4.2.4 Model Inference API
hbDNNInfer()
【Function Prototype】
int32_t hbDNNInfer(hbDNNTaskHandle_t *taskHandle, hbDNNTensor **output, const hbDNNTensor *input, hbDNNHandle_t dnnHandle, hbDNNInferCtrlParam *inferCtrlParam)
【Description】
Execute an inference task based on the input parameters. The caller can use the returned taskHandle across functions and threads.
【Parameters】
- [out]
taskHandlePointer to the task handle. - [in/out]
outputOutput of the inference task. - [in]
inputInput of the inference task. - [in]
dnnHandlePointer to the DNN handle. - [in]
inferCtrlParamParameters to control the inference task.
【Return Type】
- Returns
0if the API is executed successfully, otherwise it fails.
When using this interface to submit a task, the taskHandle should be set to nullptr in advance, unless it is to append a task to the specified taskHandle (i.e., using the inferCtrlParam::more function).
Up to 32 model tasks are supported at the same time.
For batch models, it is allowed to set the memory address of input tensors separately. For example, if the input validShape/alignedShape of the model is [4, 3, 224, 224], you can allocate four hbDNNTensors, and set the validShape/alignedShape of each hbDNNTensor as [1, 3, 224, 224] to store the data of each batch. When the model has multiple inputs, the order of input should be input0[batch0], input0[batch1], ..., inputn[batch0], inputn[batch1], ....
hbDNNRoiInfer()
【Function Prototype】
int32_t hbDNNRoiInfer(hbDNNTaskHandle_t *taskHandle, hbDNNTensor **output, const hbDNNTensor *input, hbDNNRoi *rois, int32_t roiCount, hbDNNHandle_t dnnHandle, hbDNNInferCtrlParam *inferCtrlParam)
【Description】
Execute an ROI inference task based on the input parameters. The caller can use the returned taskHandle across functions and threads.
[Parameters]
- [out]
taskHandlePointer to the task handle. - [in/out]
outputOutput of the inference task. - [in]
inputInput of the inference task. - [in]
roisRoi box information. - [in]
roiCountNumber of roi boxes. - [in]
dnnHandlePointer to the dnn handle. - [in]
inferCtrlParamParameters to control the inference task.
[Return Type]
- Returns
0if the API is executed successfully, otherwise it fails.
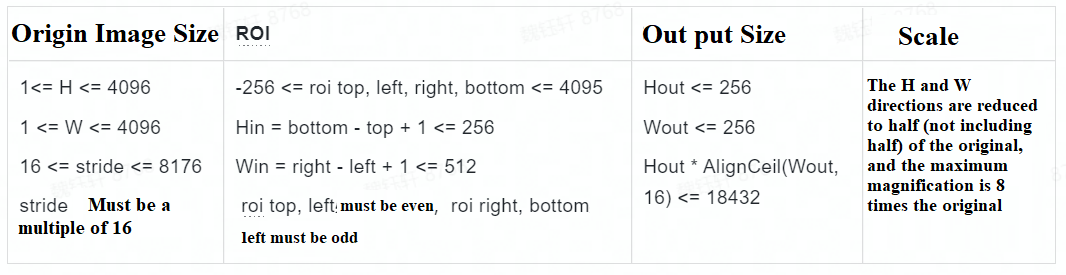
If using RDK X3, follow these rules:
| This interface supports batch processing, assuming the number of data batches to be inferred is batch, and the number of model inputs is input_count, where the number of input sources for the resizer is resizer_count.
| Prepare input parameter input: The range of the array index of input for the i-th batch is [i * input\_count, (i + 1) * input\_count),i=[0,batch).
| Prepare input parameter rois: Each input source for the resizer should match a roi. The range of the array index of rois for the i-th batch is [i * resizer\_count, (i + 1) * resizer\_count),i=[0,batch). The order of rois in each batch should be consistent with the order of the inputs.
| Limit on the number of batch: The range should be [1, 255].
Model Limitations: The compilation parameter input_source of the model needs to be set to resizer during compilation, and the h*w of the model should be less than 18432.
When submitting a task using this interface, the taskHandle should be set to nullptr in advance, unless it is appending a task to the specified taskHandle (i.e. using the inferCtrlParam::more function).
The left and top values of the roi must be even, while the right and bottom values must be odd.
The size of the roi must satisfy the following requirements: 16 <= width < 256, 16 <= height < 256.
The scaling range is 0.5 < roi / src <= 8.
