Quick Start
The GS130WI camera is currently supported on the TogetheROS.Bot (TROS) platform.
Software Installation and Upgrade
Prerequisites
- RDK development board with the latest RDK OS installed.
- RDK development board with internet access.
- Remote SSH access to the RDK development board.
Upgrade to the Latest TROS
Upgrade the tros.b deb package.
sudo apt update
sudo apt upgrade
Check the current tros.b version:
root@ubuntu:~# apt show tros-humble
Package: tros-humble
Version: 2.2.0-jammy.20240410.221258
Priority: optional
Section: misc
Maintainer: zhuo <zhuo.wang@d-robotics.cc>
Installed-Size: 44.0 kB
Depends: hobot-models-basic, tros-humble-ai-msgs, tros-humble-audio-control, tros-humble-audio-msg, tros-humble- audio-tracking, tros-humble-base, tros-humble-body-tracking, tros-humble-dnn-benchmark-example, tros-humble-dnn- node, tros-humble-dnn-node-example, tros-humble-dnn-node-sample, tros-humble-elevation-net, tros-humble-gesture- control, tros-humble-hand-gesture-detection, tros-humble-hand-lmk-detection, tros-humble-hbm-img-msgs, tros-humb le-hobot-audio, tros-humble-hobot-chatbot, tros-humble-hobot-codec, tros-humble-hobot-cv, tros-humble-hobot-fall down-detection, tros-humble-hobot-hdmi, tros-humble-hobot-image-publisher, tros-humble-hobot-llm, tros-humble-ho bot-mot, tros-humble-hobot-shm, tros-humble-hobot-tts, tros-humble-hobot-usb-cam, tros-humble-hobot-vio, tros-hu mble-hobot-visualization, tros-humble-img-msgs, tros-humble-imu-sensor, tros-humble-line-follower-model, tros-hu mble-line-follower-perception, tros-humble-mipi-cam, tros-humble-mono2d-body-detection, tros-humble-mono2d-trash -detection, tros-humble-mono3d-indoor-detection, tros-humble-parking-perception, tros-humble-parking-search, tro s-humble-rgbd-sensor, tros-humble-websocket, tros-humble-ros-workspace
Download-Size: 5,546 B
APT-Manual-Installed: yes
APT-Sources: http://archive.d-robotics.cc/ubuntu-rdk jammy/main arm64 Packages
Description: TogetheROS Bot
Run Dual MIPI Image Capture
Feature Overview
To enable stereo environmental perception, robot products often use stereo cameras, ToF sensors, and similar devices. To reduce sensor adaptation and usage costs, TogetheROS.Bot wraps multiple commonly used sensors into the hobot_sensor module and publishes standard ROS image messages. When configured sensor parameters do not match the connected camera, the program automatically adapts to the correct sensor type.
| Type | Model | Specification | Supported Platforms |
|---|---|---|---|
| Camera | SC230ai | 2 MP | RDK X5, RDK X5 Module, RDK S100, RDK S100P |
| Camera | SC132gs | 2 MP | RDK X5, RDK X5 Module, RDK S100, RDK S100P |
Code repository: hobot_mipi_cam
Usage
1. Start the hobot_sensor node with the following commands
# Configure tros.b environment
source /opt/tros/humble/setup.bash
# Launch
ros2 launch mipi_cam mipi_cam_dual_channel.launch.py mipi_image_width:=1088 mipi_image_height:=1280
2. If the program outputs the following information, the node has started successfully
[INFO] [launch]: All log files can be found below /root/.ros/log/2024-09-18-19-15-26-160110-ubuntu-3931
[INFO] [launch]: Default logging verbosity is set to INFO
config_file_path is /opt/tros/humble/lib/mipi_cam/config/
Hobot shm pkg enables zero-copy with fastrtps profiles file: /opt/tros/humble/lib/hobot_shm/config/shm_fastdds.xml
Hobot shm pkg sets RMW_FASTRTPS_USE_QOS_FROM_XML: 1
env of RMW_FASTRTPS_USE_QOS_FROM_XML is 1 , ignore env setting
[INFO] [mipi_cam-1]: process started with pid [3932]
[mipi_cam-1] [WARN] [1726658126.449994704] [mipi_node]: frame_ts_type value: sensor
[mipi_cam-1] [ERROR] [1726658126.455022356] [mipi_factory]: This is't support device type(), start defaule capture.
