视觉移动Solution套件使用手册
1. 功能介绍
基于 D-Robotics RDK X5 平台,面向室内移动机器人场景,提供软硬结合、深度优化、低成本、开箱即用的全栈纯视觉移动参考解决方案,帮助用户建立起移动机器人底层的核心和基础能力,推动智能机器人产品快速落地。支持轮式、四足、双足等不同机器人类型。
针对室内陪伴机器人,移动Solution提供了无感和断点续建的建图能力,使陪伴机器人从开箱时刻起就成为家庭的一员。机器人首次启动就能够立刻和人互动,无需等待,在互动的过程中自动完成建图。同时在家庭复杂环境下能够自主避障和自动脱困,不制造麻烦。得益于Lifelong的SLAM能力,机器人在使用的过程中持续进化,越来越”懂家”,越用越聪明。使移动Solution成为家庭智能服务的隐形守护者。
移动Solution包含双目深度估计、VSLAM(6DoF位姿估计、重定位、Lifelong实时3D建图)、障碍物识别、导航和避障、以及用于开发的工具箱。
极简&低成本硬件:
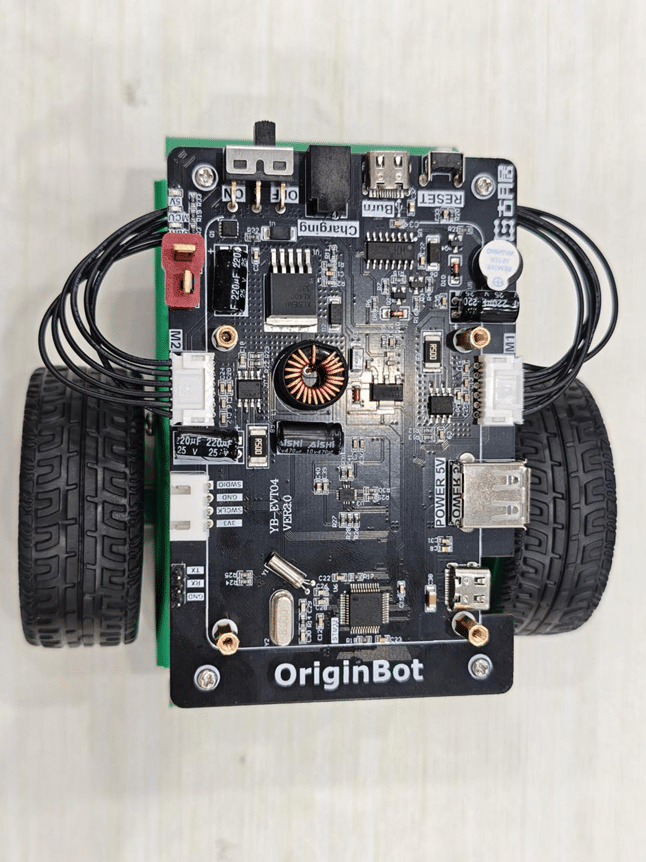
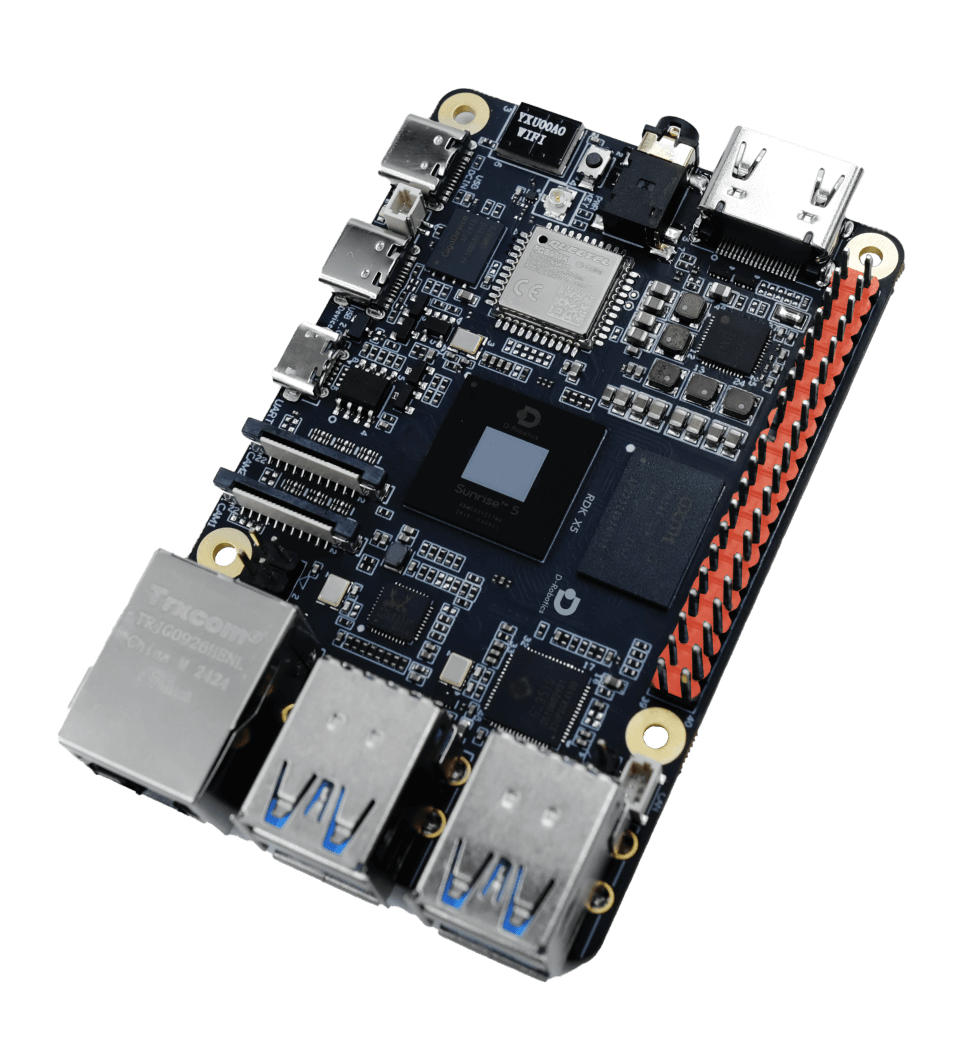
| 移动底盘 | RDK X5 | 双目相机 | → | 组装后 |
|---|---|---|---|---|
 |
 |
 |
→ |  |
纯视觉 & Lifelong & 实时 3D建图和导航效果:
1.1 系统框架
整个系统只使用双目相机一个传感器,相机驱动已对双目RGB图像和IMU两种数据进行了时间同步。
flowchart TD
subgraph SRC[Sensor]
cam[stereo cam with IMU]
end
subgraph PERC[Perception System]
sde[stereo depth estimation]
yolov8_seg[yolov8-seg]
proj[projection]
end
subgraph SLAM[SLAM System]
front_vio[front end VIO]
back_end[back end]
end
subgraph OBS_REC[Obstacle Recognition]
gen_obs_recog[general obs recog]
pcl2grid[pcl to grid]
end
subgraph explore[Autonomous Exploration]
frontier_search[frontier search]
loop_trigger[loop closure trigger]
reloc_strategy[relocating strategy]
mode_switch[mapping/localization switch]
trapped_recovery[trapped recovery]
end
subgraph NAV[Nav2 System]
nav_frame[navigation framework]
end
%% 输入源分发
cam -->|Stereo RGB Images| sde
cam -->|RGB Image| yolov8_seg
cam -->|Stereo RGB Images| front_vio
cam -->|IMU| front_vio
%% 感知系统内部流向
sde -->|pcl| gen_obs_recog
sde -->|depth| proj
yolov8_seg -->|instance seg| proj
%% back_end
proj -->|masked depth| back_end
front_vio -->|odom| back_end
%% 障碍物识别系统内部流向
gen_obs_recog -->|general obstacle pcl| pcl2grid
%% 跨系统数据交互
back_end -->|slam info| mode_switch
back_end -->|slam info| loop_trigger
back_end -->|slam info| reloc_strategy
nav_frame -->|costmap| frontier_search
proj -->|semantic obstacle pcl| pcl2grid
pcl2grid -->|dynamic grid map| nav_frame
back_end -->|static grid map| nav_frame
back_end -->|pose and tf| nav_frame
frontier_search -->|goal| nav_frame
reloc_strategy -->|goal| nav_frame
loop_trigger -->|goal| nav_frame
trapped_recovery -->|goal| nav_frame
mode_switch -->|mode| back_end
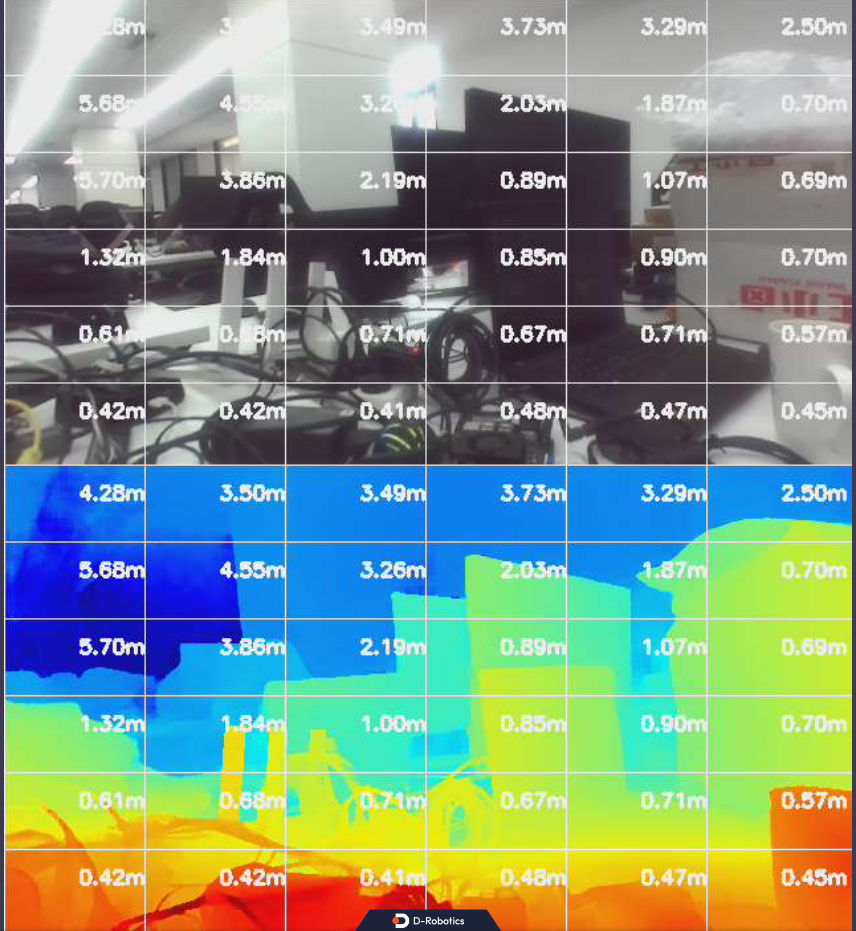
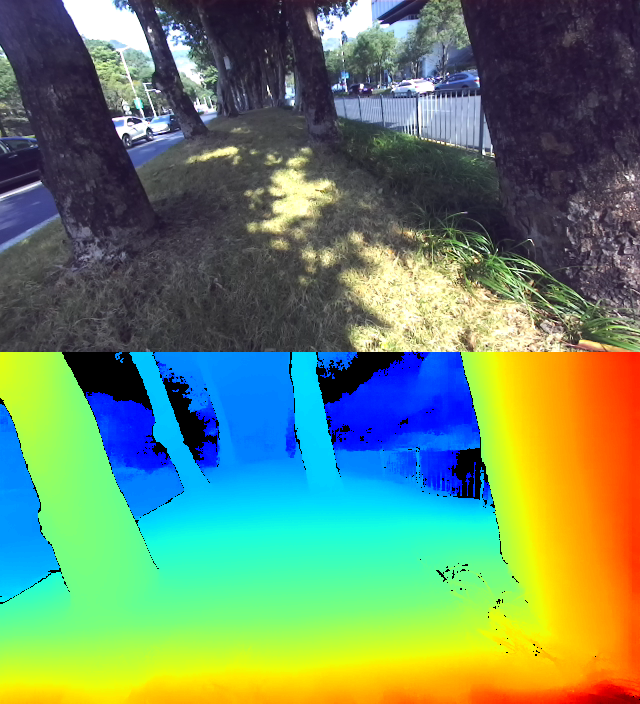
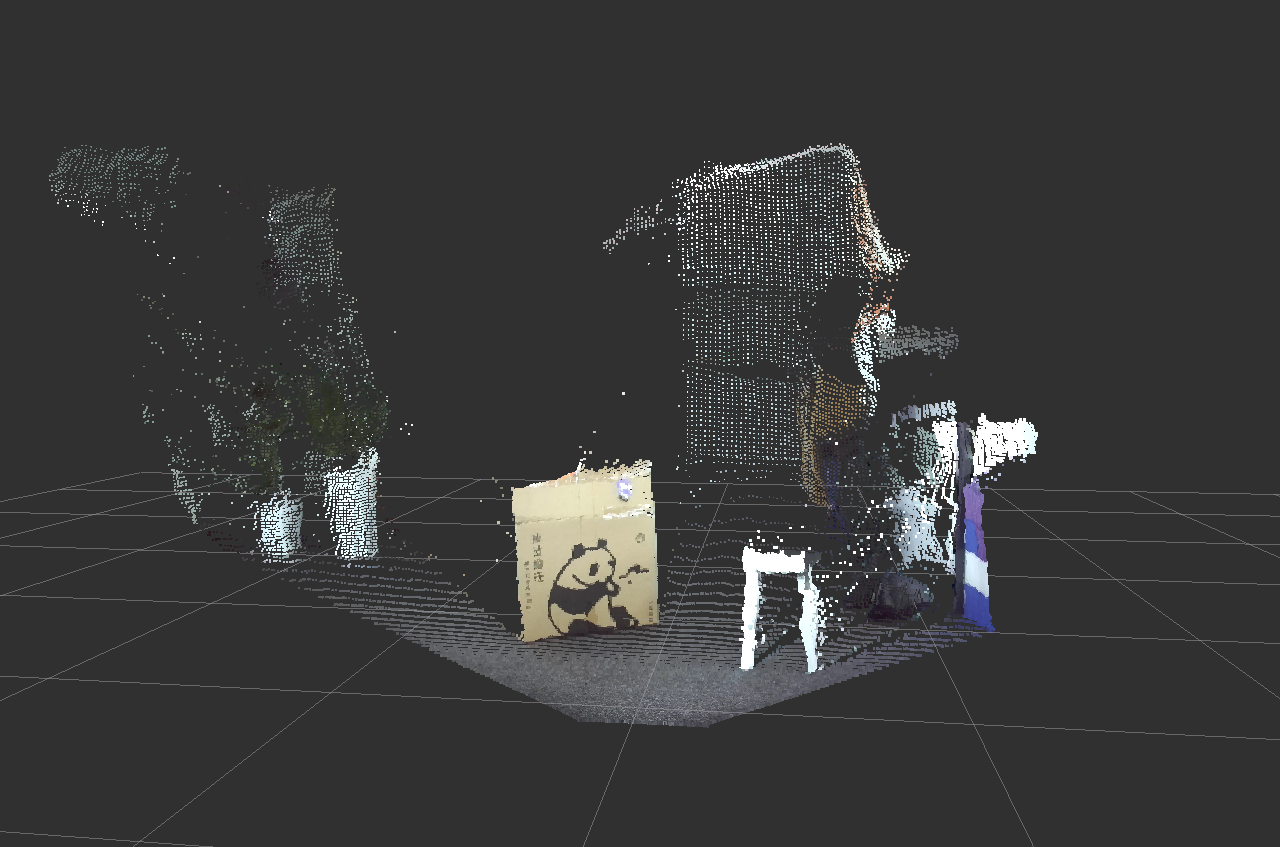
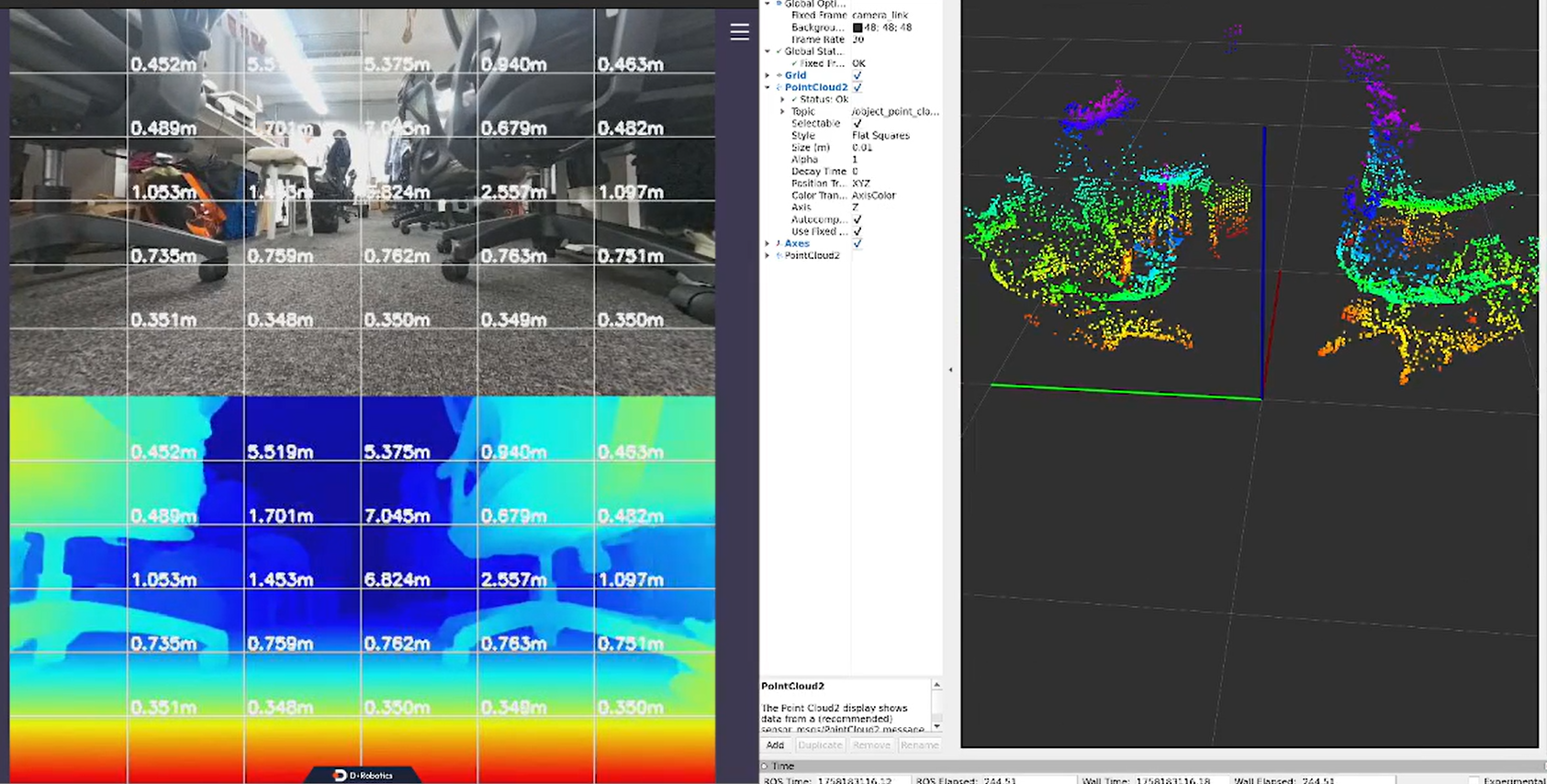
1.2 双目深度估计
