Visual-Inertial Odometry Algorithm
Overview
Visual-Inertial Odometry (VIO) is an algorithm that fuses camera and Inertial Measurement Unit (IMU) data to achieve robot localization. VIO localization has advantages such as low cost and wide applicability. In outdoor environments, it can effectively compensate for satellite positioning failure scenarios such as occlusion and multipath interference. Excellent and robust VIO algorithms are key to achieving high-precision outdoor navigation and localization.
Code repository: (https://github.com/D-Robotics/hobot_vio.git)
Supported Platforms
| Platform | Runtime | Example Features |
|---|---|---|
| RDK X3, RDK X3 Module | Ubuntu 20.04 (Foxy), Ubuntu 22.04 (Humble) | Use RealSense image and IMU data as algorithm input; algorithm outputs robot motion trajectory, which can be visualized on rviz2 on PC |
| RDK X5, RDK X5 Module | Ubuntu 22.04 (Humble) | Use RealSense image and IMU data as algorithm input; algorithm outputs robot motion trajectory, which can be visualized on rviz2 on PC |
Preparation
-
RDK has been flashed with the Ubuntu system image.
-
TogetheROS.Bot and the RealSense ROS2 Package have been successfully installed on RDK.
-
RealSense camera, connected to the RDK USB 3.0 port.
-
Confirm that the PC can access RDK over the network.
Usage
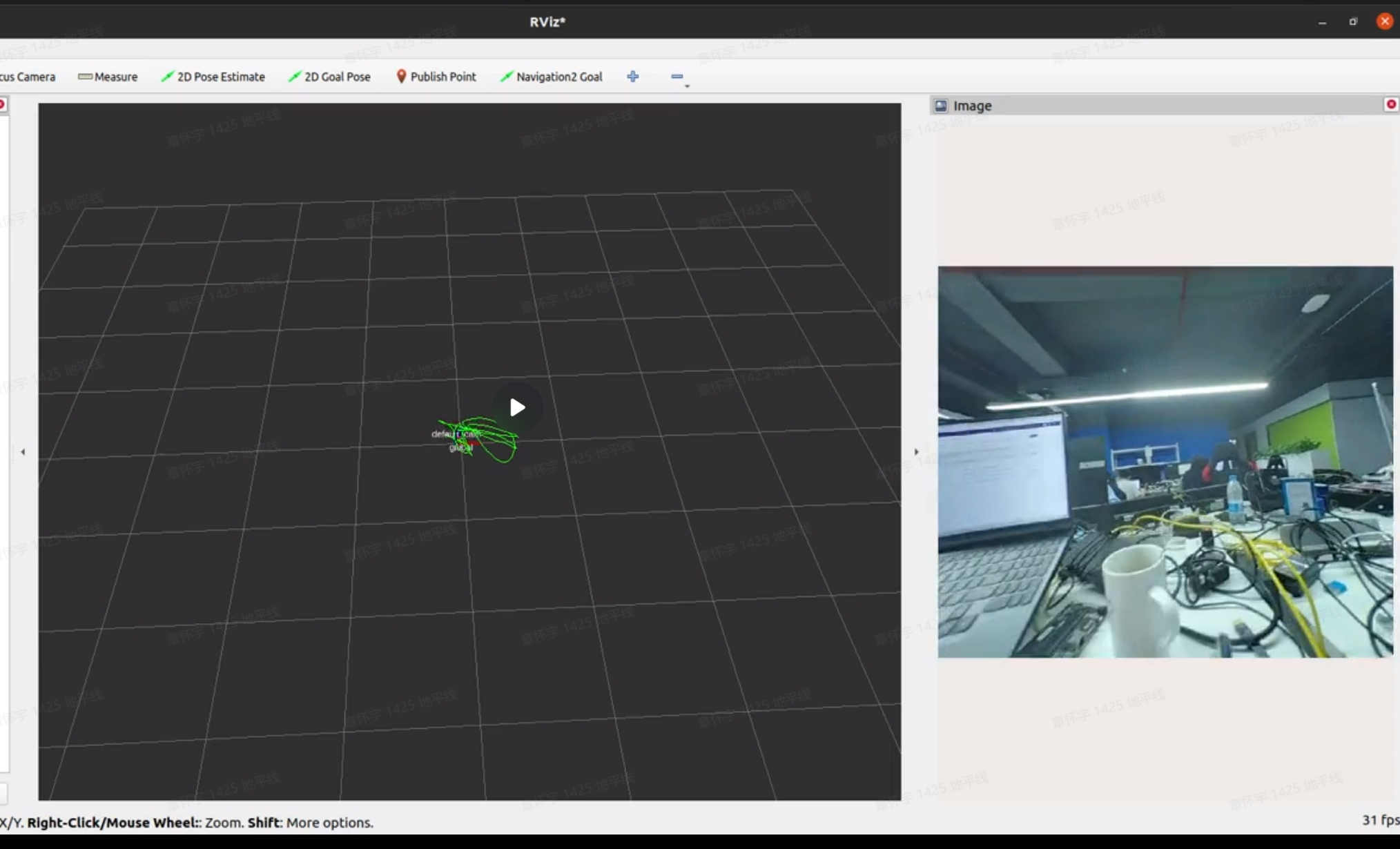
The algorithm subscribes to RealSense camera image and IMU data as input, computes camera trajectory information, and publishes camera motion trajectory through the ROS2 topic mechanism. Trajectory results can be viewed in rviz2 on PC. The algorithm input and output topics are shown in the tables below:
Input Topics
| Parameter | Type | Description | Required | Default Value |
|---|---|---|---|---|
| path_config | std::string | VIO algorithm configuration file path | Yes | /opt/tros/${TROS_DISTRO}/lib/hobot_vio/config/realsenseD435i.yaml |
| image_topic | std::string | Image data topic name subscribed by the VIO algorithm | Yes | /camera/infra1/image_rect_raw |
| imu_topic | std::string | IMU data topic name subscribed by the VIO algorithm | Yes | /camera/imu |
| sample_gap | std::string | VIO algorithm processing frequency. 1 means every frame participates in trajectory computation; 2 means compute once every two frames, and so on | Yes | 2 |