[mipi_cam-1]
[mipi_cam-1] [WARN] [1726658126.456074125] [mipi_cam]: this board support mipi:
[mipi_cam-1] [WARN] [1726658126.456274529] [mipi_cam]: host 0
[mipi_cam-1] [WARN] [1726658126.456333567] [mipi_cam]: host 2
[mipi_cam-1] [WARN] [1726658128.722451045] [mipi_cam]: [init]->cap default init success.
[mipi_cam-1]
...
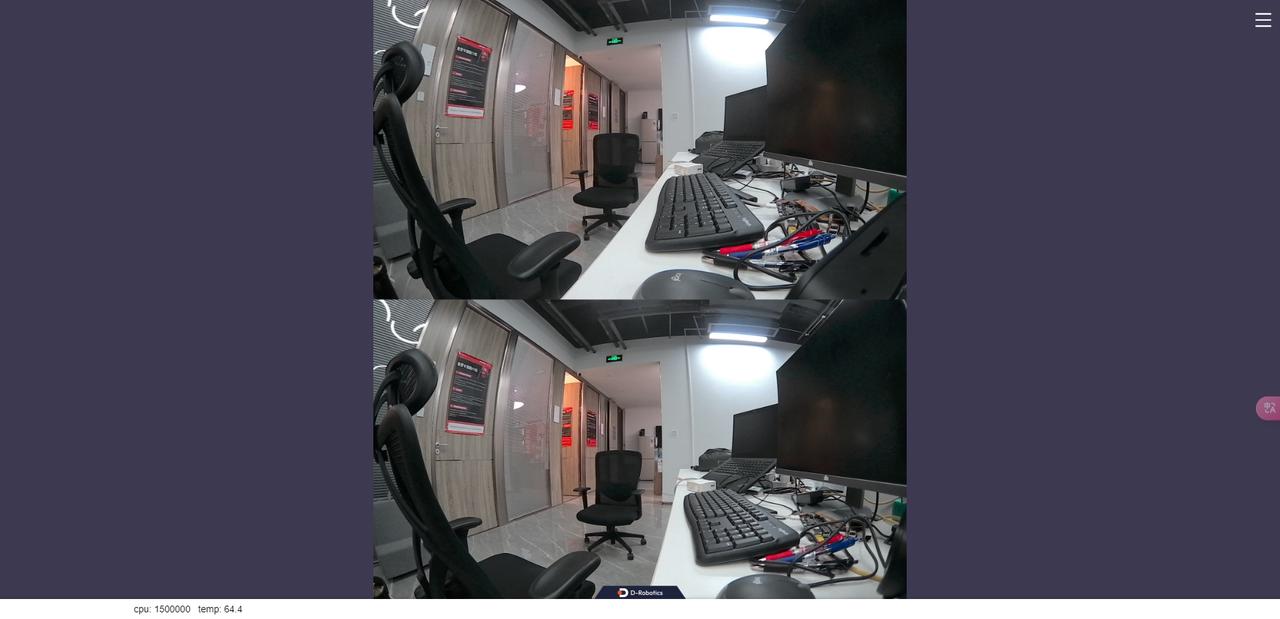
3. View stereo camera images in the web browser
Because raw data is published, a node to encode JPEG images and a node to publish via webservice are required. Start them with:
# Configure tros.b environment
source /opt/tros/humble/setup.bash
# Launch
ros2 launch mipi_cam mipi_cam_dual_channel_websocket.launch.py
4. On a PC, open a browser (Chrome/Firefox/Edge) and enter http://IP:8000 (IP is the RDK IP address). Click the Web display button in the upper-left corner to view the live stereo output.