地瓜自研的采用GRU架构的双目深度估计算法,输入为双目图像数据,输出为左视图对应的视差图、深度图和点云,具有较好的数据泛化性和较高的推理效率。算法详细介绍:双目深度算法。
| 双目左图和视差图(室内) | 双目左图和视差图(室外) | 点云 |
|---|---|---|
 |
 |
 |
1.3 VSLAM
移动Solution中的VSLAM算法资源占用低(前端VIO占用1.5个CPU@8fps,后端回环和建图占用1个CPU),支持重定位,能够在动态场景下实时重建出场景的3D地图,可用于机器人6DoF位姿估计以及下游的导航和操作任务,同时具备Lifelong的能力。
1.3.1 VIO
VSLAM前端是一个基于双目图像和 IMU 的视觉惯性里程计 (VIO) 算法,用于在线持续估计设备6DoF位姿、速度和轨迹,并输出可用于定位、可视化或下游融合的里程计结果。
1.3.2 回环
VSLAM通过后端回环,消除前端VIO的累积误差,从而提升VIO的定位精度。
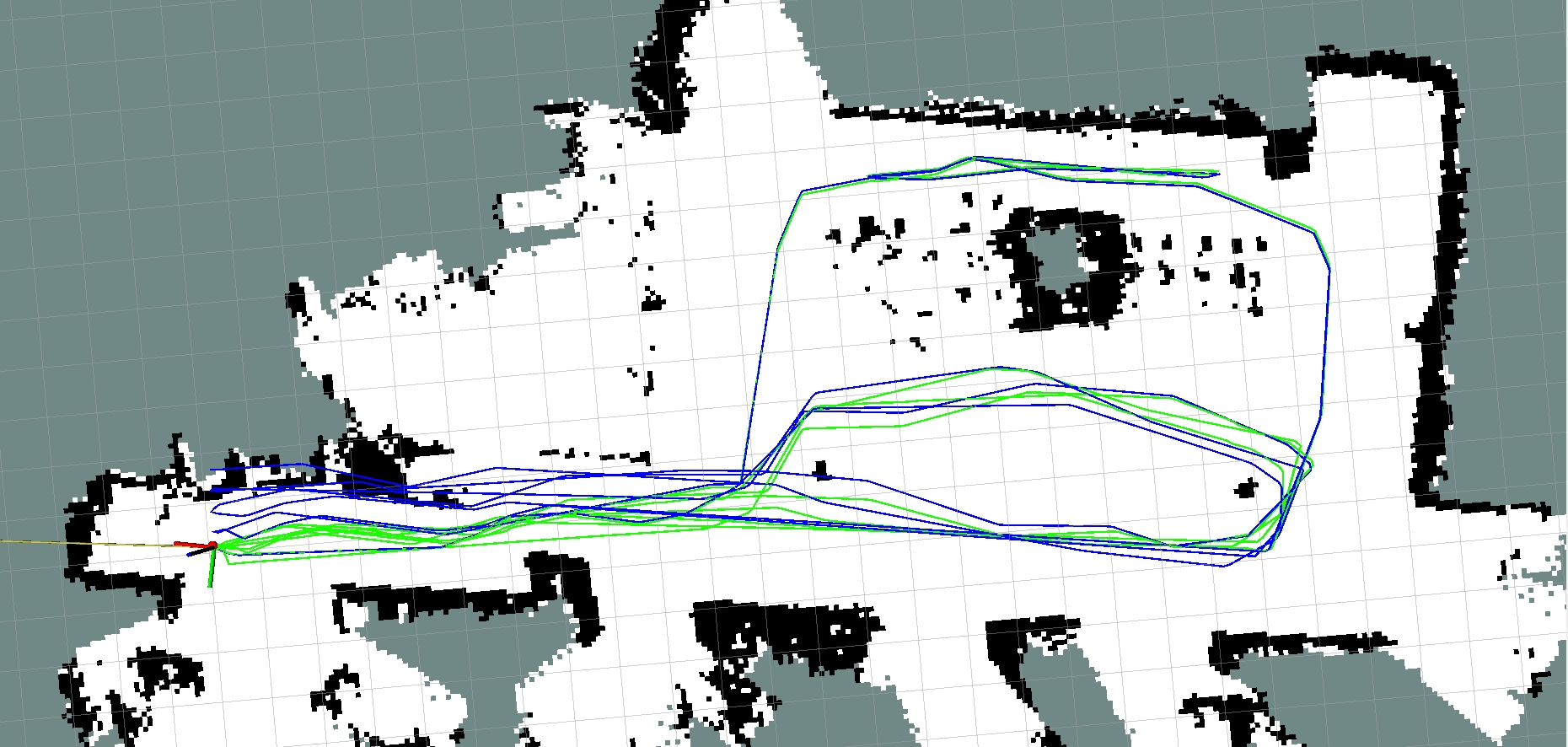
如下图,机器人移动4圈回到起点,轨迹总长度100米,每次回到起点map轨迹(有回环)都能闭合,里程计(无回环)轨迹持续漂移,最终里程计定位偏差为80cm。
| 回环轨迹(绿色)和里程计轨迹(蓝色) | 运动轨迹和回环 |
|---|---|
 |
 |
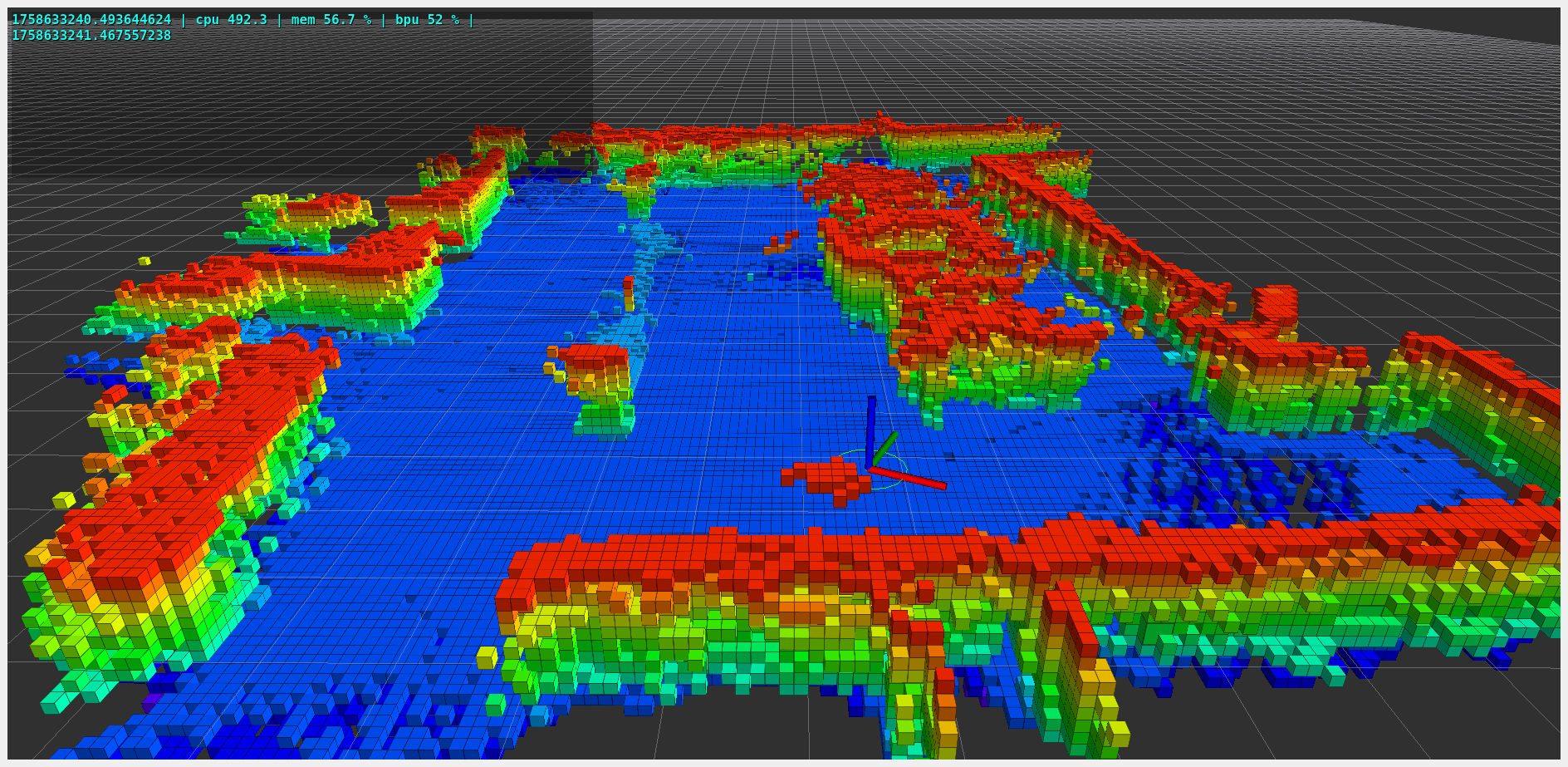
1.3.3 3D建图
VSLAM支持构建3D地图,可用于机器人定位以及下游导航和操作任务。
| 3D地图 | 3D建图过程 |
|---|---|
 |
 |
1.3.4 重定位
支持机器人在启动时和劫持后的重定位。
如下图,机器人被劫持后,在7秒内完成重定位。
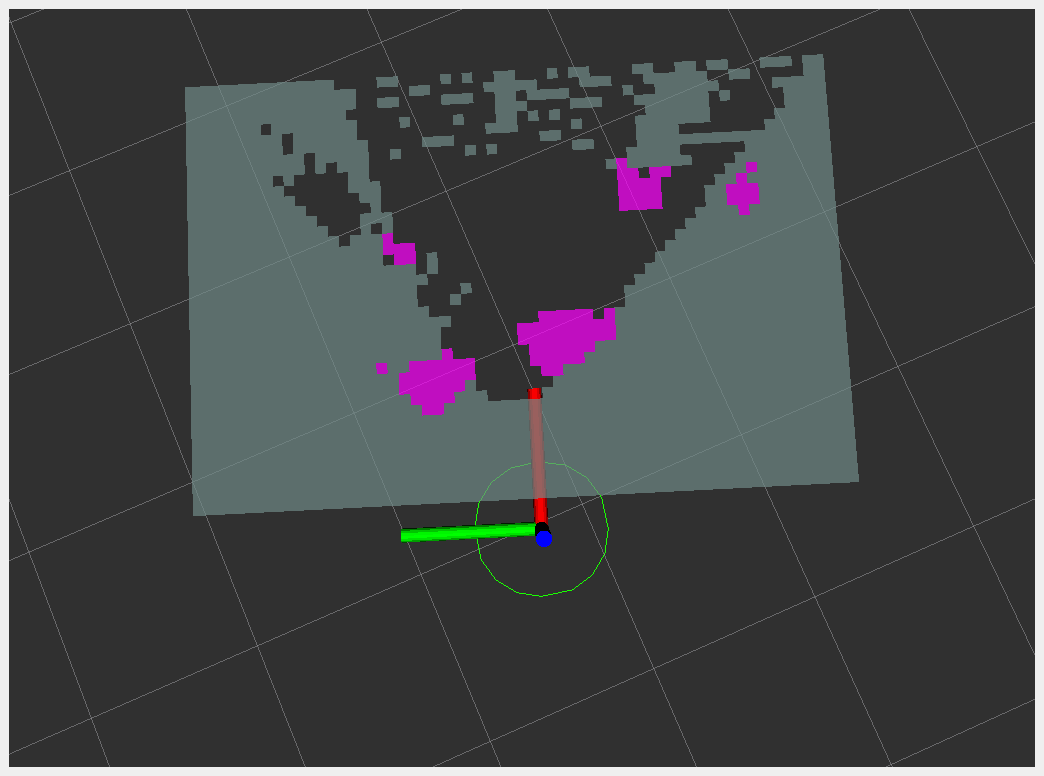
1.3.5 动态障碍物去除
去除环境中的动态障碍物(例如室内的人),避免其干扰SLAM定位和建图。
如下图,人被识别为动态障碍物(地图中红色区域),未标记在SLAM的静态地图中(黑色区域)。
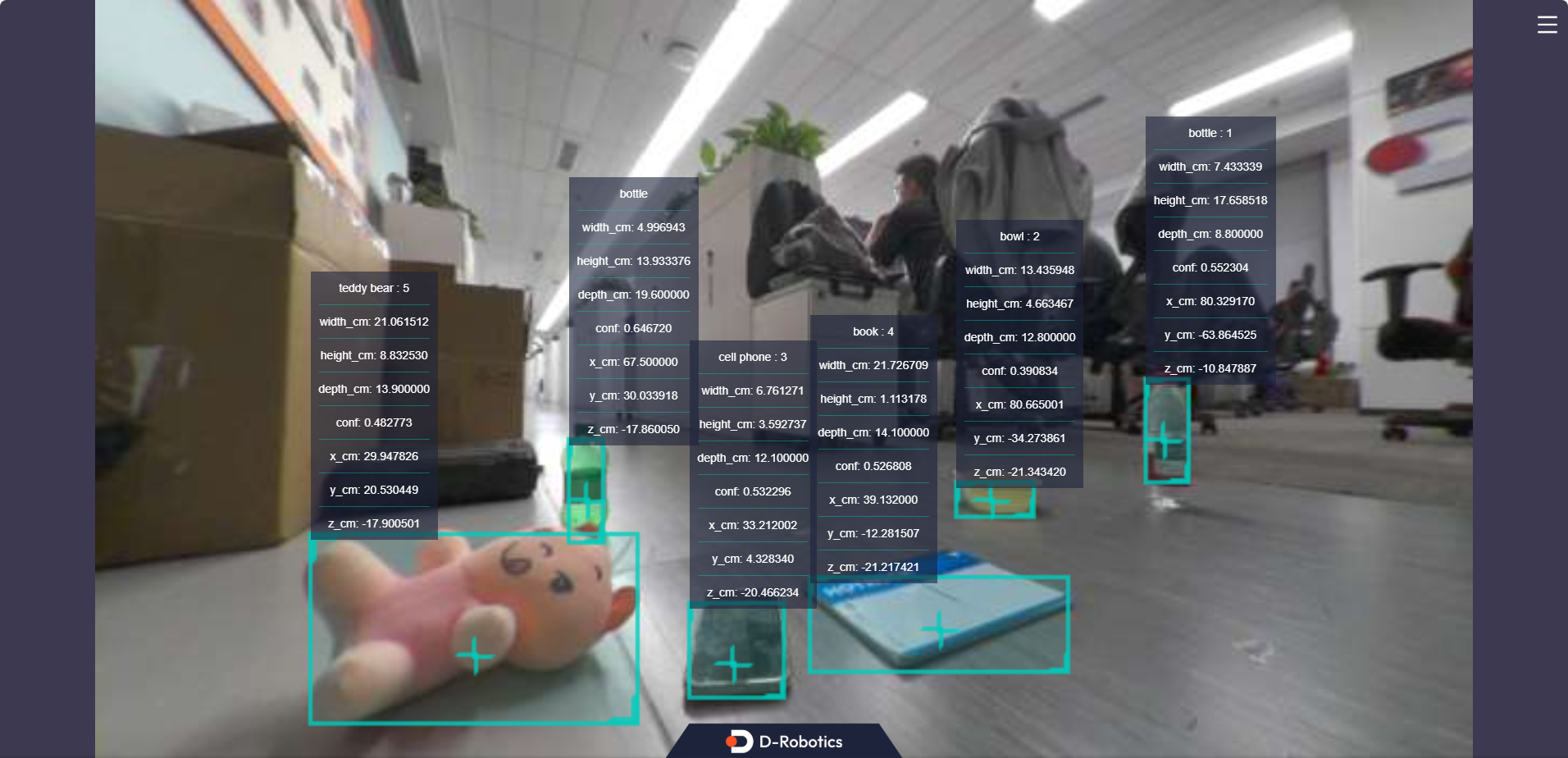
1.4 障碍物识别
提供了视觉语义障碍物识别和通用障碍物识别算法。
其中视觉语义障碍物识别算法能够识别出lidar无法识别的低矮/小尺寸障碍物,以及对应的障碍物语义信息。例如积木、书本、小玩偶等家庭常见障碍物。通用障碍物识别算法能够识别出一定尺寸范围的任意类别的障碍物。两种算法结合,保证了机器人能够识别出障碍物并绕障。
此外,障碍物识别具有低延迟的优势,保证了避障的及时性。从障碍物出现到识别成功并控制机器人,整个流程最大延迟为0.35秒(平均0.28秒),在机器人以0.2m/s速度移动的情况下,安全距离为7.0cm。
| 语义障碍物类别、尺寸和坐标信息 | 语义障碍物地图 | 通用障碍物点云 |
|---|---|---|
 |
 |
 |
1.5 导航和避障
基于nav2框架,结合视觉传感器特性(相较于Lidar,相机FOV小),提供了深度优化的规划和避障算法,提升算法规划和避障的成功率和效率。
-
动态障碍物管理算法:引入障碍物的生命期管理和概率地图,提升避障和路径规划的成功率和效率。
-
环境探索算法:引入盲区地图和盲区探测算法,路径规划失败或者路径抖动情况下的路径搜索算法,解决由于相机视野盲区导致的碰撞问题。
-
优化的DWB控制算法:解决大转弯角度等特殊路径情况下轨迹规划失败的问题。
| 避障小物体 | 长距离导航 |
|---|---|
 |
 |
1.6 自主探索
自主探索功能会实时获取机器人状态、空间状态和任务状态信息,通过自主探索环境和管理系统状态,在用户无感的情况下,高效的完成复杂的任务。 实现开机即用(用户直接和机器人交互,无需预先建好图),越用越聪明。
其核心功能包括:
- 未知环境下自主探索建图 — 自动搜索地图边界frontier并导航前往,用户零干预下完成地图构建任务。
- 回环检测(loop closure)触发 — 自动触发回环检测,提升定位精度和地图质量。
- 重定位(relocating)策略 — 丢失定位时自动触发重定位策略,加速机器人恢复定位。
- SLAM模式切换 — mapping/localization模式自动切换,实现Lifelong SLAM。
- 脱困(trapped recovery) — 自动识别机器人是否被困,被困时自动脱困。
未知环境下探索建图:
1.7 工具
移动Solution提供了多种用于开发和分析问题的工具,具体如下表:
| 工具 | 功能 |
|---|---|
| 数据采集工装 | 双目深度估计算法迭代。 |
| 云平台 | 数据标注和管理、算法训练、模型转换等全栈的算法和数据管理平台。 |
| 双目深度估计算法可视化评测工具 | 评测双目深度估计算法量化指标,以及可视化分析指标误差情况。 |
| 标定工具 | 双目相机内参标定;相机和机器人底盘外参标定。 |
| 轨迹规划算法分析工具 | 可视化DWB轨迹规划算法的计算过程和结果,用于优化轨迹规划算法功能。 |
| 运行时latency统计工具 | 统计时间窗口内功能模块的latency,包括模块的输出帧率,输入、处理和输出的平均、最大和最小延迟等数据,用于识别和优化系统pipeline的latency瓶颈。 |
| rviz hud | 将机器人的关键行为和系统状态信息,以overlay的形式在rviz上渲染。 |
| 数据trigger & recorder | 用于路径规划时自动触发录制系统状态数据,通过离线回放数据定位问题,支持录制触发前的数据(影子模式)。 |