Output Topics
| Topic Name | Type | Description |
|---|---|---|
| horizon_vio/horizon_vio_path | nav_msgs::msg::Path | Robot motion trajectory output by the VIO algorithm |
Startup command:
- Foxy
- Humble
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
ros2 launch hobot_vio hobot_vio.launch.py
Result Analysis
After starting the algorithm example on RDK, the runtime terminal outputs the following information. First, the RealSense node starts and publishes image and IMU data. Then the algorithm enters the initialization process, waiting for the user to translate the camera to complete initialization. After initialization completes, the algorithm begins outputting localization coordinates:
[INFO] [launch]: All log files can be found below /root/.ros/log/2023-07-07-19-48-31-464088-ubuntu-562910
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [hobot_vio-1]: process started with pid [563077]
[INFO] [ros2 launch realsense2_camera rs_launch.py depth_module.profile:=640x480x30 enable_depth:=false enable_color:=false enable_gyro:=true enable_accel:=true enable_sync:=true gyro_fps:=200 accel_fps:=200 unite_imu_method:=2 enable_infra1:=true-2]: process started with pid [563081]
[hobot_vio-1] T_CtoI:
[hobot_vio-1] 0.999934 0.0103587 0.0049969 0.0270761
[hobot_vio-1] -0.0104067 0.999899 0.00967935 -0.00272628
[hobot_vio-1] -0.00489613 -0.00973072 0.999941 -0.0518149
[hobot_vio-1] 0 0 0 1
[hobot_vio-1] system use_rtk_: 0
[hobot_vio-1] [static initializer] not enough imu readings
[hobot_vio-1] [static initializer] not enough imu readings
[hobot_vio-1] [static initializer] IMU belows th 0.011508, 0.00274453 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.0105996, 0.00273085 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.00964632, 0.00280866 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.00892132, 0.00279346 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.00816016, 0.00281761 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.00776753, 0.00277049 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.00744219, 0.00274874 < 0.5, 0
[hobot_vio-1] [static initializer] IMU belows th 0.420251, 0.36058 < 0.5, 0
[hobot_vio-1] HorizonVIO Successfully initialized!