Currently, up to 32 model tasks can exist simultaneously.
API Example: Please refer to the roi_infer.sh instructions in Model Inference DNN API Usage Example Documentation for more details.
Model Limitations: During the model conversion, set the compilation parameter input_source to {'input_name': 'resizer'} to generate a resizer model. For specific parameter configuration details, refer to the introduction in PTQ Quantization Principles and Steps for Model Conversion.
Currently, NV12 data with multiple inputs is also supported. The commonly used output sizes (HxW) of the resizer are: 128x128, 128x64, 64x128, 160x96.
If using RDK Ultra, follow these rules:
input_count: Number of model input branchesoutput_count: Number of model output branchesresizer_count: Number of resizer input-source branches in the model (≤input_count). When the model processes a batch of data, one resizer input-source branch handles one roi.roiCount: Total number of rois, its value isbatch * resizer_countdata_batch: The number of data batches that the model needs to infer, its value isroiCount / resizer_countmodel_batch: The batch size used internally by the model, i.e., the batch_size input to the model during inference. D-Robotics Toolchain supports compiling the model as a batch model.
Input/Output Example Explanation:
Taking a more complex multi-input model as an example, let's assume the model has 3 input branches (2 resizer inputs, 1 ddr input) and 1 output branch, and is compiled with batch=2. The model needs to process a total of 3 batches of data, with 6 rois in total (i.e., 2 rois per data batch). Given the following information:
input_count= 3output_count= 1resizer_count= 2roiCount= 6data_batch= 3model_batch= 2
So for model inference, these three batches of data need to prepare input_count * data_batch = 9 input-tensors with independent addresses.
Assuming the static information of the model input/output is as follows:
-
Model Input (model_info):
- tensor_0_resizer: [2, 3, 128, 128]
- tensor_1_resizer: [2, 3, 256, 256]
- tensor_2_ddr: [2, 80, 1, 100]
-
Model Output (model_info):
- tensor_out: [2, 100, 1, 56]
Then the dynamic information of the model during inference is:
-
Model Input (input_tensors):
- [1x3x128x128, 1x3x256x256, 1x80x1x100, 1x3x128x128, 1x3x256x256, 1x80x1x100, 1x3x128x128, 1x3x256x256, 1x80x1x100]
-
Model Output (output_tensors):
- [4x100x1x56]
Here, because model_batch = 2, the underlying BPU can handle 2 batches of data in a single execution. And because data_batch = 3, the highest dimension of the output_tensor is calculated using the formula ceil[(data_batch) / model_batch] * model_batch, which is always a multiple of model_batch. This is also a hardware instruction requirement of the BPU, and any missing inputs will be automatically ignored during computation.
Interface Limitations Explanation:
- Regarding the
batchnumber limitation: its range should be [1, 255]. - When using this interface to submit a task,
taskHandleshould be set tonullptrin advance, unless it is appending a task to a specifictaskHandle(i.e., using theinferCtrlParam::morefunctionality). - The roi size requirement is:
2 <= width <= 4096,2 <= height <= 4096. - The original image size requirement is:
1 <= W <= 4096,16 <= stride <= 131072, andstridemust be a multiple of 16. - The output size requirement is:
2 <= Wout,2 <= Hout. - The roi scaling factor limit is:
0 <= step <= 262143, where the step is calculated using the formula:step = ((src_len - 1)*65536 + (dst_len - 1)/2)/(dst_len - 1), where src_len is the W or H of the roi and dst_len is the required W or H of the model. - Up to 32 model tasks can exist simultaneously.
hbDNNWaitTaskDone()
【Function prototype】
int32_t hbDNNWaitTaskDone(hbDNNTaskHandle_t taskHandle, int32_t timeout)
【Description】
Wait for task completion or timeout.
【Parameters】
- [in]
taskHandlePointer to the task handle. - [in]
timeoutTimeout configuration (in milliseconds).
【Return type】
- Returns
0if the API is executed successfully, otherwise it fails.
timeout > 0indicates the waiting time;timeout <= 0indicates waiting until the task is completed.
hbDNNReleaseTask()
【Function prototype】
int32_t hbDNNReleaseTask(hbDNNTaskHandle_t taskHandle)
【Description】
Release the task. If the task is not executed, it will be canceled and released directly. If it has been executed, it will be canceled and released after running to certain nodes.
【Parameters】
- [in]
taskHandlePointer to the task handle.
【Return type】
- Returns
0if the API is executed successfully, otherwise it fails.