| rviz hud(左上区域) | 离线回放trigger自动录制的数据 |
|---|---|
 |
 |
1.8 资源占用
| 功能 | CPU占用(注1) | BPU占用(%) | MEM占用(注2) |
|---|---|---|---|
| 环境感知(注3) | 120 | 50 | 320 MB(5%) |
| VSLAM | 115 | 0 | 682 MB(9.6%) |
| 规控 | 100 | 0 | 271 MB(3.8%) |
| 其他(注4) | 30 | —— | —— |
| 总计 | 365(45.6%) | 51 | 1273 MB(18.4%) |
注1:X5总共8核CPU,总CPU为800%。
注2:采用8G版本RDK X5,可用内存大小6.9GB。统计内存时已建地图面积110㎡,关键帧数量461。
注3:包含双目数据采集、双目深度估计算法、VIO、视觉语义障碍物识别算法和通用障碍物识别算法,图像采集频率6fps,gdc硬件resize。
注4:包含自主探索、状态监控等功能。不包含rviz、ssh连接等调试工具。
统计命令:
-
CPU占用: ps -aux –sort=%cpu
-
BPU占用: hrut_somstatus
-
MEM占用: top -b -n 1 -o %MEM
2. 套件清单
| OriginBot移动底盘 | RDK Stereo Camera GS130WI | RDK X5 8G |
|---|---|---|
|
|
|
提示
3. 安装硬件
3.1 RDK X5上安装双目相机
SC132GS双目相机安装在RDK X5上的方法参考手册4.2. 硬件连接章节介绍。
3.2 底盘上安装 RDK X5
参考OriginBot智能机器人开源套件的安装处理器板卡章节内容,将RDK X5安装在OriginBot底盘上。
提示 给RDK X5供电的移动电源输出要求电压为5V,电流3A以上。
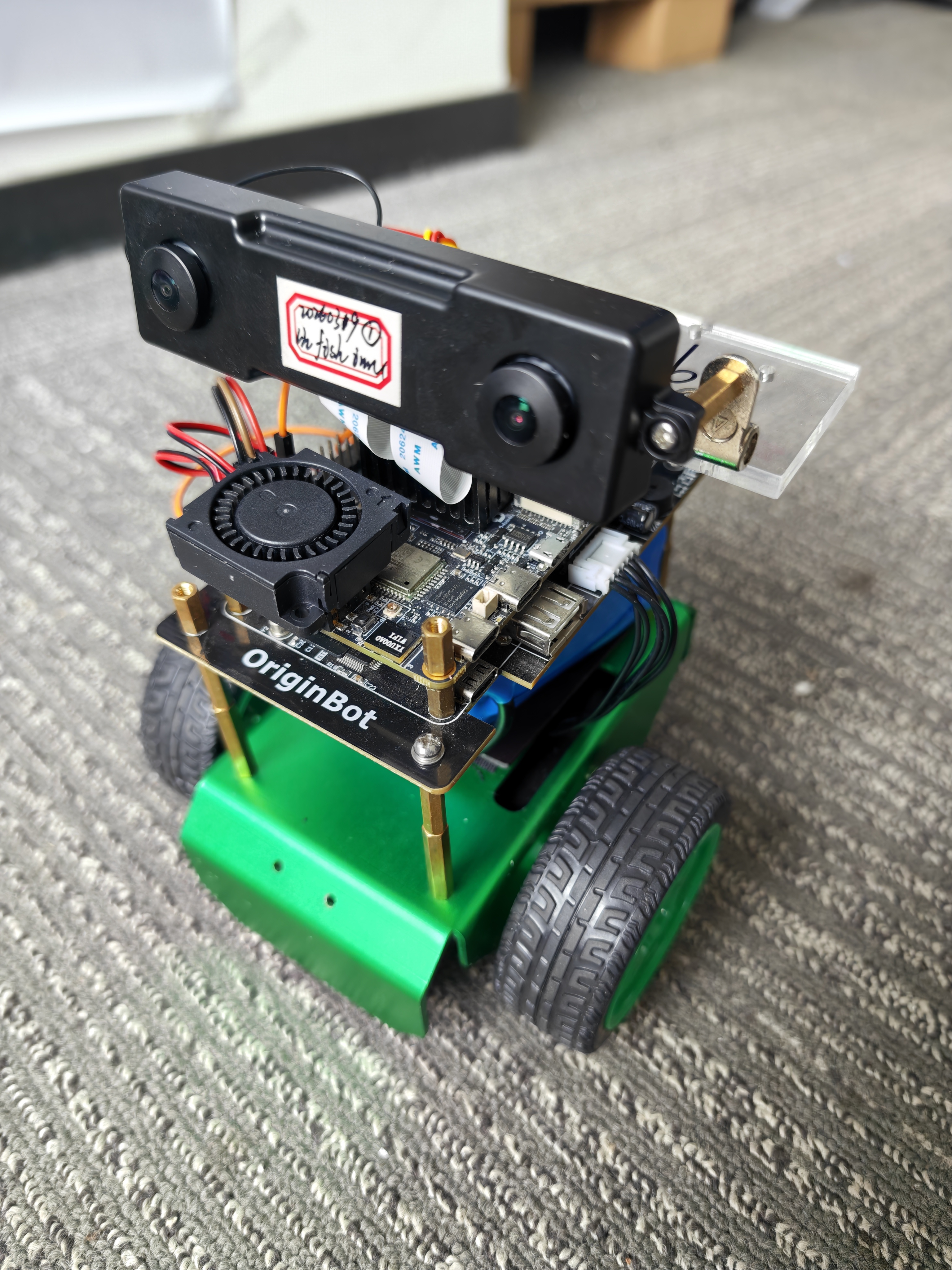
双目相机和RDK X5安装到OriginBot底盘上的效果图:
安装到其他底盘
参考本页面适配其他底盘章节。
4. 软件配置
4.1 系统和TROS
RDK X5已安装Ubuntu 22.04 desktop系统镜像,已安装TROS并升级到最新版本。
注意!请使用root用户名登录RDK X5。
SSH登录建议 建议PC使用Windows系统,并使用MobaXterm工具通过SSH连接RDK X5。
移动Solution套件版本依赖的TROS版本对应关系如下:
| 移动Solution套件版本号 | TROS版本号 |
|---|---|
| V0.0.5 | 2.5.2 |
移动Solution套件版本发布记录请查看版本发布记录章节。查看版本方法参考软件配置章节。
查看当前TROS版本命令:apt show tros-humble,详细参考查看当前TROS版本。
4.2 环境配置
配置CPU为性能模式和超频
终端下执行以下命令:
echo "echo 1 > /sys/devices/system/cpu/cpufreq/boost" >> ~/.bashrc
echo "echo performance > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor" >> ~/.bashrc
echo "echo performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor" >> ~/.bashrc
配置ROS Domain ID
终端下执行以下命令:
# 使用命令export ROS_DOMAIN_ID=<your_domain_id>配置ROS Domain ID,其中<your_domain_id>的取值范围是[0, 101]
# 例如export ROS_DOMAIN_ID=42
# 将配置命令放在启动脚本中执行
echo "export ROS_DOMAIN_ID=42" >> ~/.bashrc
使用cyclonedds
终端下执行以下命令,将配置命令放在启动脚本中执行,使每个终端生效:
echo "export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp" >> ~/.bashrc
4.3 安装依赖
安装ROS功能包
在RDK X5上执行如下命令,安装必要的软件:
apt update
apt upgrade -y
apt install ros-dev-tools ros-humble-cyclonedds* ros-humble-rmw-cyclonedds* ros-humble-rviz* ros-humble-rtabmap* ros-humble-octomap-rviz-plugins ros-humble-teleop-twist-keyboard ros-humble-nav* ros-humble-robot-localization -y
提示
- 如遇到执行apt命令速度慢的问题,可以尝试使用社区中广受好评的第三方ROS安装工具,例如“小鱼的一键安装系列”(FishROS)。这些工具通常会处理好软件源配置、依赖安装等繁琐步骤。