[hobot_vio-1] [WARN] [1688730518.534178615] [horizon_vio_node]: Localization position[x, y, z]: [0.0225533, -0.0504654, 0.00943574]
[hobot_vio-1] [WARN] [1688730518.534634139] [horizon_vio_node]: Image time 1688730518.314490318
[hobot_vio-1] [WARN] [1688730518.621440869] [horizon_vio_node]: Localization position[x, y, z]: [0.0231779, -0.0533648, 0.00787081]
[hobot_vio-1] [WARN] [1688730518.621558739] [horizon_vio_node]: Image time 1688730518.380982161
[hobot_vio-1] [WARN] [1688730518.743525086] [horizon_vio_node]: Localization position[x, y, z]: [0.0290396, -0.0610474, 0.0106718]
[hobot_vio-1] [WARN] [1688730518.743637249] [horizon_vio_node]: Image time 1688730518.447472572
[hobot_vio-1] [WARN] [1688730518.866076119] [horizon_vio_node]: Localization position[x, y, z]: [0.0381324, -0.0737757, 0.0164843]
[hobot_vio-1] [WARN] [1688730518.866186156] [horizon_vio_node]: Image time 1688730518.513962030
[hobot_vio-1] SLAM feats: 0
[hobot_vio-1] KF feats: 338
[hobot_vio-1] 132.853 ms all consumed
[hobot_vio-1] travel(m): 0.000
[hobot_vio-1] [WARN] [1688730519.002002975] [horizon_vio_node]: Localization position[x, y, z]: [0.05018, -0.088422, 0.0240244]
[hobot_vio-1] [WARN] [1688730519.002130095] [horizon_vio_node]: Image time 1688730518.580449104
[hobot_vio-1] SLAM feats: 0
[hobot_vio-1] KF feats: 31
[hobot_vio-1] 142.996 ms all consumed
[hobot_vio-1] travel(m): 0.014
[hobot_vio-1] [WARN] [1688730519.146149433] [horizon_vio_node]: Localization position[x, y, z]: [0.0167176, -0.0189649, 0.0588413]
[hobot_vio-1] [WARN] [1688730519.146279428] [horizon_vio_node]: Image time 1688730518.646935701
[hobot_vio-1] SLAM feats: 0
[hobot_vio-1] KF feats: 26
[hobot_vio-1] 96.911 ms all consumed
[hobot_vio-1] travel(m): 0.025
[hobot_vio-1] [WARN] [1688730519.244168068] [horizon_vio_node]: Localization position[x, y, z]: [0.000805884, 0.0134815, 0.0730707]
[hobot_vio-1] [WARN] [1688730519.244270439] [horizon_vio_node]: Image time 1688730518.713421583
[hobot_vio-1] SLAM feats: 0
[hobot_vio-1] KF feats: 23
[hobot_vio-1] 52.470 ms all consumed
[hobot_vio-1] travel(m): 0.034
[hobot_vio-1] [WARN] [1688730519.297642444] [horizon_vio_node]: Localization position[x, y, z]: [0.00226324, 0.0120054, 0.0796328]
[hobot_vio-1] [WARN] [1688730519.297738190] [horizon_vio_node]: Image time 1688730518.779906034
[hobot_vio-1] SLAM feats: 0
[hobot_vio-1] KF feats: 33
[hobot_vio-1] 47.407 ms all consumed
[hobot_vio-1] travel(m): 0.042