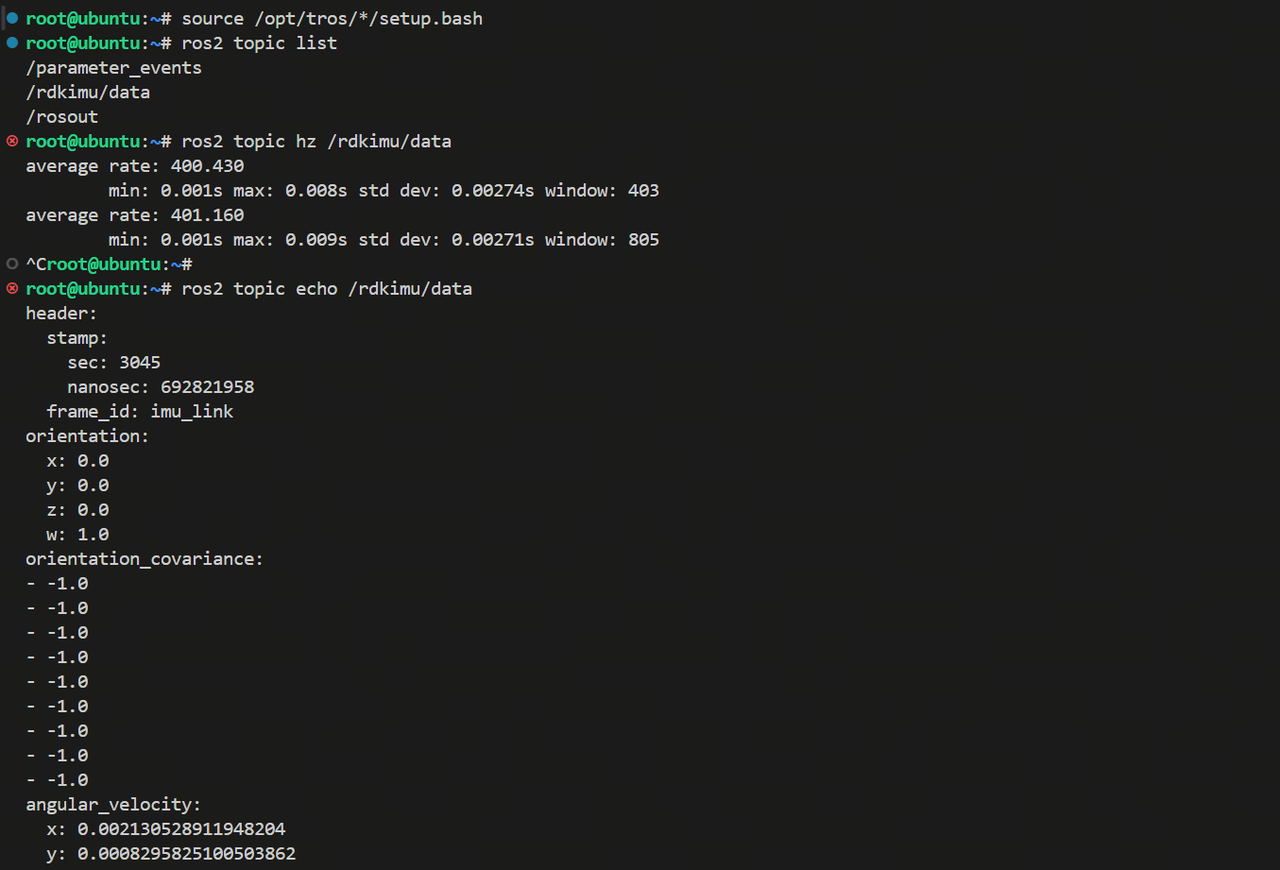
另起一个终端,激活环境,可以使用 ros2 topic 命令查看 IMU 数据。
下一步指引
至此,通过 SDK 源码包,RDK IMU 模组已经被点亮。