- 例如使用“小鱼的一键安装系列”更新软件源命令:wget http://fishros.com/install -O fishros && bash fishros,选择[5] 一键配置:系统源,后续根据提示进行选择。配置完成后如果遇到apt安装ROS2包失败,请更新ros签名:sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg。
- 配置完成后如果遇到apt安装ROS2包失败,请更新ros签名:sudo curl -sSL -o /usr/share/keyrings/ros-archive-keyring.gpg。
安装yq
安装yq,用于处理 YAML 的命令行工具。
wget https://github.com/mikefarah/yq/releases/latest/download/yq_linux_arm64 -O /usr/local/bin/yq
chmod +x /usr/local/bin/yq
yq --version
4.4 安装移动Solution
mkdir /userdata/vims
mkdir /userdata/rtabmap
cd /userdata/vims
wget https://archive.d-robotics.cc/TogetheROS/files/vision_mobile_solution/install-vims-v0.0.5.tar.gz
tar -zxvf /userdata/vims/install-vims-v0.0.5.tar.gz -C /userdata/vims
4.5 配置相机
更新驱动
基于RDK X5 3.5.0版本系统,使用以下3个安装包更新驱动(拷贝到X5后使用dpkg -i hobot-*安装)。
wget https://archive.d-robotics.cc/TogetheROS/files/vision_mobile_solution/deb/hobot-kernel-headers_3.0.4-20260514041655_arm64.deb
wget https://archive.d-robotics.cc/TogetheROS/files/vision_mobile_solution/deb/hobot-boot_3.1.0-20260514041708_arm64.deb
wget https://archive.d-robotics.cc/TogetheROS/files/vision_mobile_solution/deb/hobot-dtb_3.0.8-20260514041655_arm64.deb
sudo dpkg -i hobot-kernel-headers_3.0.4-20260514041655_arm64.deb hobot-boot_3.1.0-20260514041708_arm64.deb hobot-dtb_3.0.8-20260514041655_arm64.deb
连接硬件
参考4.2. 硬件连接。
配置软件
参考RDK X5配置。
4.6 配置生效
reboot重启RDK X5,使配置生效。
4.7 查看软件版本号
软件安装完成后,RDK X5终端输入如下命令,查看套件版本号:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
grep "<version>" `ros2 pkg prefix tros_vision_nav --share`/package.xml
输出如下信息(以0.0.1版本为例):

5. 基础功能测试
测试双目数据采集和深度估计。
安装完成双目相机后,RDK X5上运行如下命令,启动双目数据采集和深度估计:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
ros2 launch hobot_stereonet stereonet_model_web_visual_component_v2.4_int16_uncertainty.launch.py mipi_image_width:=640 mipi_image_height:=352 mipi_rotation:=0.0 mipi_cal_alpha:=0.0 need_rectify:=False mipi_image_framerate:=20.0
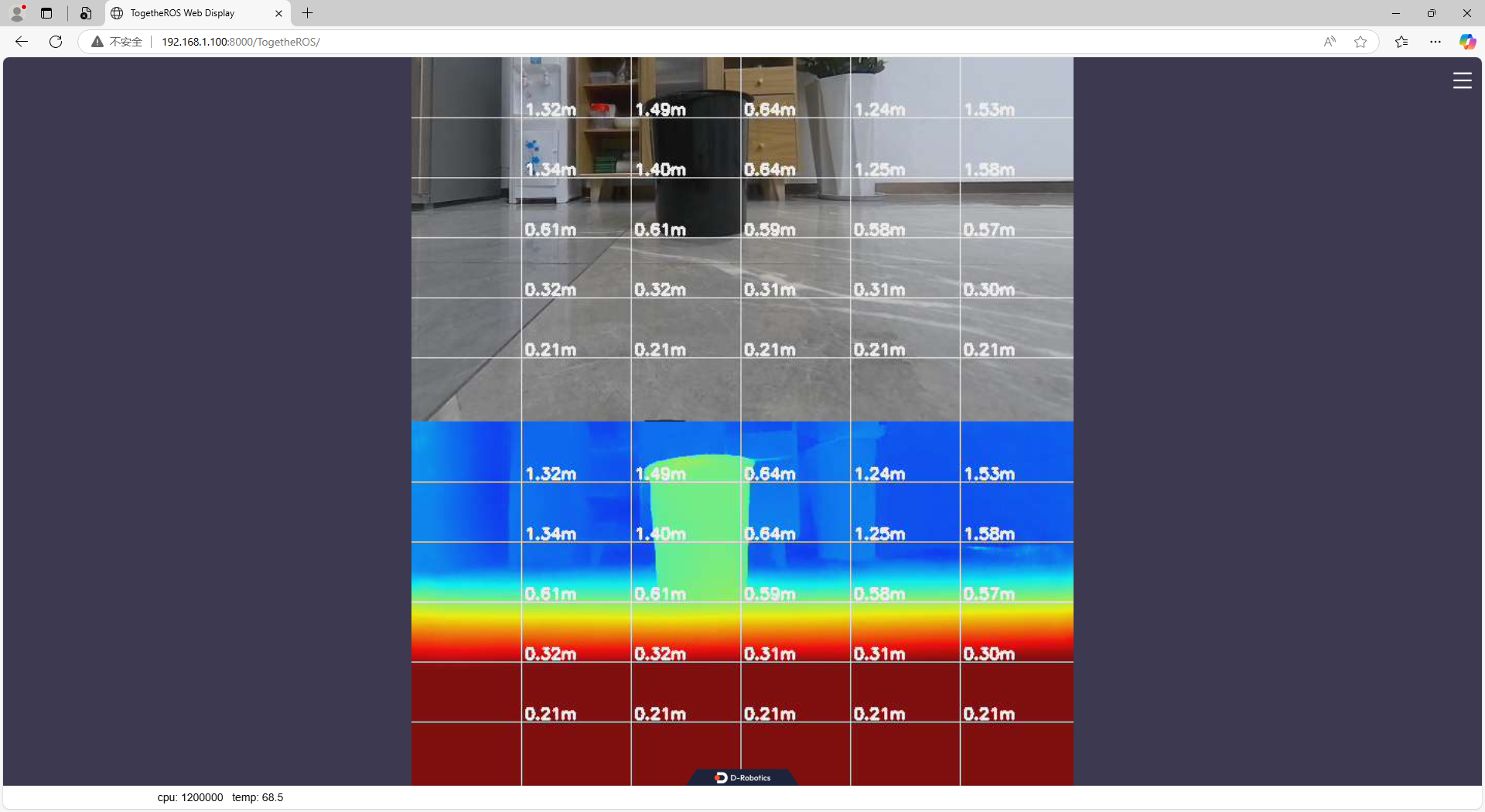
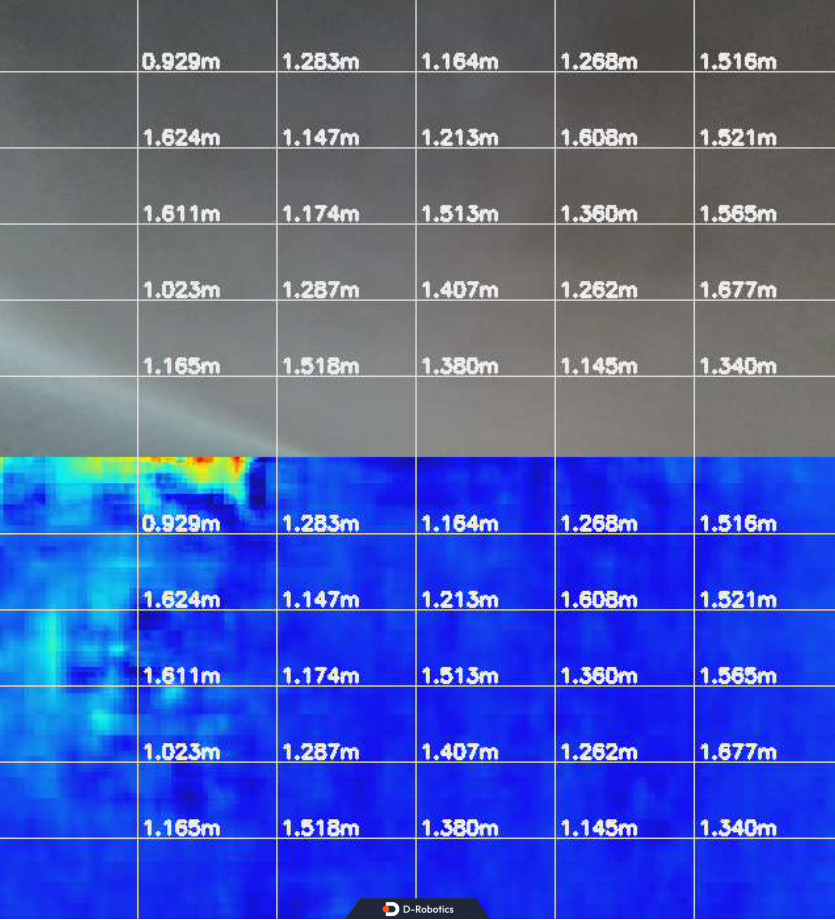
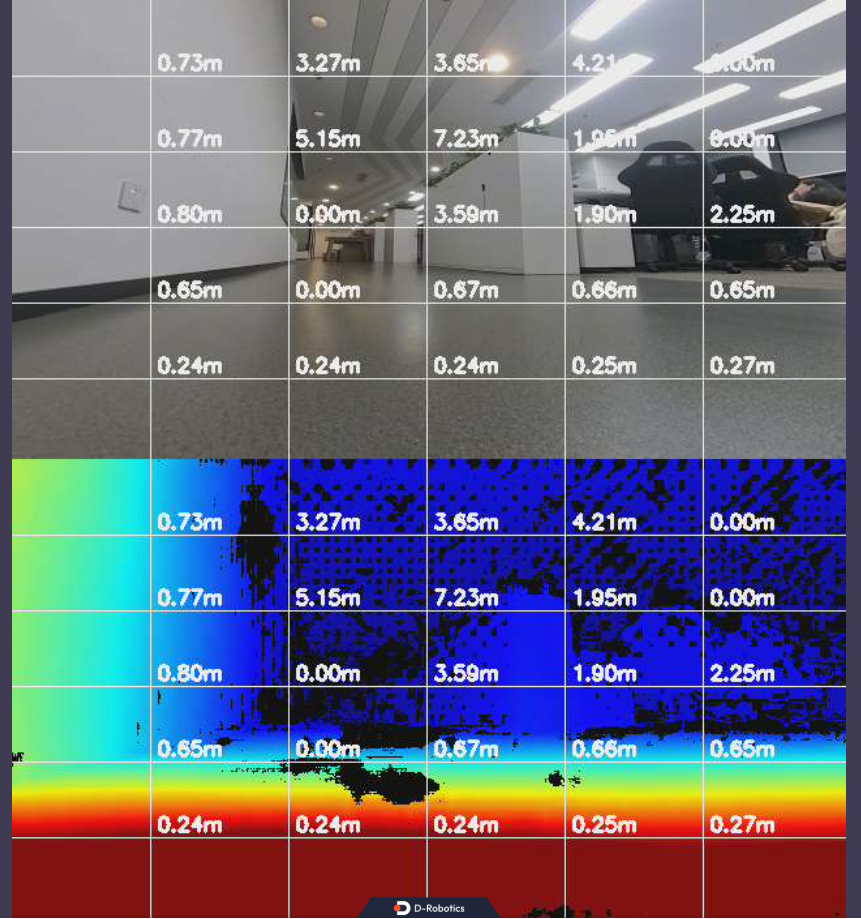
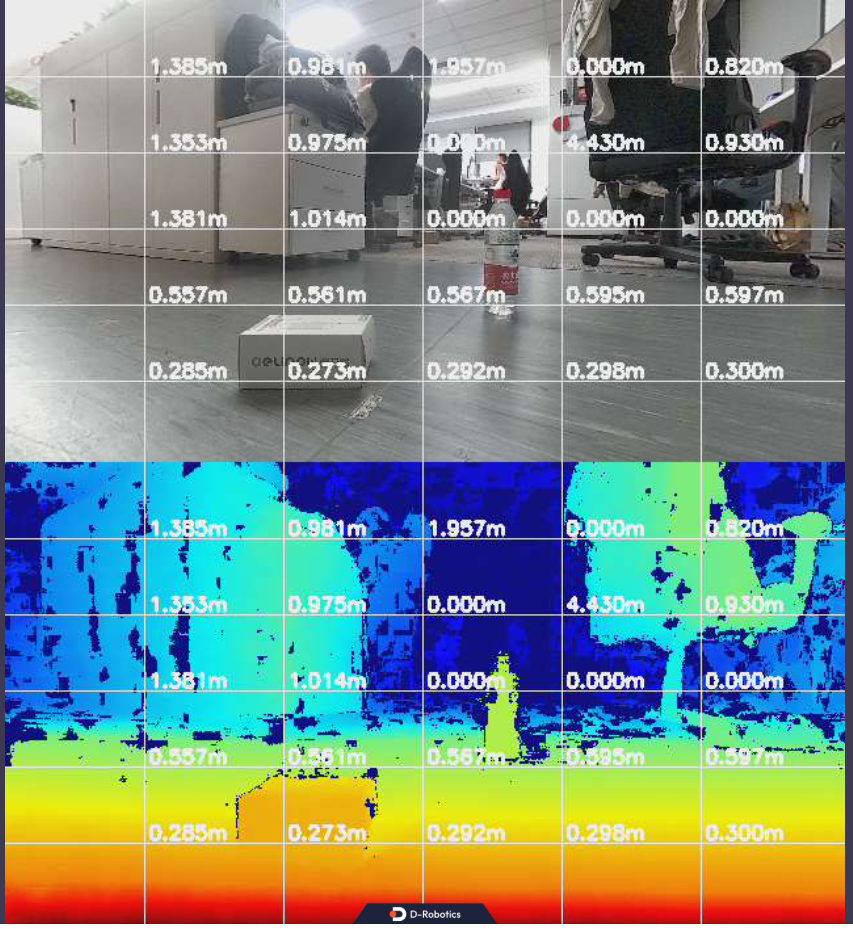
启动成功后,运行终端输出帧率统计信息(左下图)。PC端打开网页浏览器查看左目RGB图和深度图(右下图),在浏览器输入 http://ip:8000 (图中IP为RDK的WIFI IP地址,例如192.168.1.100)。
| 运行终端输出的帧率统计信息 | PC端网页浏览器查看左目RGB图(上)和深度图(下) |
|---|---|
 |
 |
如果启动失败,请参考双目深度算法使用手册排查问题。
如何验证双目相机的左右目是否连接正确 当相机的左右目接反时,程序能够正常运行,但是会导致深度估计错误。 遮住相机的左目,如果网页浏览器上显示的RGB图被遮挡,说明左右目接线正确。正确接线时,遮住左目图的现象如下:
| 遮住左目相机 | 网页浏览器上显示的RGB图被遮挡 |
|---|---|
 |
 |
6. 外参标定
以下两种情况下,需要重新执行标定: 首次使用安装包,或者重新更新了安装包。 双目相机安装位置发生变化时。
6.1 相机和底盘外参标定(粗标定)
本章节介绍不依赖标定治具的情况下,实现相机和底盘之间x, y, x, roll, pitch外参的快速粗标定。 此方法无法标定yaw角,如果相机和底盘之间yaw角较大,或者对标定精度有极高要求,请参考相机和底盘外参标定(高精度标定)进行标定。
简单、快速的粗标定能够满足基本使用需求,建议采用此标定方法。
标定平移向量XY
使用尺子测量相机左目和底盘base_footprint之间的XY偏移(右手坐标系,X为机器人朝向的正前方,Y向左,Z向上)。 标定参数说明和标定方法,及其和配置参数的对应关系,示例工装的标定结果如下表:
| 标定参数 | 说明 | 配置参数 | 标定结果 |
|---|---|---|---|
| X偏移 | 双目相机左目相对于底盘两个轮子连线,X方向的偏移 | robot_to_camera_x | 0.145 |
| Y偏移 | 双目相机左目相对于底盘两个轮子连线的中心点,Y方向的偏移 | robot_to_camera_y | 0.022 |
修改配置文件中calibration的参数,设置平移向量:
# 打开配置文件
source /userdata/vims/install/local_setup.bash
vi `ros2 pkg prefix tros_vision_nav --share`/params/params.yaml
# 使用标定结果设置 robot_to_camera_x robot_to_camera_y
标定旋转矩阵和平移向量Z
准备环境
将机器放置在平整地面上,前方1m范围内,左边、右边0.5m范围内没有任何障碍物。
启动标定程序
打开RDK终端,启动环境感知:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml stereonet_pub_web=True run_perc=False run_slam=False run_nav=False run_explore=False run_mask_depth=False pcl_process_mode=1 pcl_in_pcl_frame_id=camera_link pcl_out_pcl_frame_id=camera_link pcl_filter_max_x=1.0 pcl_filter_max_y=0.5 pcl_filter_min_y=-0.5 pcl_filter_min_z=-1.0 max_obstacle_height=2.0 bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
此时PC打开WEB浏览器(chrome/firefox/edge)输入 http://IP:8000(IP为RDK IP地址),能够查看到相机画面。 RVIZ上,将坐标系设置为base_link/base_footprint,勾选PclObstacle,移动底盘,确保rviz上渲染的点云是平面。
| WEB可视化 | RVIZ可视化 |
|---|---|
 |
 |
更新标定参数
RDK终端将会打印如下标定结果信息:
[tros_container-2] [WARN] [1776682622.617492624] [pcl_filter]: Sensor Roll: 0.014, 0.792°, Pitch: 0.133, 7.622°, Camera Height: 0.146 m
[tros_container-2] [WARN] [1776682622.617754583] [pcl_filter]: You can set tf with cmd: 'run tf2_ros static_transform_publisher --roll -0.014 --pitch -0.133 --x 0.0 --y 0.0 --z 0.146 --frame-id base_footprint --child-frame-id camera_link'
说明标定出来的相机距离地面高度(Camera Height)为0.146 m。
修改配置文件中calibration的参数,使用log中run tf2_ros static_transform_publisher提示的–roll和–pitch设置旋转矩阵,使用Camera Height(–z)设置robot_to_camera_z:
# 打开配置文件
source /userdata/vims/install/local_setup.bash
vi `ros2 pkg prefix tros_vision_nav --share`/params/params.yaml
# 使用标定结果中的roll和pitch设置 robot_to_camera_roll robot_to_camera_pitch
# 使用Camera Height(--z)设置robot_to_camera_z
使用(验证)标定参数
停止终端下的程序,将机器放置在平整地面上,前方1m范围内,左边、右边0.5m范围内没有任何障碍物。运行如下命令:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml stereonet_pub_web=True pcl_en_debug=True run_perc=False run_slam=False run_nav=False run_explore=False run_mask_depth=False pcl_filter_max_y=0.5 pcl_filter_min_y=-0.5 bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
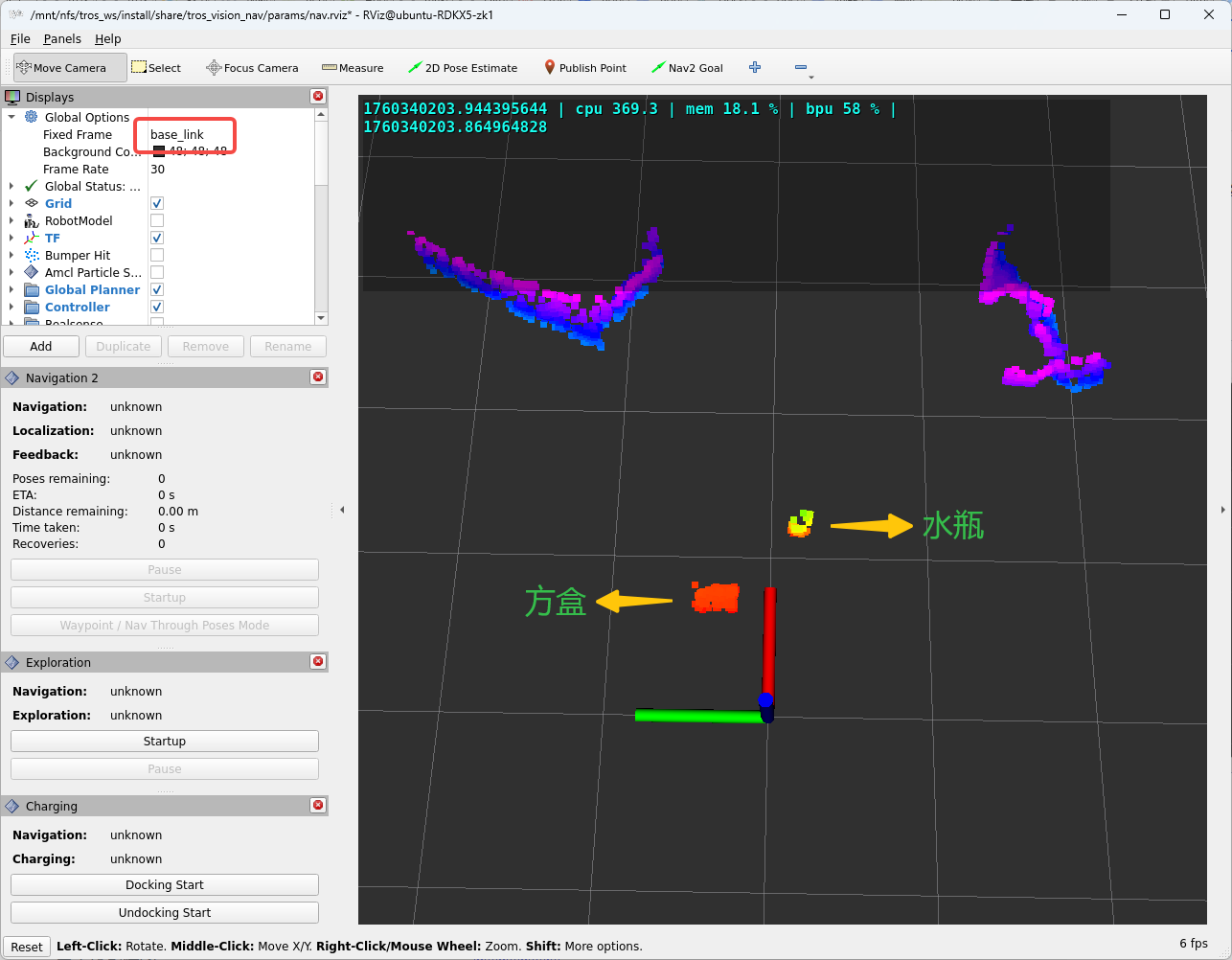
终端输出如下log,说明标定正确:
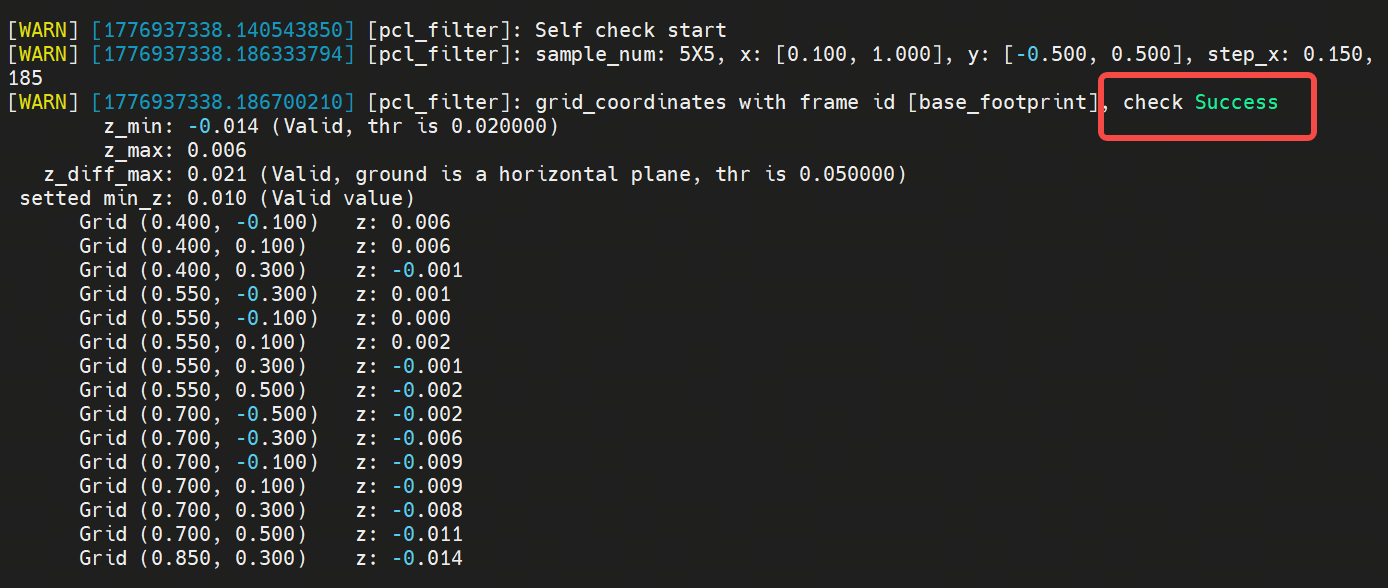
RVIZ上,将坐标系设置为base_link/base_footprint,勾选PclObstacle。在机器人前方摆放障碍物,可以看到识别出的方盒和水瓶两种障碍物的点云:
| WEB可视化 | RVIZ可视化 |
|---|---|
 |
 |
6.2 底盘高度标定
通过标定,得到底盘的高度,用于过滤高于底盘的障碍物,使机器人能够从高于底盘的障碍物下方通过(例如从桌子下面穿过)。不同工装对应的参数不同。
开始标定
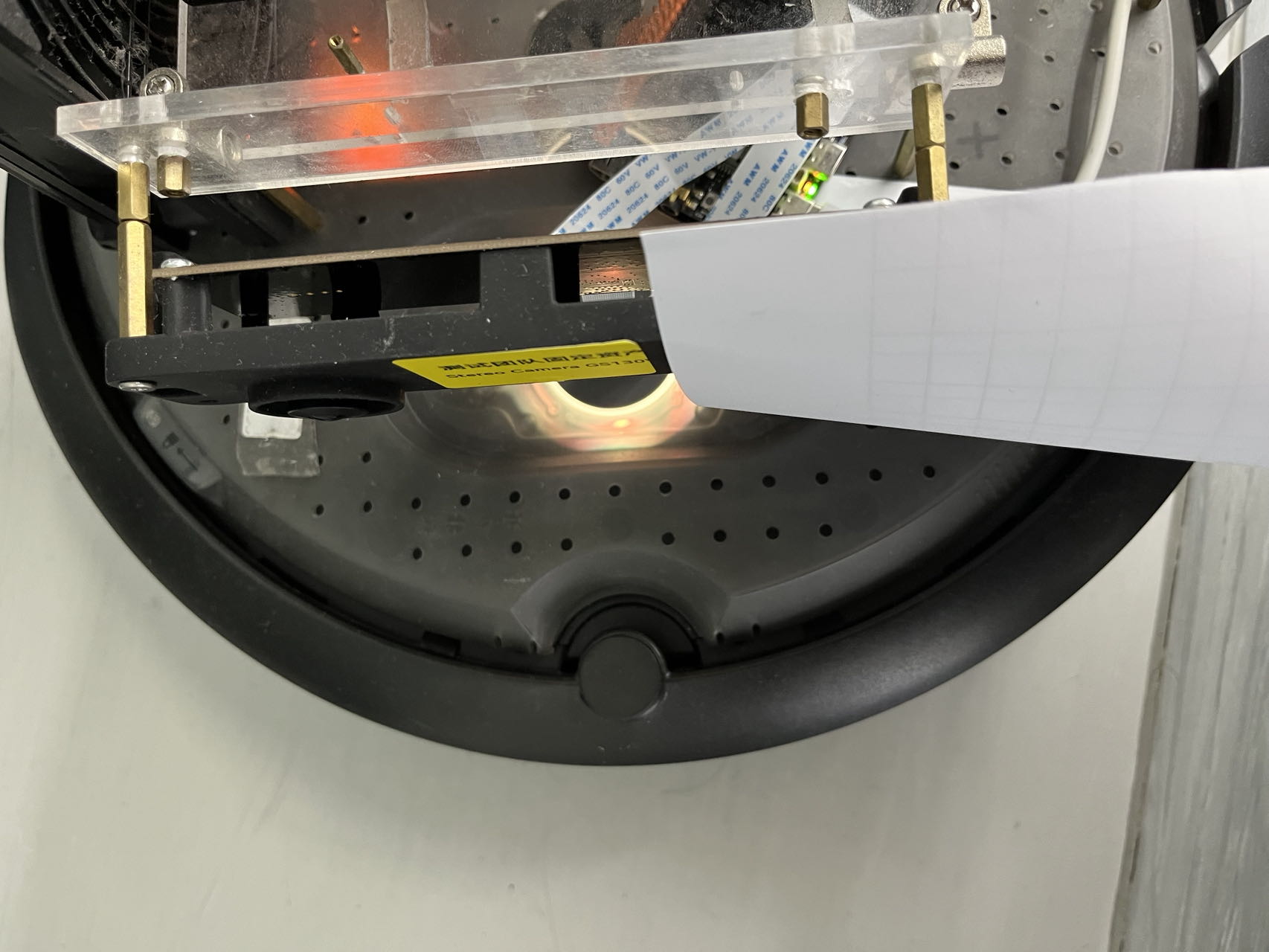
底盘安装完成后,使用尺子测量底盘最上方和地面之间的高度。例如对于如下图工装,测量出来的底盘高度为0.22m。为了使机器人能够顺利避障高出障碍物,选取0.25m作为底盘高度。
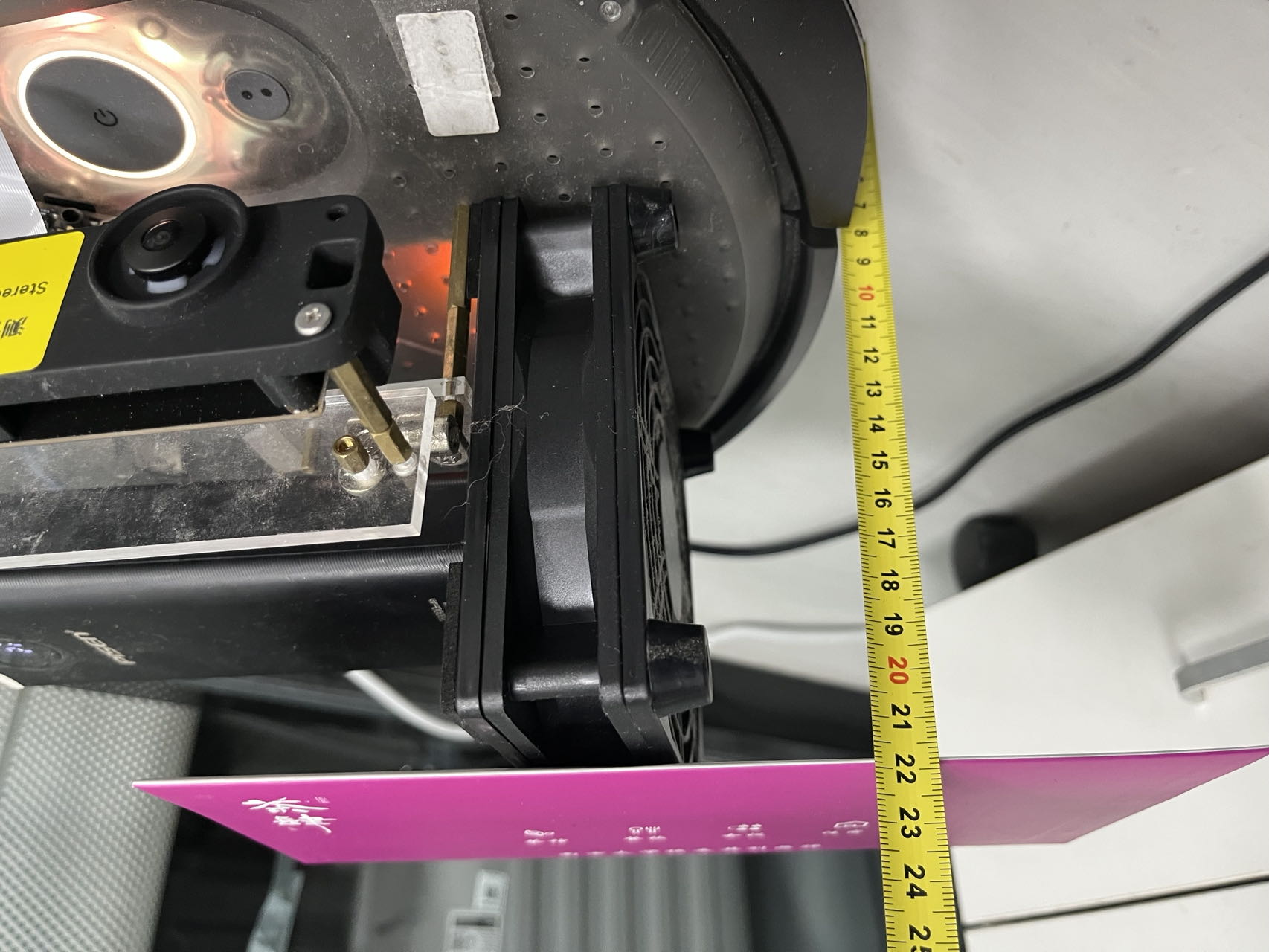
标定出来的参数用于设置配置文件中参数:rtabmap_Grid_MaxObstacleHeight:=”‘0.25’” max_obstacle_height:=0.25。
# 打开配置文件
source /userdata/vims/install/local_setup.bash
vi `ros2 pkg prefix tros_vision_nav --share`/params/params.yaml
# 使用标定结果设置 rtabmap_Grid_MaxObstacleHeight max_obstacle_height
使用(验证)标定参数
在机器人正前方,摆放不同高度障碍物,用于验证标定结果。 打开RDK X5终端,运行如下命令,包含环境感知,和rviz可视化:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml stereonet_pub_web=True run_nav=False run_explore=False rtabmap_Grid_3D="'true'" bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
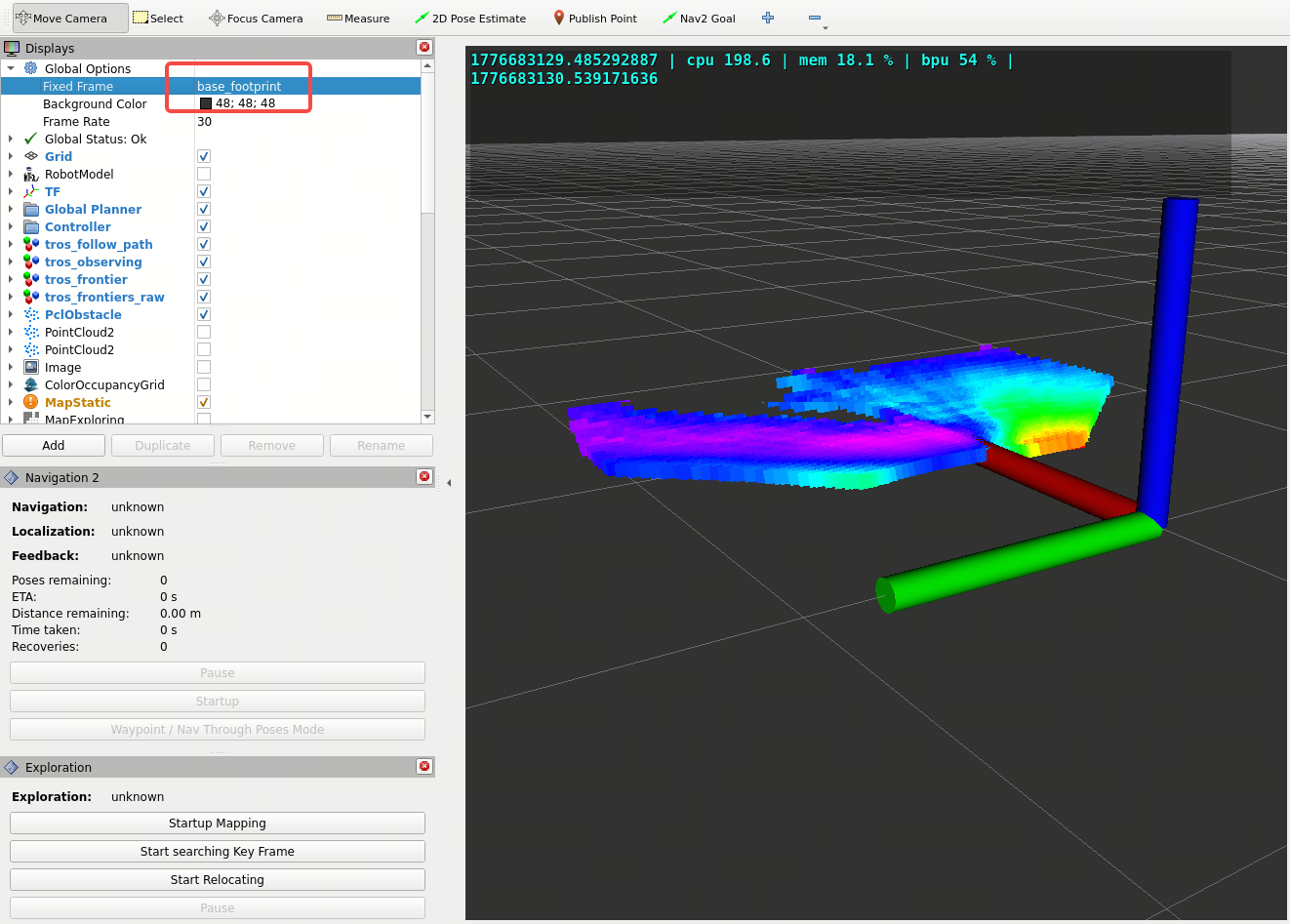
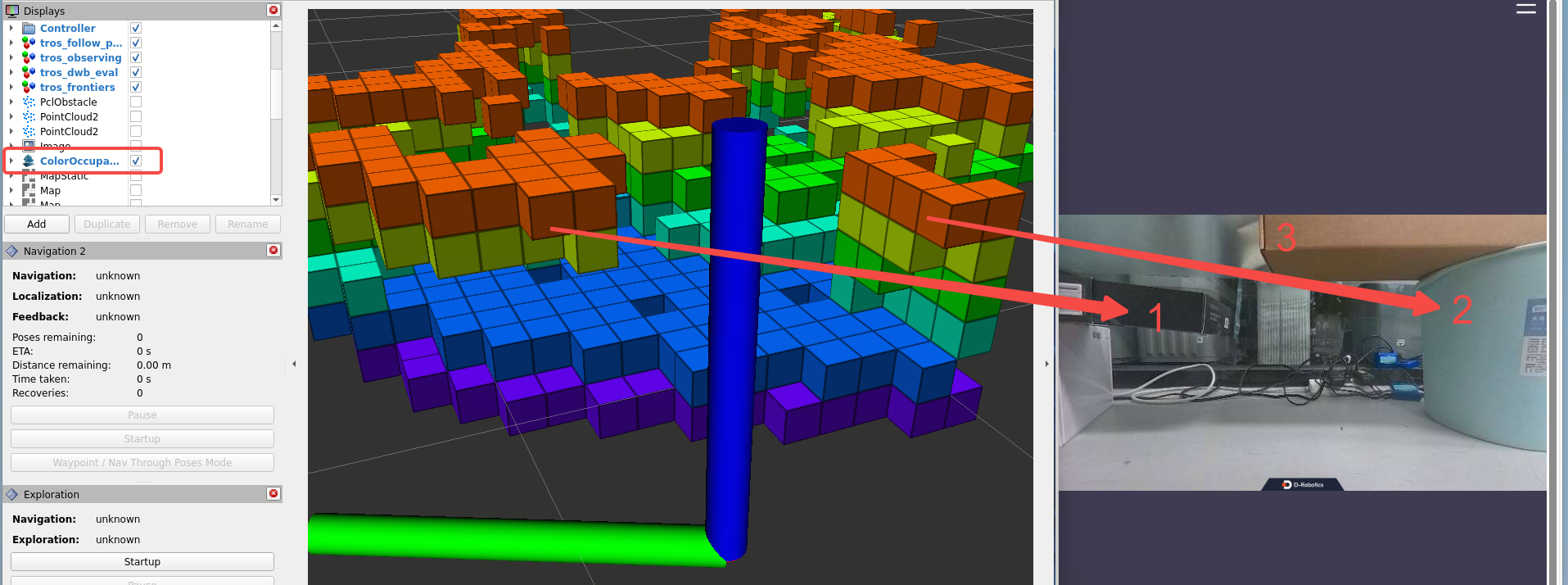
RVIZ上分别打开3D地图和障碍物点云的渲染,如下图:
| 3D地图 | 障碍物点云 |
|---|---|
 |
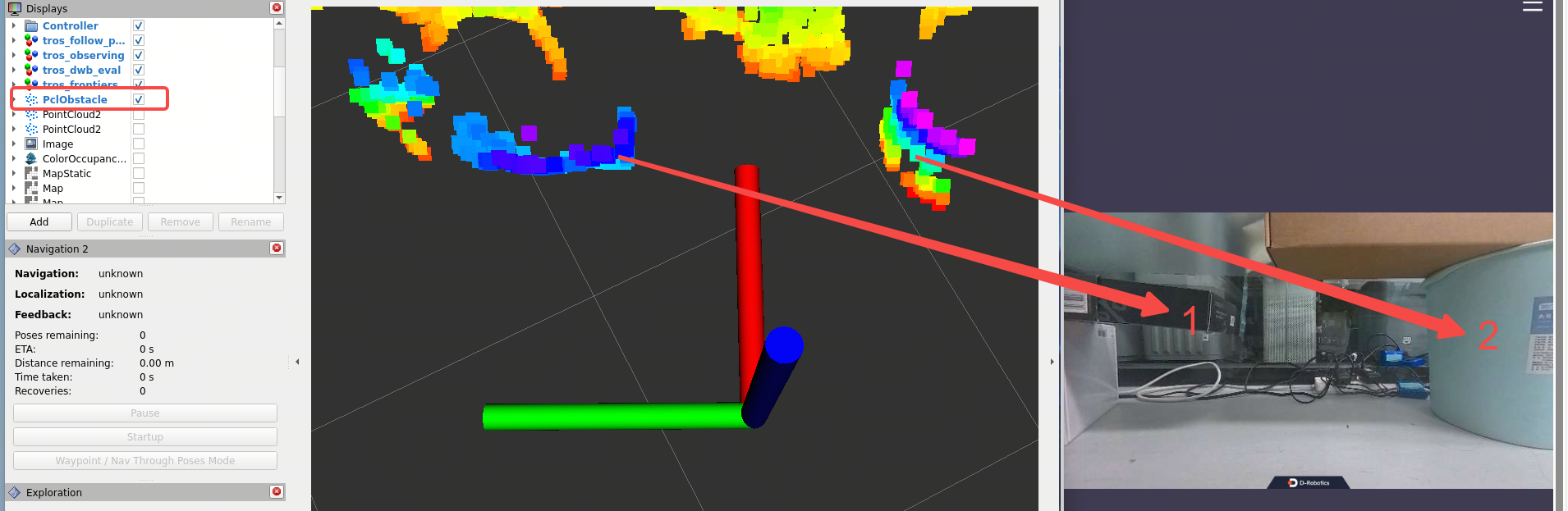 |
其中障碍物1离地高度0.18m(低于阈值0.25m),障碍物3离地高度0.27m(高于阈值0.25m)。可以看到地图和点云只有障碍物1的渲染,无障碍物3,说明标定参数生效。
6.3 相机和底盘外参标定(高精度标定)
如果相机和底盘之间yaw角较大,或者对标定精度有极高要求,请参考相机和底盘外参标定(高精度标定)进行标定。
7. 应用示例
本章节介绍使用移动底盘运行VSLAM、导航和避障等示例的方法。
如果您没有移动底盘,仍然能够运行VSLAM(VIO和3D建图)示例,具体方法参考手持建图章节。
7.1 Checklist
运行应用示例前,请先检查是否已经完成必要的基础配置项,并已更新到配置文件:
`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml
| 基础配置项 | 参数 | 配置方法 |
|---|---|---|
| 相机和底盘外参 | robot_to_camera_x robot_to_camera_y robot_to_camera_z robot_to_camera_roll robot_to_camera_pitch |
相机和底盘外参标定章节 |
| 底盘高度 | rtabmap_Grid_MaxObstacleHeight max_obstacle_height |
底盘高度标定章节 |
| 验证标定参数 | —— | 相机和底盘外参标定章节中【使用(验证)标定参数】小节 |
提示: 如未使用套件默认的硬件,即存在如下任意一种情况,请完成下面表格中的额外配置项。
- 未使用 OriginBot 底盘
- 未使用 70mm 基线双目相机
- 未使用 VIO (vio模式),使用轮式里程计(wheel模式)
| 额外配置项 | 参数 | 配置方法 |
|---|---|---|
| 底盘类型 | robot_base | 根据机器人底盘类型选择 |
| 相机参数 | mipi_rotation | 70mm基线(带IMU)相机设置为0.0,其他相机设置为90.0 |
| 里程计类型 | odom_type | wheel/vio |
| 运动类型 | rtabmap_Reg_Force3DoF | vio 模式设置 False,wheel 模式选择 True |
| 运动类型 | rtabmap_Mem_UseOdomGravity | vio 模式设置 True,wheel 模式选择 False |
注意:
- 基于点云的通用障碍物识别算法,默认开启了自适应阈值(
params.yaml配置文件中的en_pcl_filter_min_z_auto_adjust配置项),即启动时自动计算并更新阈值。- 启动时要求机器放置在平整、无反光地面上,地面上可以存在障碍物,但是机器人正前方[0.3米, 1.0米]范围内至少存在一块15cm*15cm的无障碍物区域。
7.2 双目视觉里程计(VIO)
本章节介绍如何启动双目视觉里程计,并可视化机器人的移动轨迹。
启动VIO
打开RDK X5终端,运行如下命令,包含双目深度估计,VIO,rviz可视化:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml odom_type=vio stereonet_pub_web=True run_pcl2grid=False run_rviz=True run_perc=False run_slam=False run_nav=False run_explore=False run_mask_depth=False bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
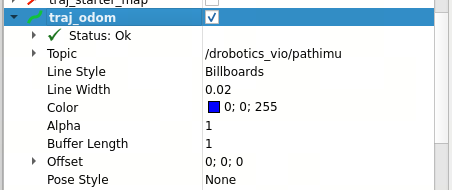
配置RVIZ
RVIZ上,将坐标系设置为base_link,勾选traj_odom,并选择topic为/drobotics_vio/pathimu。
启动键盘控制
打开RDK X5终端,运行如下命令,启动键盘控制功能包,用于使用键盘控制机器人移动:
source /opt/tros/humble/local_setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
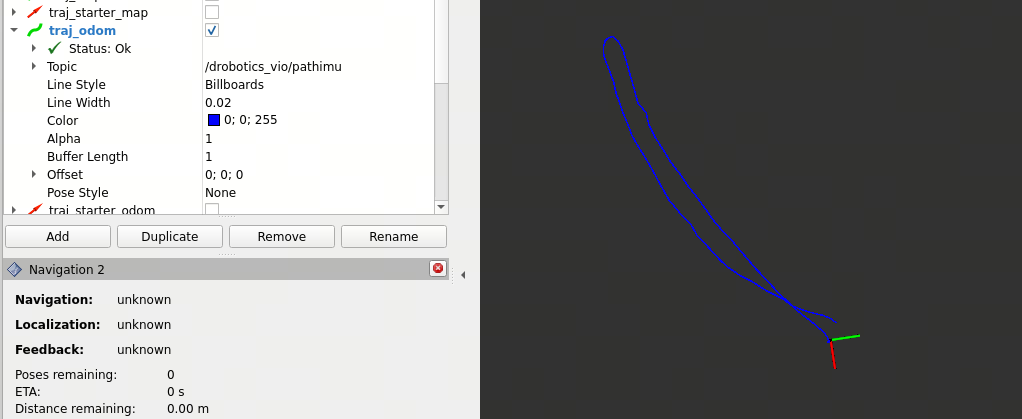
测试
使用键盘控制机器人移动,rviz上将会渲染机器人移动轨迹:
7.4 VSLAM建图
本章节介绍如何使用VSLAM生成用于导航的2D地图。
启动solution
打开RDK X5终端,运行如下命令,包含环境感知,VSLAM,导航,自主探索建图,rviz可视化:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
mkdir -p /userdata/rtabmap/
# 删除地图文件
rm /userdata/rtabmap/office.db
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
提示
- 当Rviz上渲染出地图,并且Exploration状态为IDLE时,表示启动完成,可以开始启动自主探索建图。
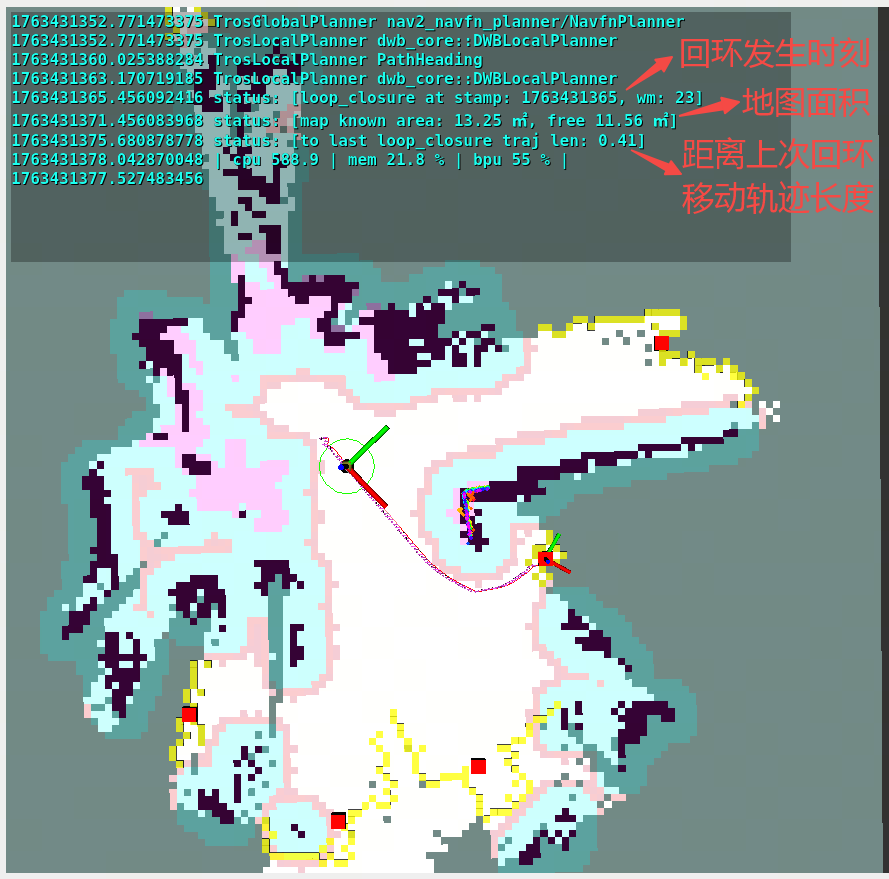
- 建图过程中,rviz上(下图)会渲染SLAM回环发生时刻(loop_closure at stamp,只显示了时间戳秒部分)、地图面积(map known aera)和距离上次回环机器人的移动轨迹长度(to last loop_closure traj len)。
- 当距离上次回环的轨迹长度超过5米时,将会自动暂停自主探索,控制机器人回到已建图区域,使其发生回环,避免由于累积误差过大导致地图出现偏差。
- 发生回环后,rviz上将会刷新回环发生时刻,以及轨迹长度,此时可以恢复自主探索建图。 完成建图后,如发现地图存在偏移或者其他明显错误,需要通过导航或者手动控制机器人到错误地图处更新地图。
- 默认关闭3D建图,启动建图时使用参数打开:rtabmap_Grid_3D=”‘true’“。开启3D建图将会导致回环检测速度显著变慢,请根据实际需求选择是否开启3D建图。
| 启动完成后rviz端的渲染 | 自主探索建图中rviz端的渲染 |
|---|---|
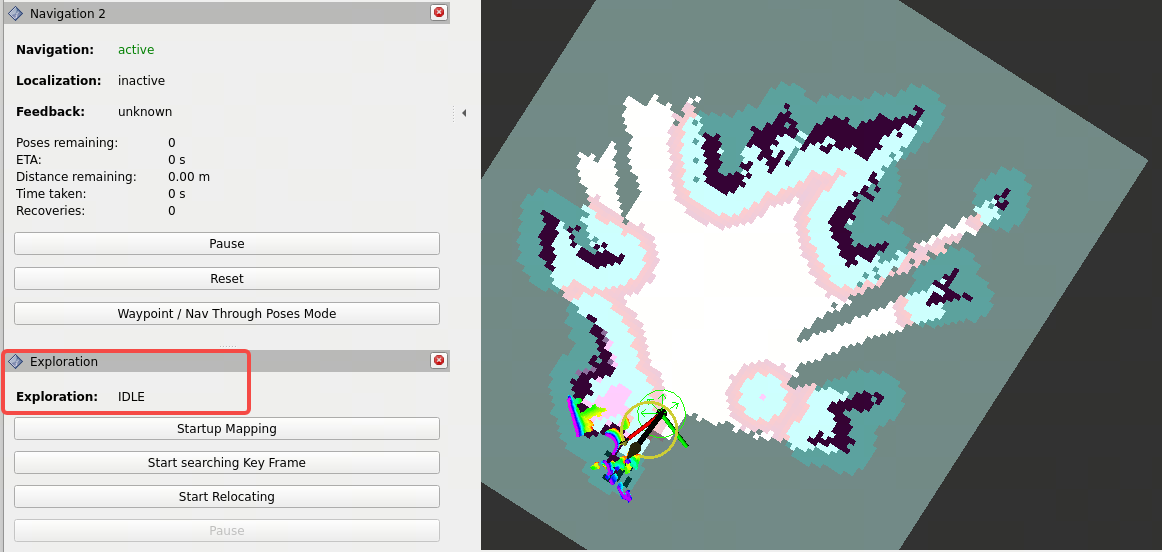 |
 |
配置RVIZ
RVIZ上,将坐标系设置为map。
自主探索建图
在RVIZ上启动自主探索建图:
| rviz自主探索建图按键说明 | 自主探索建图过程 |
|---|---|
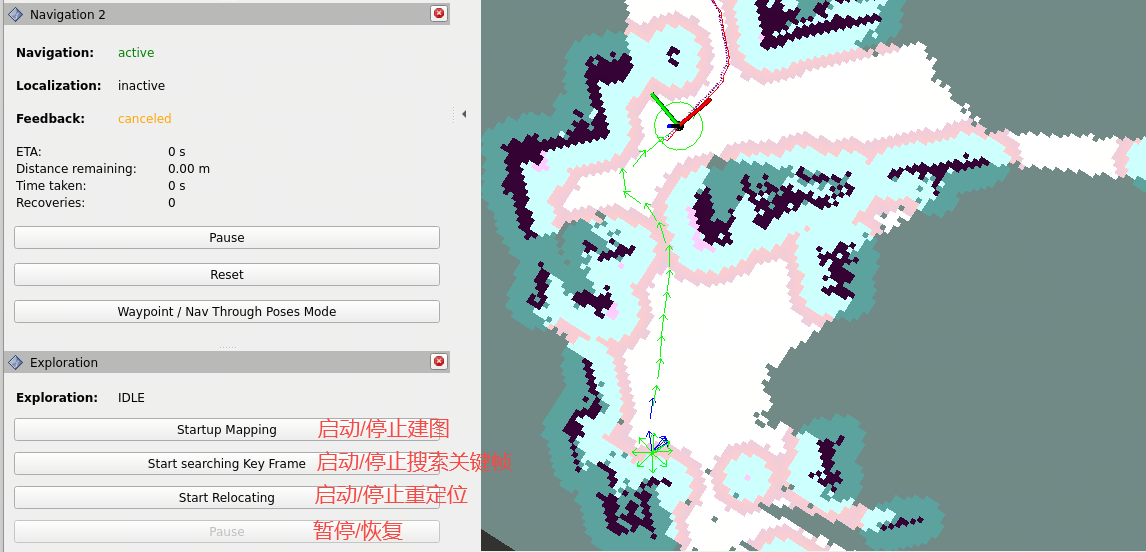 |
 |
提示
- 自主探索建图过程中,选择Pause(暂停)按键将会暂停探索,并将本次探索目标位置加入灰名单,选择Resume(继续)按键将会选择一个新的目标位置进行探索。
- 当所有目标都探索完成后,将会清除灰名单中的目标。
- 自主探索建图过程中,如果需要跳过当前探索目标,可以使用Pause(暂停)功能。
手动控制建图
打开终端,启动键盘控制功能包,使用键盘控制机器人移动实现建图:
source /opt/tros/humble/local_setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
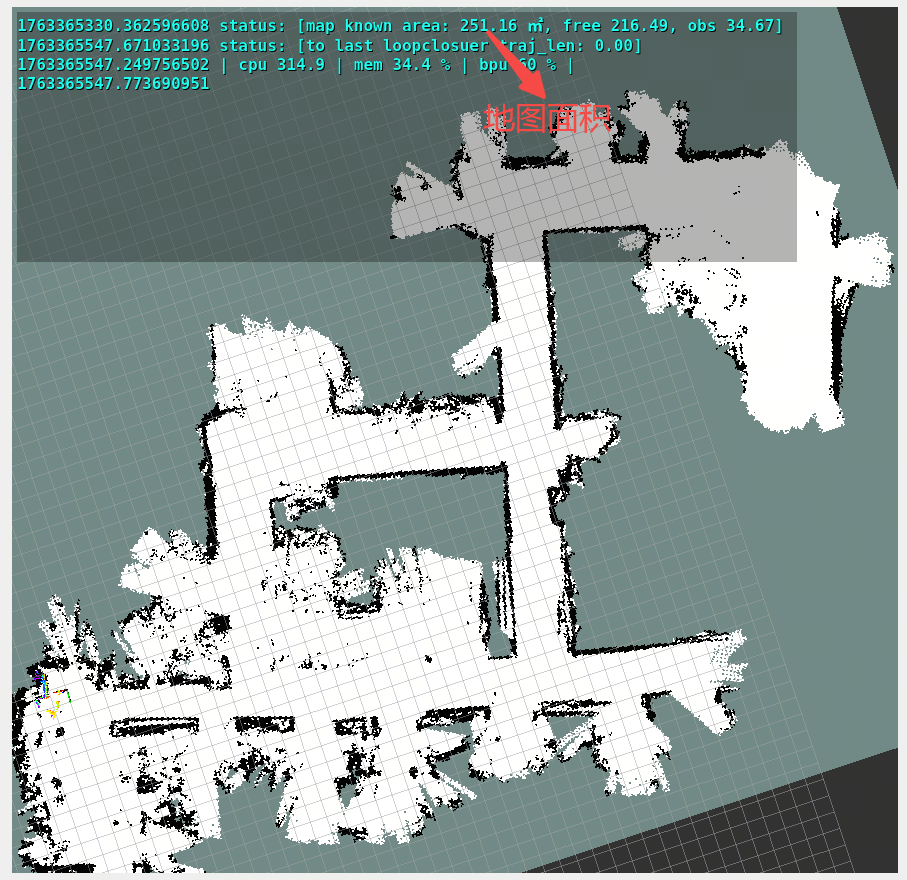
地图面积
建图过程中,rviz上将会实时显示地图面积:
7.5 导航和避障
本章节介绍如何使用已经创建好的地图进行导航和避障。
启动solution
打开RDK X5终端,运行如下命令,包含环境感知,VSLAM,导航,重定位,rviz可视化:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
提示 建图和定位两种模式的启动命令相同,solution内部根据当前环境和系统状态,自动切换模式。
启动时重定位
定位模式下,SLAM启动后,机器人将会自动进入到重定位状态,定位成功后RVIZ上显示如下启动重定位成功信息:
绑架后重定位
定位模式下,抬起机器人,搬移到新位置并放回地面上后,机器人将会自动进入到重定位状态,重定位中和重定位成功后RVIZ上显示如下信息:
| 重定位中 | 重定位成功 |
|---|---|
 |
 |
重定位过程:
导航效果
在RVIZ上选择导航的目标点,导航过程和完成后的结果如下:
7.6 手持建图
本章节介绍在没有移动底盘的情况下,运行VSLAM(VIO和3D建图)示例的方法。
-
参考RDK X5上安装双目相机和软件配置章节完成相机的安装和配置。
-
打开RDK X5终端,运行如下命令,包含base_link和base_footprint之间的tf变换,环境感知,VSLAM,rviz可视化:
source /opt/tros/humble/local_setup.bash
source /userdata/vims/install/local_setup.bash
ros2 run tf2_ros static_transform_publisher --frame-id base_link --child-frame-id base_footprint --z -0.0 &
YAML_CONFIG_FILE=`ros2 pkg prefix tros_vision_nav --share`/params/params.yaml rtabmap_Grid_3D="'true'" rtabmap_Grid_MaxObstacleHeight="'0.75'" run_pcl2grid=False run_nav=False run_explore=False bash `ros2 pkg prefix tros_vision_nav --share`/launch/run_launch.sh
- 手持RDK X5缓慢移动,支持roll和pitch角度变化,定位和建图效果如下:
7.7 人机交互[TODO]
8. 适配其他底盘
本章节介绍将基于VIO算法的移动Solution套件迁移到其他底盘的方法(如自研底盘myrobot)。 以下以自研底盘(myrobot)举例介绍适配底盘方法。
8.1 前置条件
- 由于采用VIO作为里程计,底盘只需要电机,无需编码器和IMU。
- 已完成通过MCU控制自研底盘电机。
- 已完成基于ROS2 Humble版本的电机驱动功能(例如功能包为myrobot_base)开发。能够使用ROS2的键盘遥控工具(teleop_twist_keyboard功能包),通过键盘发送控制指令来操作机底盘移动。
8.2 连接硬件
将RDK X5和相机固定到自研底盘上。
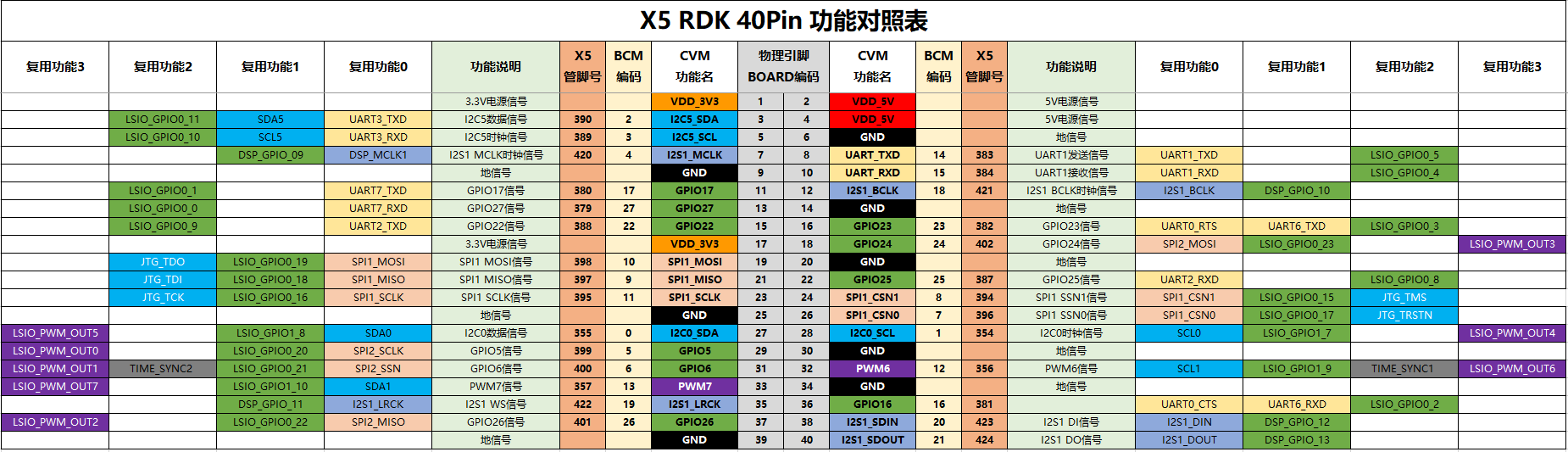
使用串口通信线连接MCU控制器和RDK X5。其中RDK X5的串口GND, TX, RX分别对应的6, 8, 10管脚。
8.3 安装软件
将ROS2 Humble版本的电机驱动功能(myrobot_base功能包)迁移到RDK X5上。
RDK X5上运行myrobot_base功能包。
RDK X5上运行ROS2的键盘遥控工具:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
通过键盘能够正常控制底盘运动,说明硬件连接和软件安装成功。
8.4 外参标定
参考外参标定章节完成相机和底盘之间的外参标定。
8.5 适配移动Solution
打开配置文件
source /userdata/vims/install/local_setup.bash
vi `ros2 pkg prefix tros_vision_nav --share`/params/params.yaml
根据实际使用的机器人底盘半径更新如下配置(以机器人底盘半径为0.20米举例):
robot:
robot_base: myrobot
myrobot:
robot_radius: 0.20
inflation_radius: 0.30
inflation_footprint_radius: 0.10
recovery_inflation_radius: 0.26
其中robot_radius为底盘半径,其他参数建议值如下:
- inflation_radius: robot_radius * 1.5
- inflation_footprint_radius: robot_radius * 0.5
- recovery_inflation_radius: robot_radius * 1.3
8.6 运行移动Solution
RDK X5上启动base_link和base_footprint 之间的tf变换,z的值为底盘轮子半径:
ros2 run tf2_ros static_transform_publisher --frame-id base_link --child-frame-id base_footprint --z -0.05
RDK X5上启动电机驱动功能myrobot_base,例如:
ros2 run myrobot_base myrobot_base
参考Checklist章节检查参数是否全部完成配置后,即可运行应用示例章节示例。
9. 版本发布记录
版本号:0.0.5
初始版本。
10. FAQ
详见 FAQ